基于智能铅鱼的节能型水文缆道自动测流WEB监控系统
2020-01-01付琛,徐清
付 琛, 徐 清
(1. 无锡商业职业技术学院 物联网技术学院, 江苏 无锡 214153;2. 无锡市清新智控自动化技术有限公司, 江苏 无锡 214011)
河道流量测验是水文测量中必不可少的一项工作,它对水利工程建设管理、防汛抗旱、水资源管理与保护工作等都起着非常重要的作用[1]。水文缆道铅鱼流速仪测流方式是传统水文站的主要水文测验手段,也是当前国内大部分水文站所采用的方式[2-3]。但是采用水文缆道测流目前还存在着如下问题:(1) 自动化程度不高,劳动强度大且工作效率低,至少需要2名人员分别操作动力设备、测量仪器和成果计算软件才能完成测流任务;(2) 流量测量装置功耗高,需要频繁更换电源,这使得水文站随时测流存在困难;(3) 传统铅鱼入水姿态存在偏差,导致测流精度存在误差;(4) 铅鱼监测的信号(水面、水底、流速)传输效果不好[4-5],为了解决该问题,有学者提出利用缆道循环索作载波信号导体,采用改变脉宽的数字编、解码技术,通过2KHZ的载波调制信号进行“无线”回传,但是这种方式信号容易受到干扰,尤其是恶劣天气影响更大,从而造成监测数据不准确;(5) 监测数据仅能传输到岸边控制室,数据不能直接上传至云端保存,水利信息化程度偏低,这在一定程度上影响了水文测验工作的质量与效率[6]。因此,结合现代化变频调速技术、远程网络管控技术、通信技术等,开发一种节能型的带水流流向辨识的水文缆道WEB监控系统,将具有极其重要的研究意义与设计应用价值。
一、水文缆道测流原理
河道流量主要采用流速-面积法进行测量。所谓流速-面积法[7-8],即以流速垂线为界,将水断面划分为若干区域,然后通过测量河道断面的某些点、线的流速平均值乘以断面面积,分片求和计算得知河道流量。其断面面积划分示意如图1所示,相应的断面总流量计算流程依次如式(1)~(4)所示。断面的垂线水平间距以及垂线段测速位置主要依据《河流流量测量规范》《灌溉渠道系统量水规范》等国家标准设定。
A2-A7两两垂线间的断面面积为:
(1)
岸边两侧部分A1、A8的断面面积为:
(2)
(3)
断面的总流量为:
(4)
其中,di是指某一流速垂线处的水深;i是测速垂线的序号;wi是指某一部分的断面宽度;Ai是指某断面的面积;vi是指某一部分的断面平均流速;Q是指断面的总流量。
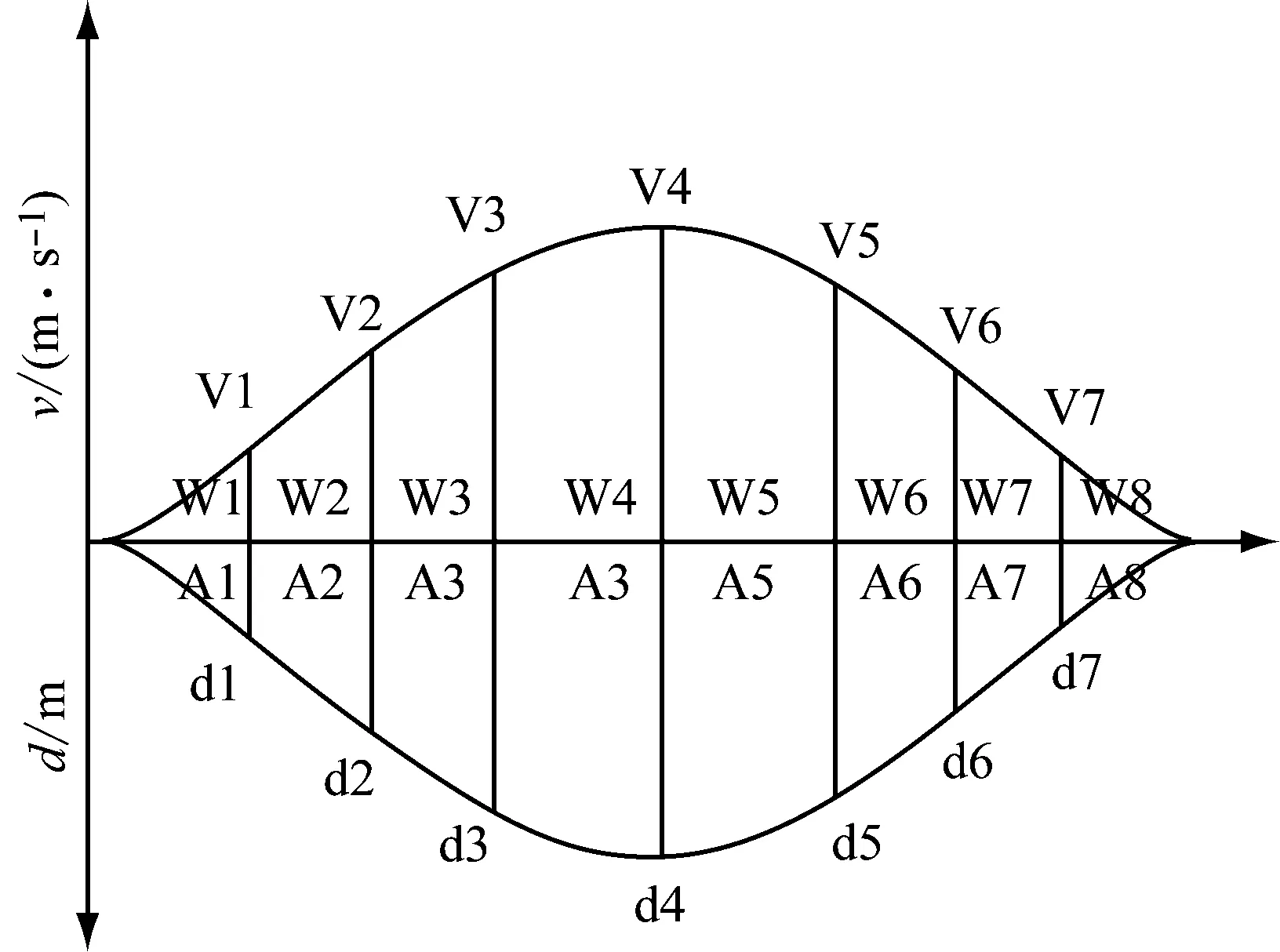
图1 河道断面面积划分示意
二、水文缆道测流装置简介
水文缆道测流装置如图2所示。该装置主要由水文绞车、测流铅鱼、测验吊箱、PC以及配套电气控制柜组成。其中,水文绞车主要由两台异步电机与配套的滑轮组件组成,用来驱动测流铅鱼进行上下、进退运行,带动测验吊箱进退运行。在水文绞车转动轴上安装有增量式光电编码器,用以精确测量测验吊箱以及测流铅鱼所在位置。测验吊箱内置有测流信号处理电子装置,主要用于协同测流铅鱼移动并接收测流铅鱼发来的测量信号,同时负责与远程测验房核心控制器PLC之间的数据交互。测流铅鱼中安装有水面、水底、流速仪三个传感器,主要用于测量水深与流速。以上三个传感器输出均为开关量信号,输出信号与测验吊箱中单片机进行有线连接,以此解决信号传输中的不确定性。PC以及配套电气控制柜主要是完成水文测流的远程自动监控以及信息化数据处理。
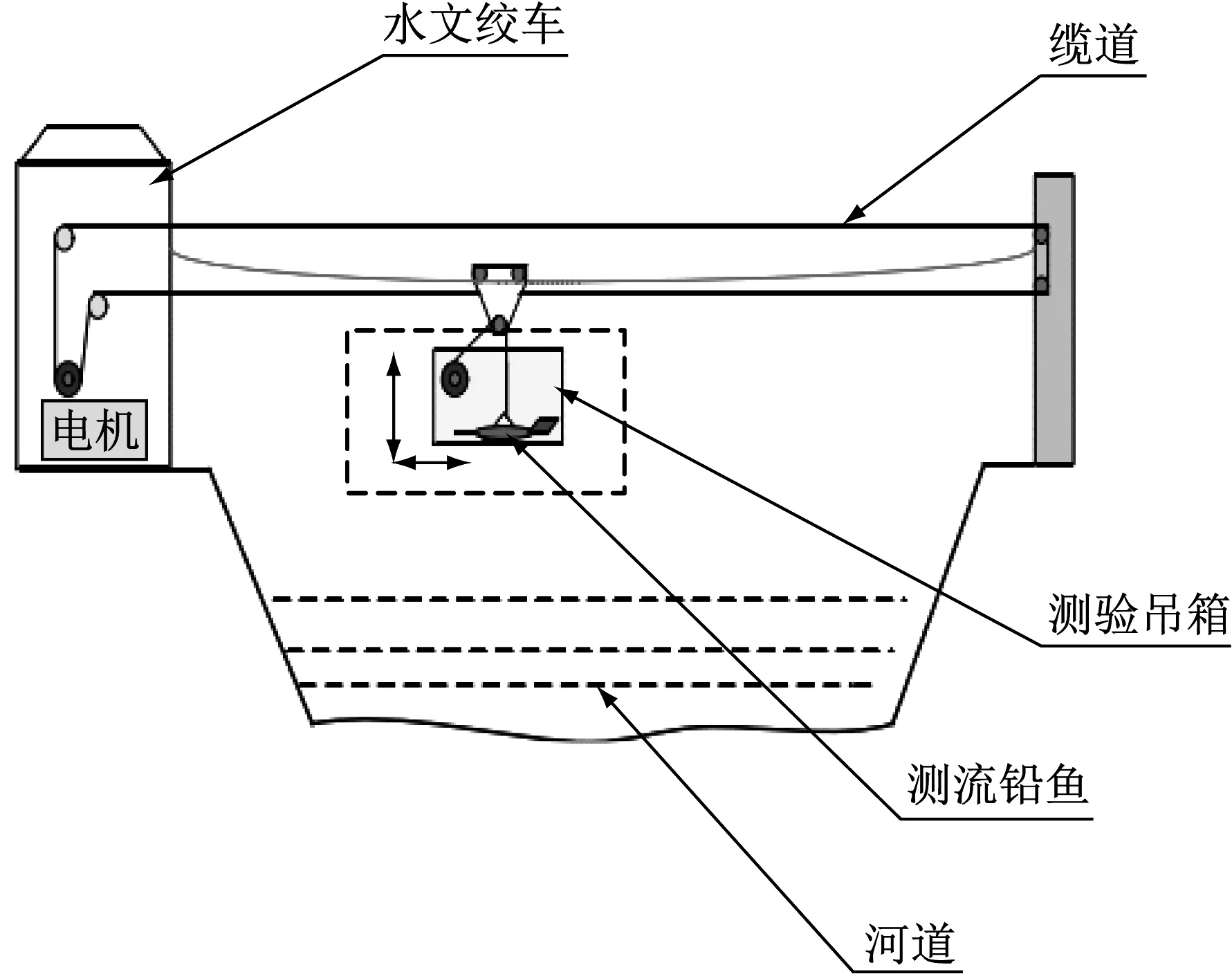
图2 水文缆道测流装置示意
三、水文缆道自动测流WEB监控系统硬件设计
为了能够实现水文缆道就地手动(自动)测流、就地(远程)参数设置与流量测试数据存储、查询等功能,该自动测流WEB系统主要按照图3所示的拓扑结构进行硬件连接。
系统的操作终端为PC机和测验房内的电气控制柜。其中,测验房内电气控制柜的核心控制器PLC主要是负责与上位PC端以及下位测流电子装置之间的通信,同时利用水文绞车机械装置,通过与变频器之间的交互实现对测验吊箱以及测流铅鱼位置的水平与垂直位置的控制[9]。单片机作为下位测流电子装置的主要控制器[10],其供电受远程PLC无线遥控。它的主要功能如下:(1)接收铅鱼传输的水面以及水底姿态信号,接收由流速仪传来的脉冲信号;(2)发送测流以及姿态结果给测验房电气控制柜内的PLC,实现流量测量与显示。PLC与远程PC以及单片机之间主要通过以太网连接,采用MODBUS TCP/IP协议进行通信;其中PLC与单片机之间通过无线AP构建网桥实现。
四、自动测流系统的关键技术
(一)基于智能铅鱼的水深与流速测量精度提升技术
利用铅鱼定点测流时,一般采用悬索缆道将装有旋桨式流速仪的铅鱼垂直放入水下预定位置即可。但是在铅鱼入水后,一方面水流冲击力的影响会导致湿绳干绳悬索偏角过大,引发水深测量误差;另一方面会在铅鱼姿态未稳定就开始启动流速仪脉冲计数,从而使得系统获得的流速值与实际值偏差过大。为了提高测量精度,基于卡尔曼滤波算法的智能铅鱼设计方法[11-12],在该铅鱼中增加了MPU9250型低功耗姿态传感器,通过I2C转串口方式与单片机进行通信,利用卡尔曼滤波算法对陀螺仪、加速度计两大传感器获取的姿态角进行数据融合,从而获得铅鱼的横滚角、俯仰角以及偏航角。若横滚角和俯仰角之间的偏差不超过5°则认为铅鱼已经稳定,然后启用流速仪检测。另外,利用获取到的偏航角进行水深系数矫正。

图3 自动测流WEB监控系统示意图
(二)绿色节能防干扰技术
传统的水文测量装置功耗较高,往往需要频繁更换电池。但是水文缆道测量河道形式不一,这给实际测量带来了一定的困难。为此,采用了以下两种措施进行绿色节能:(1) 在测验房以及吊箱上安装了一对低功耗的遥控收发装置。其中,测验房外的遥控发射装置启用受PLC控制,而吊箱上的遥控接收装置一直处于在线状态。当需要测量时,则采用如图4所示的电路开启遥控发射装置,从而发出启动信号,当遥控接收装置接收到信号后输出开关信号激活单片机测流装置,投入使用。(2) 在吊箱内安装的单片机测流装置由蓄电池供电。当单片机测流装置投入使用时,利用太阳能板对蓄电池充电,保证测量过程中电源供给充足。(3) 单片机测流装置电路中选用LTC3440高效率开关电源电路以及STM8L型超低功耗的CPU。


图4 就地单片机测量装置节能型供电方法示意
许多学者利用索道采用无线回传的方式进行测流信号的传输,但是其容易受到干扰。为了提高系统的抗干扰能力,系统中采用了如下两种方法:(1) 铅鱼与单片机测流装置间采用屏蔽导线直连方式;(2) 单片机与PLC之间在软件上设置了心跳包程序,即单片机通电后定时N秒发送在线检测数据,PLC在N+3秒内检测是否收到单片机发送的在线检测数据。如果在N+3秒内PLC检测到有数据,则认为通信正常,同时将在线检测数据清零,并再次进行通信检测。如果在N+3秒内PLC未检测到有数据,则认为通信错误,同时停止所有动作并进行报警。
五、自动测流系统PLC程序的实现
自动测流系统的工作流程如图5所示:远程PC端设置好测试模式后,发送测试命令,PLC收到该命令后,利用遥控方式开启蓄电池供电,同时检测PLC与单片机之间通信是否正常。一切准备工作就绪后,若系统处理手动模式,则通过测验房内电气柜按钮进行固定点位测流;若系统处于自动模式,则首先由PLC驱动测验吊箱到达测试起点距,进行该点位的河道水深测量,从而确定测试的垂直点位数;然后再由PLC按照各个不同的垂直测试点位,通过变频驱动电机的方式调节水文绞车上测流铅鱼以及测流吊箱的位置,由单片机完成测速信号、铅鱼姿态的采集以及数据处理。获取到流量数据后,由单片机、PLC以及PC、云平台服务器之间的以太网通信完成数据的存储、分析、处理以及管理等。当所有测试点位全部完成后,由系统驱动测流铅鱼以及测验吊箱回至零点。

图5 自动测流系统的工作流程
六、自动测流系统上位PC端监控界面设计
自动测流系统远程PC端在控制系统中有着很重要的作用,它是系统的远程控制者。根据测流系统的相关要求,上位机需实现以下功能:(1) 参数(测流起点距、测流垂线点位数、位置调节速度、岸边系数等)设置与精度修正;(2) 手自动测速命令发送;(3) 测速过程视频监控[13];(4) 系统运行状态显示;(5) 断面流量计算;(6) 实时测量数据显示及存储、历史数据查询等功能。根据以上需要实现的功能,这里选用人机交互便捷、网络通信功能强大、界面设计图形化的VB.NET高级语言进行监控程序设计,在现场投入运行后的监控主界面、数据查询画面分别如图6、图7所示。
通过将PLC、通信单元以及应用PC终端构建成局域网,实现了“分布式控制”与“集中式管理”,真正实现了“互联网+”在水文监测中的应用,实现了远程遥测、自动化数据存储以及信息化管理。2018年8月起,系统相继投入运用到福建以及贵州等多个河道的流量测量,通过现场为期10多天的人工测流、自动测流数据的比对发现,该系统自动测流与人工测流的数据相对误差基本控制在4.5%左右,但是自动测流效率明显提升;与不带测流姿态修正的自动测流数据对比,发现其测流数据的重复精度较高。另外,在该系统中引入了远程桌面模式,方便了用户进行远程网络管控。

图6 远程PC端监控主画面
