提拉缸式鱼雷发射装置内弹道建模与试验
2019-12-23徐勤超潘海兵练永庆李春来李宗吉
徐勤超, 潘海兵, 练永庆, 李春来, 李宗吉
(1.华中农业大学 农业部长江中下游农业装备重点实验室, 湖北 武汉 430070;2.海军工程大学 海军兵器新技术应用研究所, 湖北 武汉 430033)
0 引言
鱼雷发射装置大多采用筒式弹射的发射方式[1-4]。这种发射方式,发射前需要预先在发射筒内装填鱼雷,发射时,高压工质直接进入发射筒推动鱼雷发射出管。装载这种鱼雷发射装置的水面舰艇,鱼雷发射作战准备时间长,载弹保障能力差,不能满足现代海战的要求[5]。因此,必须研制一种结构简单,且集储存、运输、发射于一体的鱼雷发射装置来替代筒式弹射的发射方式。
提拉缸式鱼雷发射装置方案是在参考和借鉴防空导弹发射技术的基础上提出来的[6-13]。该发射装置方案以火药或压缩空气作为发射能源,利用提拉缸组件将高压工质和鱼雷完全分离。鱼雷发射时,高压工质在提拉缸内做功,将工质的内能转变为作用在鱼雷上的拉力,从而将鱼雷发射出管,而在贮运状态下,发射筒只用于贮存和运输鱼雷。因此,这种发射装置方案能够有效解决水面舰艇载弹保障能力差,发射作战准备时间长的问题。
为了研究水面舰艇提拉缸式鱼雷发射装置的可行性,对发射装置高压空气发射过程进行了理论建模与仿真分析,并加工了小型原理样机进行了试验研究,仿真和试验结果验证了该发射方式的可行性,为发射装置的研制和优化提供了重要依据。
1 鱼雷发射装置组成及工作原理
水面舰艇提拉缸式鱼雷发射装置主要由发射箱、发射动力组件、辅助机构等组成。发射动力组件包括提拉缸、活塞、拉杆、推筒及发射气瓶;辅助机构包括制止器、安全互锁机构等。发射动力组件置于发射箱左下方,其轴线与鱼雷轴线平行,拉杆尾部与推筒连接,发射气瓶位于提拉缸侧面通过喷管与提拉缸相连。具体结构方案如图1所示。
发射鱼雷时,高压气瓶气体通过副气路打开发射箱前盖,解脱制止器对鱼雷的约束,高压气体通过主气路喷管进入提拉缸,在高压工质的作用下,提拉缸活塞带动拉杆向前运动,此时拉杆与推筒后部相接触从而拉动鱼雷加速前进。当活塞接近提拉缸底部时,提拉缸底部的排气孔会将工质压力泄放到大气中,活塞在缓冲筒作用下不再继续向前运动,推筒和鱼雷组合体继续前进,当到达分离位置时推筒的4个推臂向外张开并停止向前运动,鱼雷与推筒分离并依靠惯性继续向前运动直至出管。
2 发射过程的动力学模型
为了简化问题,本文在建模过程中作如下假设[14-16]:
1) 发射气瓶中高压空气视为干空气;
2) 假定发射过程中气体多变指数不变;
3) 由于发射过程极短,发射过程被视为绝热过程;
4)不考虑发射过程中的空气泄漏影响。
2.1 空气发射气瓶控制模型
高压空气发射气瓶控制模型主要用于计算发射过程中高压气瓶内气体压力、温度以及质量随时间的变化率。根据能量守恒和质量守恒原理推导出空气发射气瓶控制模型如下:
dpb/dt=k(pb/mb)dmb/dt,
(1)
dTb/dt=k(pb/mb)dmb/dt,
(2)
dmb/dt=-dmic/dt,
(3)
式中:pb为发射气瓶气体压力;mb为发射气瓶气体质量;Tb为发射气瓶气体温度;mic为通过喷管进入提拉缸的气体质量;k为空气绝热系数。
2.2 空气喷管流量模型
高压空气通过喷管注入提拉缸。进入提拉缸的空气质量流率可按(4)式[17-18]计算:
dmic/dt=φtstρtvt,
(4)
式中:φt为喷管流量系数;st为燃气管流通面积;ρt、vt分别为喷管流通部分气体密度、气体流速,其中ρt、vt可按(5)式、(6)式计算。
(5)
ρt=pt/TtR,
(6)
式中:R为空气气体常数;pc为提拉缸内气体压力;pt、Tt分别为喷管流通部分空气压力、温度。
2.3 提拉缸内热力学模型
气瓶中的高压空气通过喷管注入提拉缸活塞左侧,推动活塞组件运动,而右侧与大气联通,活塞只是排除提拉缸右侧的空气,在整个过程中做功可忽略不计。将活塞左侧空间中气体作为研究对象,根据开口系的热力学第一定律,可得
Uc=Uc0+Hic-Wp-Qhc,
(7)
式中:Uc为提拉缸中气体的内能;Uc0为提拉缸内气体的初始内能;Hic为通过喷管进入提拉缸内的焓;Wp为推动鱼雷所做的功;Qhc为传热损失。
利用热损失系数η来替换Qhc,并将气体内能的数学表达式写成微分形式可得
dUc/dt=ηdHic/dt-dWp/dt.
(8)
提拉缸中的气体视为理想气体,缸内气体温度与压力的微分计算式为
(9)
(10)
式中:Tc为提拉缸内气体温度;mc为提拉缸内空气的质量;Vc为提拉缸的充气容积;cv为气体的定容比热容。由于提拉缸中的气体为从喷管流入的高压气体,故
dmc/dt=dmic/dt.
(11)
根据提拉缸装置的结构可知,提拉缸的充气容积与活塞行程相关,在做功区间内提拉缸中气体充气容积变化率为
dVc/dt=Spvp
(12)
式中:vp为活塞运动速度;Sp为气体对提拉缸活塞作用面面积。
2.4 发射过程联合仿真模型
根据提拉缸式发射装置与鱼雷的相互作用关系,将发射装置简化为贮运发射箱、提拉缸、提拉杆、推筒、鱼雷5个部分,建立提拉缸式发射装置的虚拟样机模型,如图2所示。
图2 提拉缸发射装置虚拟样机模型Fig.2 Virtual prototype of push-pull cylinder type launcher
在联合仿真模型中,Simulink模型中的提拉缸压力被设置为系统变量,并把此状态变量传递给ADAMS虚拟样机,作为虚拟样机模型的输入变量[19]。ADAMS虚拟样机模型解算各部件之间的相互作用力及运动参数,并将提拉杆的速度作为输入变量传递给Simulink模型,如图3所示。
图3 联合仿真数据交换原理Fig.3 Schematic diagram of data exchange in co-simulation
3 发射过程模型的试验验证
3.1 试验系统组成及工作原理
小型原理样机试验系统主要由发射动力组件、模拟雷、测试系统、机架组成。发射动力组件为模拟雷提供发射动力,主要包括气瓶(规格为最大压力5 MPa、最大容积5 L)、电磁阀、管路接头、供气软管和提拉缸(SC63-700标准气缸,最大压力1.5 MPa)等。模拟雷由PVC管和不同密度的填充材料组成。测试系统包括位移传感器(量程1 500 mm、精度0.5‰)、压力传感器(量程2.5 MPa、精度2.5‰)、数据采集软件等,主要负责检测和记录系统工作时的各种参数。机架用于承受发射过程中的后坐力以及为其他部件提供支座。试验系统的实物组成如图4、图5所示。
图4 小型原理样机试验系统Fig.4 Scaled prototype testing system
图5 数据采集软件界面Fig.5 Interface of data acquisition software
试验前用空气压缩机为供气气瓶充满气体,将气缸拉杆推到最后端,在模拟雷运动导轨上放好模拟雷,各测试组件准备好后即可开展试验。试验开始时,计算机给电磁阀发出开始指令,气瓶气体通过供气软管进入提拉缸,提拉缸在气体压力下开始带动拉杆运动,拉杆带动提拉横梁拉动模拟雷向前运动,同时各种测量仪器工作,通过数据采集卡传到计算进行储存和处理,当设定工作时间结束时,由计算机向电磁阀发出关闭指令,电磁阀关闭,气瓶停止向气缸供气,试验结束。
3.2 模型的试验验证
试验系统的相关参数如表1。为了验证模型的正确性,将试验相关参数代入仿真模型,得到相同条件下气瓶压力、提拉缸压力、模拟雷位移及速度曲线。仿真曲线与试验曲线对比如图6~图9所示其中,lT为鱼雷行程,vT为鱼雷速度。
表1 试验参数表
图6 气瓶压力Fig.6 Cylinder pressure
图7 提拉缸压力Fig.7 Pressure of push-pull cylinder
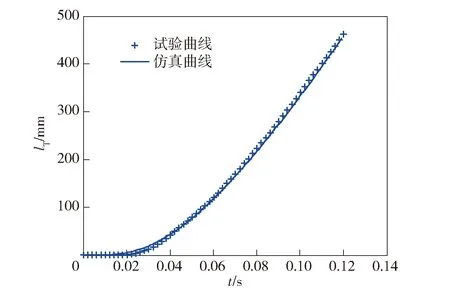
图8 模拟雷行程Fig.8 Moving distance of simulated torpedo
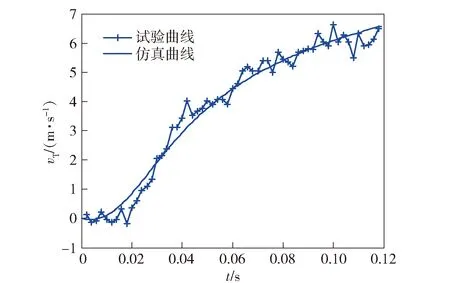
图9 模拟雷速度Fig.9 Speed of simulated torpedo
由仿真曲线和试验曲线对比可知,仿真值和试验值变化趋势相同,大小基本一致。其中:气瓶压力、提拉缸压力、鱼雷行程偏差较小,气瓶压力偏差最大为0.068 MPa,误差0.8%;提拉缸内压力偏差在0.2 MPa以内,误差为4.6%;鱼雷行程偏差约为0.01 m,误差为2%;鱼雷速度偏差在0.3~1.0 m/s左右,最大误差14%,这是由于气体在流动过程中的沿程损失、气缸的密封泄漏、气缸与外界的传热、阀门在开启过程中的非线性以及机械装置的摩擦等多方面因素影响的结果。
从总体上看,所建立的仿真模型能够基本上反映发射系统的发射规律,验证了发射过程动力学联合仿真模型的合理性。
4 发射过程分析
4.1 模型的参数设置
为了分析提拉缸式鱼雷发射装置的发射效果,需要对发射过程中的动力学模型的相关参数值进行设定,并确定其变量的初始值,具体参数设定及初始值如表2、表3所示。

表2 仿真参数设定值

表3 变量初始值
4.2 仿真结果分析
在仿真参数下,运行联合仿真文件,仿真结果如图10~图16所示。
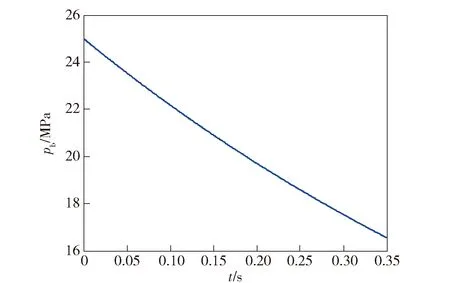
图10 气瓶压力Fig.10 Cylinder pressure
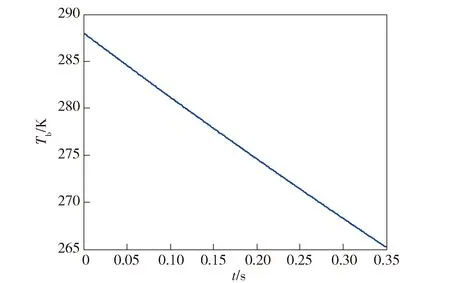
图11 气瓶温度Fig.11 Cylinder temperature
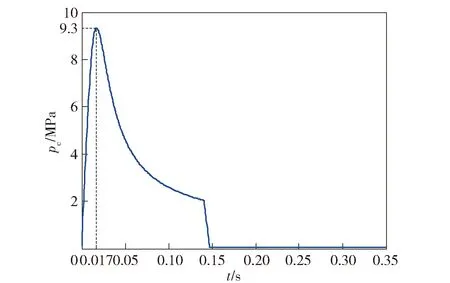
图12 提拉缸压力Fig.12 Pressure of push-pull cylinder
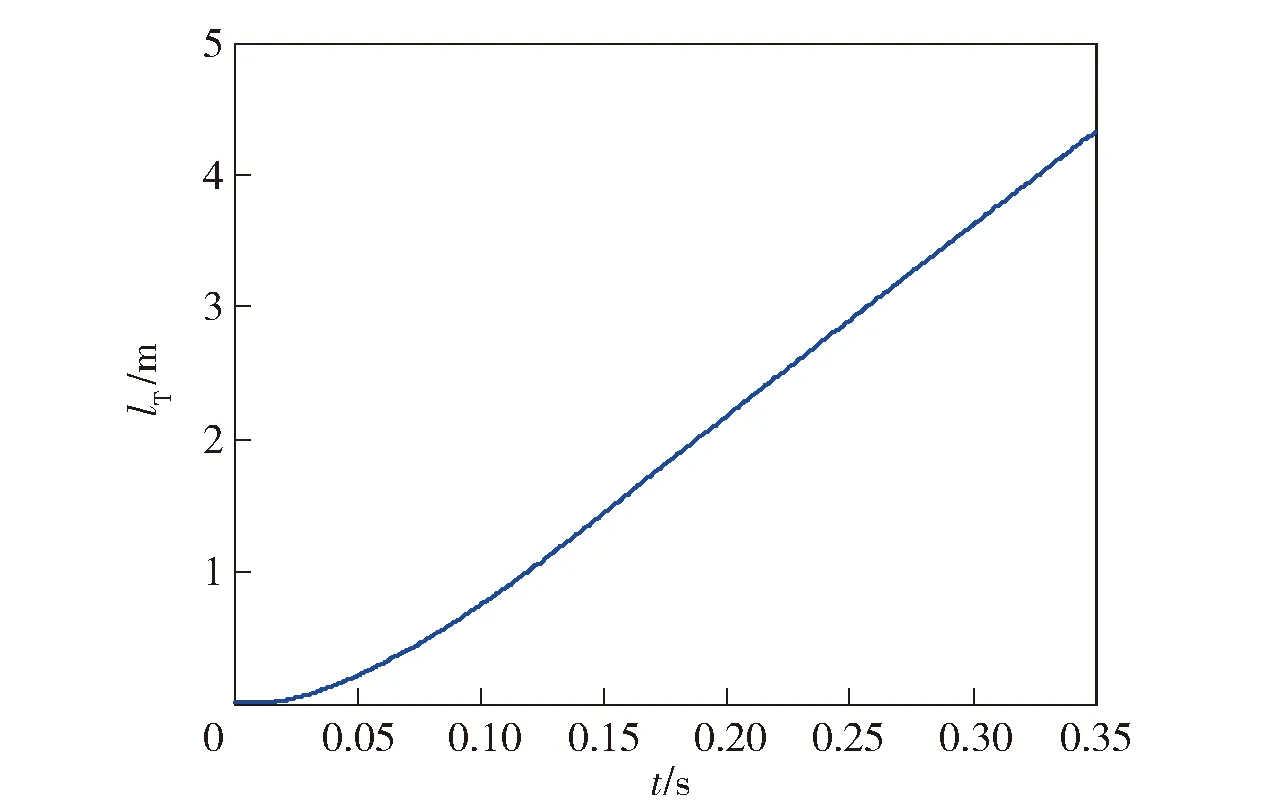
图13 鱼雷行程Fig.13 Moving distance of torpedo
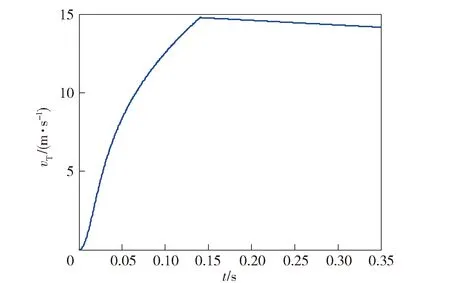
图14 鱼雷速度Fig.14 Speed of torpedo
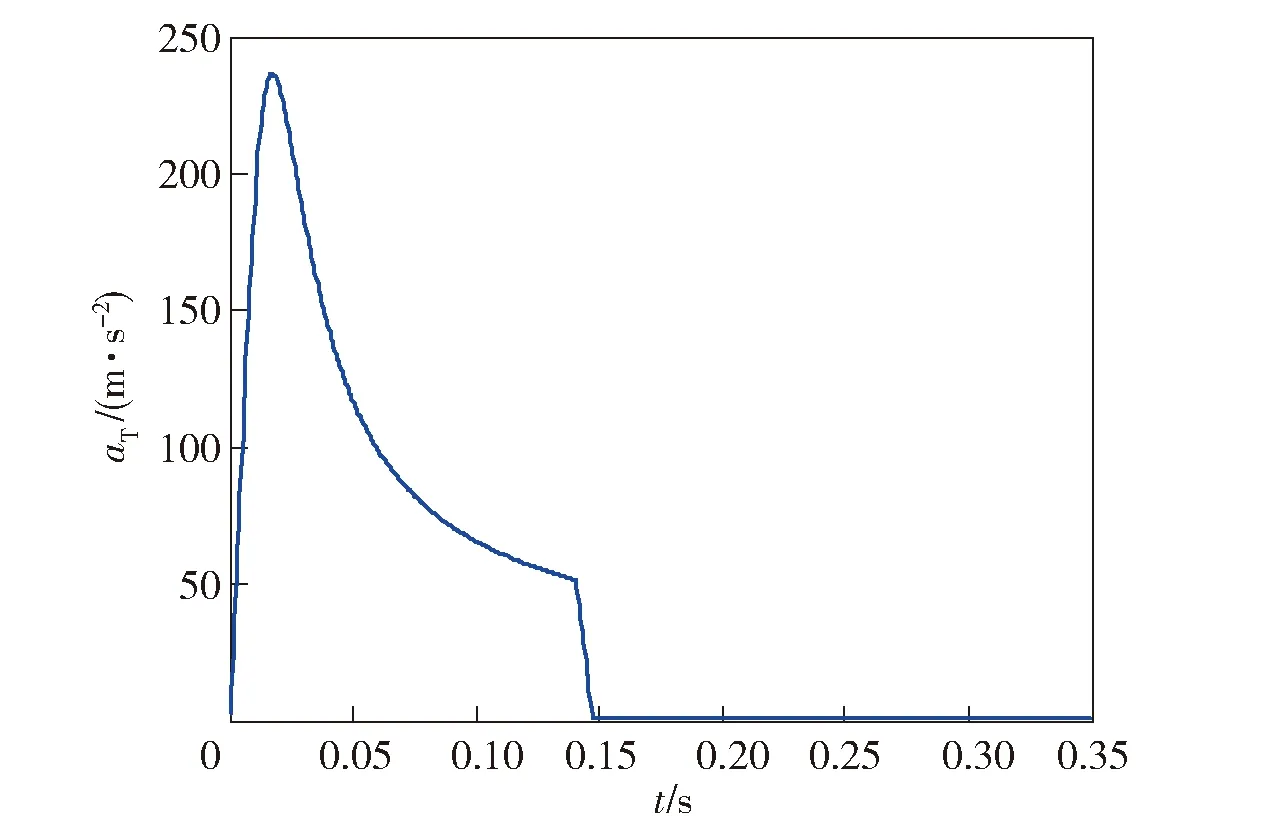
图15 鱼雷加速度Fig.15 Acceleration of torpedo
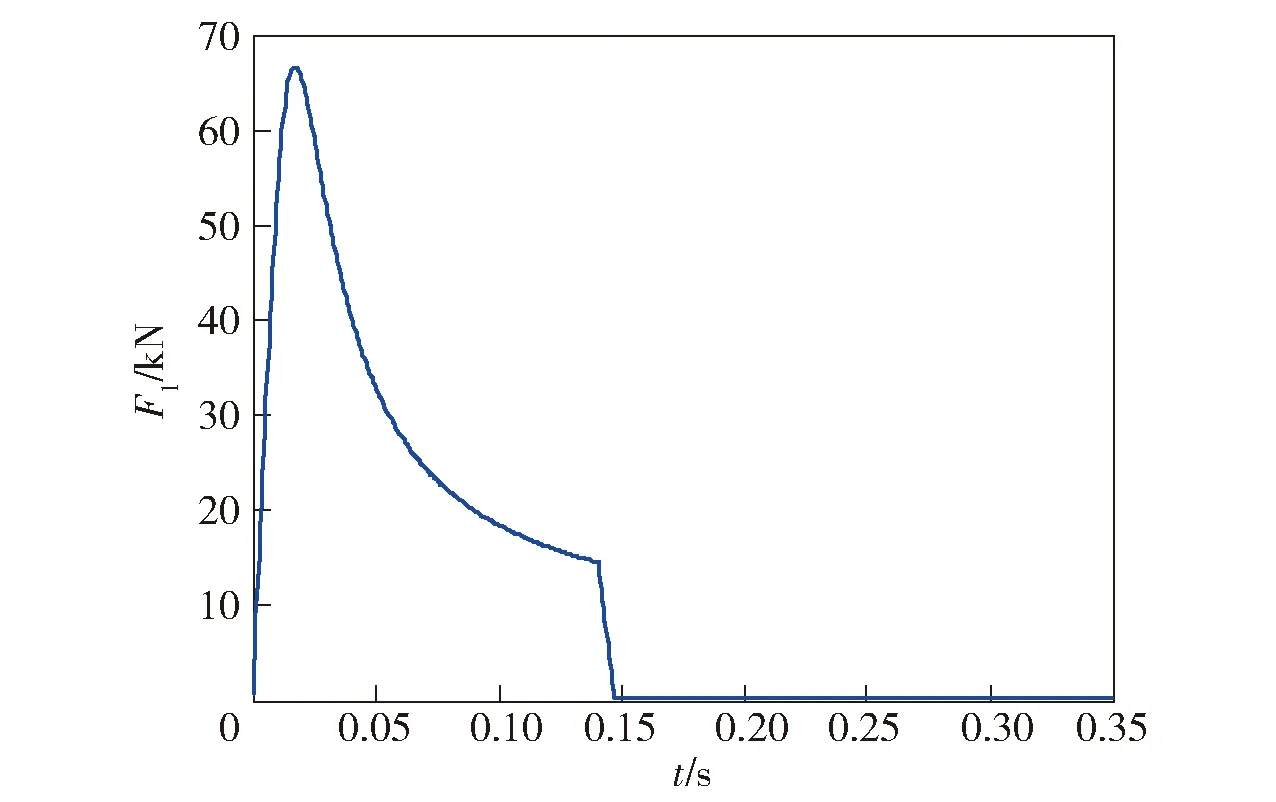
图16 提拉缸和箱体的接触力Fig.16 Contact force between cylinder and box
由仿真结果可知:
1)发射开始后,在0~0.005 s区间内鱼雷位移没有发生变化,燃烧室压力和提拉缸内压力迅速上升,当提拉缸产生的拉力达到足以克服鱼雷与支架滚轮之间的摩擦力时,鱼雷开始向前运动(如图13)。在0.017 s时提拉缸内压力达到9.3 MPa(如图12),活塞在高压空气的推动下克服摩擦阻力通过提拉杆传导对鱼雷做功,随着提拉缸活塞继续向前运动,提拉缸内空间增大提拉缸内压力逐渐降低。在0.14 s时刻,活塞位移达到1.3 m(如图13),活塞运动到提拉缸前部,受到缓冲筒作用停止前进,推筒和鱼雷组合体与提拉杆分离,提拉缸内气体由提拉缸前侧排气孔排出,提拉缸内压力迅速降到常压,随着发射阀关闭,气瓶压力不再变化。
2)发射过程中,提拉缸峰值压力为9.3 MPa,气瓶压力下降3.85 MPa(如图10),气瓶温度下降9.5 ℃(如图11),整个装置零部件间最大接触力Fl为66.6 kN(如图16)。
3)鱼雷出管速度vT达到14.7 m/s(如图14),发射过程最大加速度aT为236 m/s2(如图15),整个发射过程耗时0.14 s(如图13),与意大利ILAS-3鱼雷发射装置发射内弹道相当(发射气压为10~15 MPa,鱼雷出管速度相应的为16~20 m/s)[3]。
5 结论
为研究水面舰艇提拉缸式鱼雷发射装置的可行性,对发射装置高压空气发射过程进行了理论建模与仿真分析,并加工了小型原理样机进行了试验研究。得到主要结论如下:
1) 提拉缸式鱼雷发射装置方案能够有效解决水面舰艇鱼雷发射作战准备时间长,载弹保障能力差的问题。
2) 提拉缸式鱼雷发射装置空气发射过程动力学模型仿真结果与试验结果一致,验证了模型的正确性。
3) 仿真分析和小型原理样机试验结果验证了以提拉缸为动力组件的轻型鱼雷发射方案在工作原理是可行的。
4) 所建的模型及所取得的结构参数可为后续的发射装置总体方案论证及技术设计提供参考。