超空泡航行体运动过程流体动力特性试验研究
2019-12-23时素果王亚东杨晓光刘乐华
时素果, 王亚东, 杨晓光, 刘乐华
(北京机电工程研究所, 北京 100074)
0 引言
超空泡技术是可以实现水下航行体高速航行的新途径,其原理是利用航行体表面的气层避免周围液体与航行体表面接触,减少沾湿面积,从而大幅降低了粘性阻力,导致航行体阻力可以达到相当于空气中的量级,从而使得航行体运动速度大大提高。为了更好地控制超空泡流动,保证航行体运动的稳定性,一般会采用主动通气方式,但同时也使得流动更为复杂,涉及多相、非定常、高湍流、相变等诸多流体动力学难点问题。空泡流场直接决定流体动力,为了掌握超空泡航行体的流体动力特性,急需开展研究,试验成为分析该现象直接且主要的研究手段。
在20世纪50年代前苏联最早开始了超空泡流动试验的研究,Reichardt[1]首次提出采用人工通气方式来生成超空泡,其原理是通过增加泡内压力降低空化数来生成通气超空泡,很多学者采用这种方法来降低空化数,发现相同空化数下的自然与通气超空泡存在相似的空泡形态与流体动力特性,建立了与空化数相关的空泡形态半经验公式。Kirschner等[2-3]通过试验方法对通气和自然超空泡的流场和流体动力特性进行比较,进一步验证了上述结论的正确性。Savchenko[4-5]通过大量的约束模试验和水洞试验研究了超空泡形态和流体动力特性,获得了不同速度和通气等条件下的空泡和流体动力变化规律。Arndt等[6]开展了带尾舵的超空泡航行体流体动力性能研究,分析了尾舵沾湿、尾舵舵角对航行体流体动力的影响,研究了尾舵与空泡间相互作用,给出了在尾舵舵角增加时预想达到相同空化数所需通气量增大的结论。
国内虽然对通气超空泡流动研究起步较晚,但近年来也对该流动进行了大量研究。段磊等[7]、王志等[8]通过粒子成像测速(PIV)的方法研究了通气超空泡的内部流场结构,分析了通气下速度和涡量场的变化规律,获得了内部气体的流动速度;贾力平等[9]、蒋增辉等[10]在水洞中开展了通气超空泡流动试验研究,分析了空化器参数对空泡形态的影响规律,掌握了超空泡航行体尾部力和力矩变化特性,获得了不同攻角下的尾部流体动力特性;易淑群等[11-12]通过约束模试验开展了攻角对加速运动中超空泡形态的影响研究,在零攻角和小攻角条件下,获得了加速运动过程空泡形态演变规律,同时证明适当的通气可以在略大的自然空化数下形成超空泡;顾建农[13]在高速水洞中对3种典型头型下通气空泡特性进行了研究,获得了3种头体在不同空泡数下的空泡形态和阻力特性,分析了通气流量空泡形态与阻力的影响规律;王科燕等对超空泡状态下锥形空化器、尾翼、扩张尾裙等的流体动力特性进行了水洞试验研究,分析了通气量对特定外形下空泡流场和流体动力的影响,获得了不同空泡穿刺下尾翼流体动力特性,给出了扩张尾裙的力系数随着尾裙底径半锥角的增大而增大等结论[14-16]。
由此可知,上述研究成果大多基于水洞试验或约束模试验,无法避免由于来流速度较低、弗劳德数较小而导致的明显空泡上漂对流体动力产生的影响,也无法避免试验模型支撑对于空泡流场和流体动力测量的偏差,且无法说明真实的超空泡航行体运动过程流体动力特性是否能够通过固定状态的水洞或约束模试验反映或者反映到何种程度,因此,急需开展高速自由航行试验,获取超空泡航行体最为真实状态下的流体动力特性。
本文通过建立的一套水下高速航行的试验装置,在水池中开展了航行体自由航行试验,通过高速摄像机、压力传感器和内测装置测量并分别获得了空泡演化、表面压力和流体动力,基于上述试验数据阐述了水下航行体高速运动中力的变化特性,分析了力产生变化原因。
1 试验装置与方法
超空泡航行体高速运动过程水池试验示意图如图1所示。试验时,通过发射架上下调节发射管深度,将其安放在试验要求的水深,再将发射管内安装试验模型,根据水下航行体运动初始速度,发射炮设计不同的发射压力,启动发射炮,试验模型按照设定的速度开始运动,通过高速摄像系统、压力传感器、内测装置同步测量,可获得空泡流场、表面压力以及运动姿态,间接获得流体动力,航行体高速航行一段距离后,在局部空泡出现之前,试验模型将被回收。
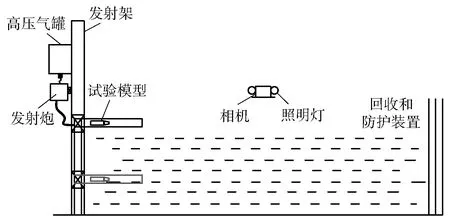
图1 超空泡航行体高速运动过程水池试验示意图Fig.1 Schematic diagram of high-speed free motion of supercavitating vehicle in a pool
在上述试验场地及设备中,水池长、宽和高分别为70 m、44 m、10 m;为避免在试验过程中试验模型撞击水池底部或壁面,从而对其破坏,回收装置采用悬挂钢板方式; 发射装置包括发射炮、发射架和高压气体压缩机3部分,发射炮管(内径0.1 m,长6 m)管口设置有隔水薄膜,其工作原理为:管上安装有压力表和阀门,压力表设定标定气压强度,通过阀门将一定量的氮气注入炮管有限体积内,使试验模型在恒定气压的持续作用下经发射炮管加速至设定速度后冲破气膜冲入水池。
在测量开始前,定义坐标系,地面坐标系Oxyz以发射点为O点,弹体坐标系Oxyz建立于航行体质心,起始运动时刻,地面坐标系和弹体坐标系O点重合。
内测装置也称6自由度运动系统,经过模块化设计,3个方向加速度计延长线与主板相连接,并通过螺钉刚性连接于内测支架上,有利于避免电路板自身振动对采集数据的影响。内测装置主要技术指标为:加速度量程70g;角速率陀螺量程2 000°/s;采样精度16位;采样频率3 000 Hz(6通道同步);容量128 000 Bytes,可保存约3.5 s的数据,保证运动过程数据的存储。
压力传感器也称压力测量系统,采用北京约克仪器公司生产的XCL-072系列压力传感器。压力传感器主要技术指标为:量程精度345.45 kPa;过载压力精度200%;采样精度16位;采样频率6 500 Hz;容量精度130 000 Bytes,可保存约2 s的压力数据。
高速摄像机也称高速摄像系统,采用美国REDLAKE 公司HG-100K 型号,摄像机内存为4 GB,记录速度至少为1 000帧/s,满足运动过程动态摄像要求。
为了实现航行体头部向空泡内通气的功能,选择碳纤维气瓶(尺寸为φ62 mm×300 mm,额定压力为30 000 kPa,容积为0.5 L),布放在模型内部。试验前将瓶内充入一定压力(≤10 000 kPa)的气体后,密封完好的装入试验模型内部,在航行体开始运动时刻,通过重块撞击惯性阀打开通气管路,向航行体前端通气孔内流入高压气体,形成空泡。
2 试验模型
为了开展此次试验,根据超空泡流型要求,设计了试验模型,总质量为7.6 kg,总长为0.8 m,圆柱段直径为0.1 m,前端面直径为0.035 2 m,具体尺寸及结构见图2,为了测量压力,在试验模型尾部互为180°处布置2个压力传感器,具体位置见图3.
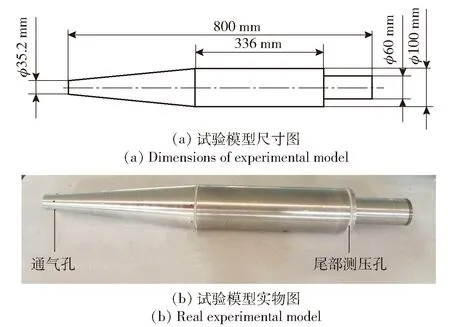
图2 试验模型实物和尺寸图Fig.2 Real experimental model and its dimensions
图3 压力传感器安装位置图Fig.3 Mounting position of pressure sensors
主要无量纲参数轴向力系数Cx、法向力系数Cy,分别定义如下:
(1)
(2)
式中:Fx和Fy分别是航行体所受到的轴向力和法向力;u为超空泡航行体运动过程不断变化的速度;Ac是圆柱段面积;ρw为水的密度。
3 试验结果分析
为了研究超空泡航行体运动过程中流体动力特性,开展了超空泡航行体以速度60 m/s、0°舵角、0°攻角、通气体积流量1.2 m3/s下的自由航行试验,图4给出了超空泡航行体高速运动过程中轴向力和法向力系数随时间变化曲线,其中,在0.15 s之前,是在发射炮管内运动,轴向力和法向力系数受到炮管高压气体推动及与炮管碰撞影响,因此,不能用来分析超空泡航行体运动过程力变化。同时,由于试验工况是自由航行,本文中的流体动力不仅包括绕流的位置力,还包含惯性力。
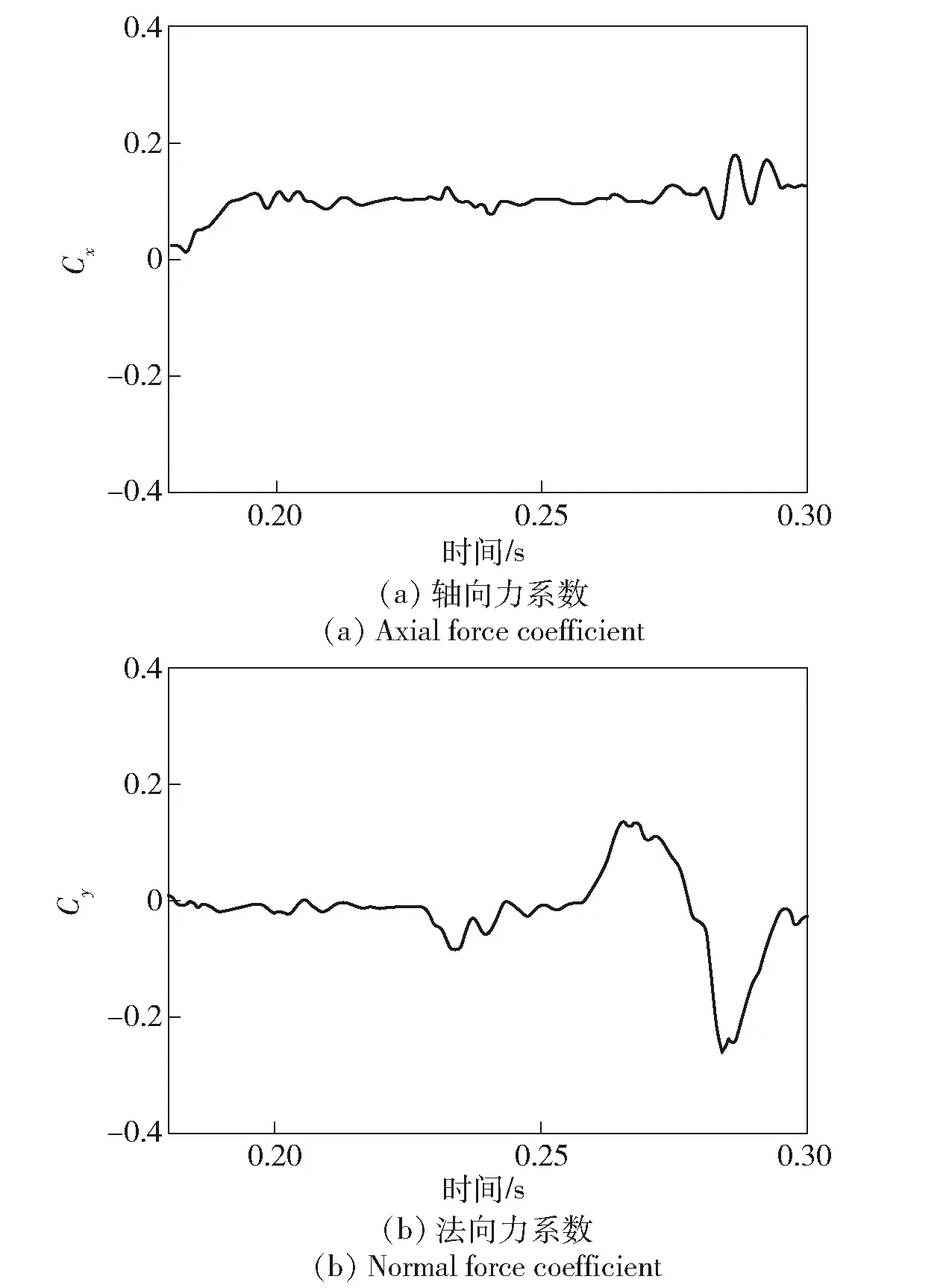
图4 超空泡航行体运动过程中轴向力和法向力系数变化曲线Fig.4 Axial and normal force coefficients during high-speed motion
分析图4中曲线可知,在超空泡航行体运动过程中,轴向力系数不是一定值,在平均值附近小幅波动,其值约为0.1,在运动后期平均轴向力系数有所增加。对于法向力系数,与轴向力系数变化规律一致,在运动初期,法向力系数在0附近小幅波动,主要是由于航行体做无攻角和无舵角下的直航运动,随着时间推移,法向力系数在运动过程中出现了周期性变化现象,变化周期约为0.055 s.
流场演变决定流体动力特性,为了分析超空泡航行体运动过程流体动力变化的原因,图5给出了超空泡航行体运动过程6个典型时刻的空泡形态图,由于拍摄技术限制,只给出了侧上方空泡形态演变过程,无法给出所有与曲线对应特征时刻的空泡图。图6给出了高速运动过程超空泡航行体尾部上下对称位置处的表面压力曲线,图7和图8分别给出了超空泡航行体运动过程中俯仰角和速度变化曲线。由于本次自由航行为直线运动,速度较高,惯性较大,其他方向运动不明显,这里只分析纵平面运动。
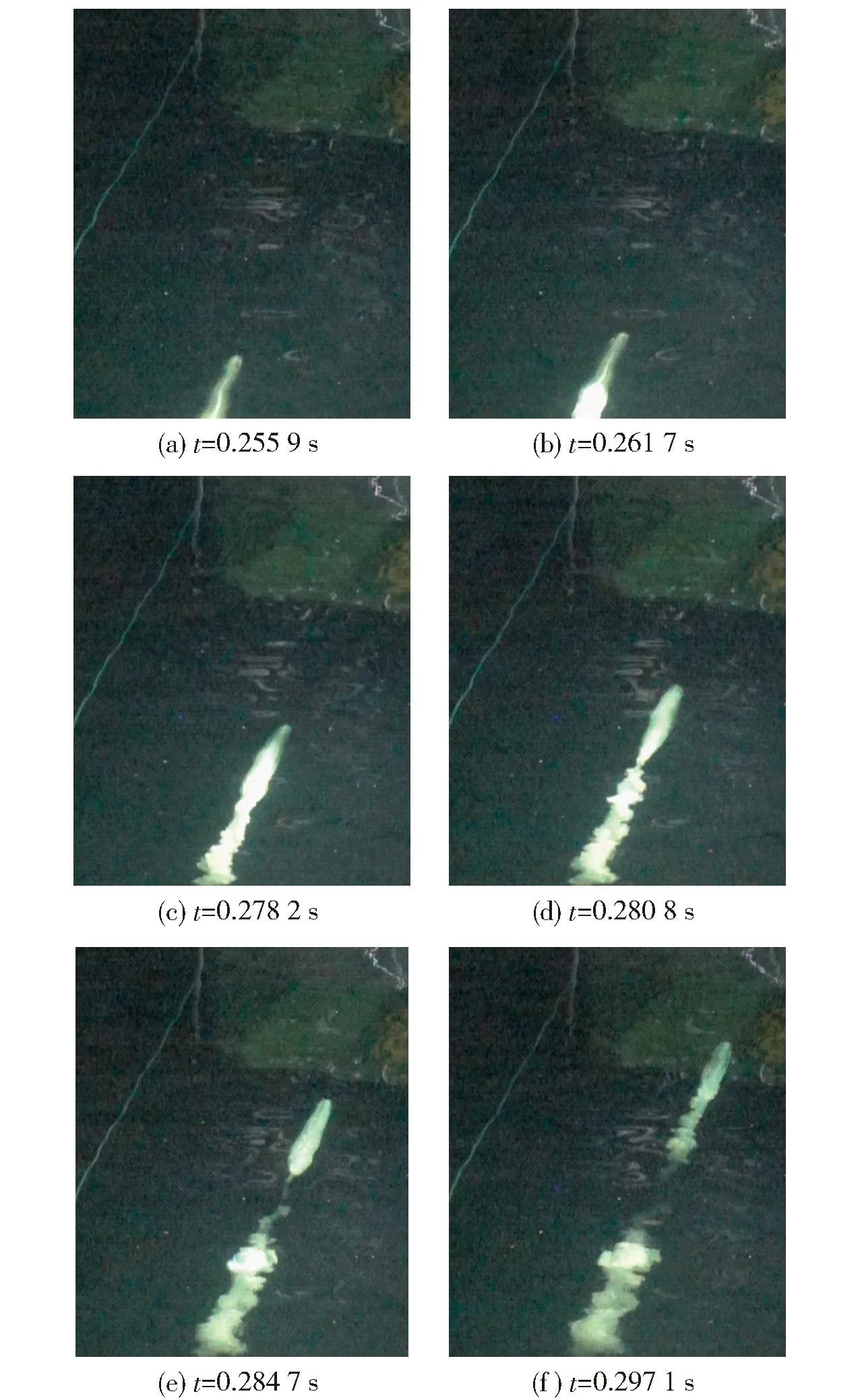
图5 超空泡航行体自由运动过程中空泡形态变化Fig.5 Morphological changes of supercavity during motion
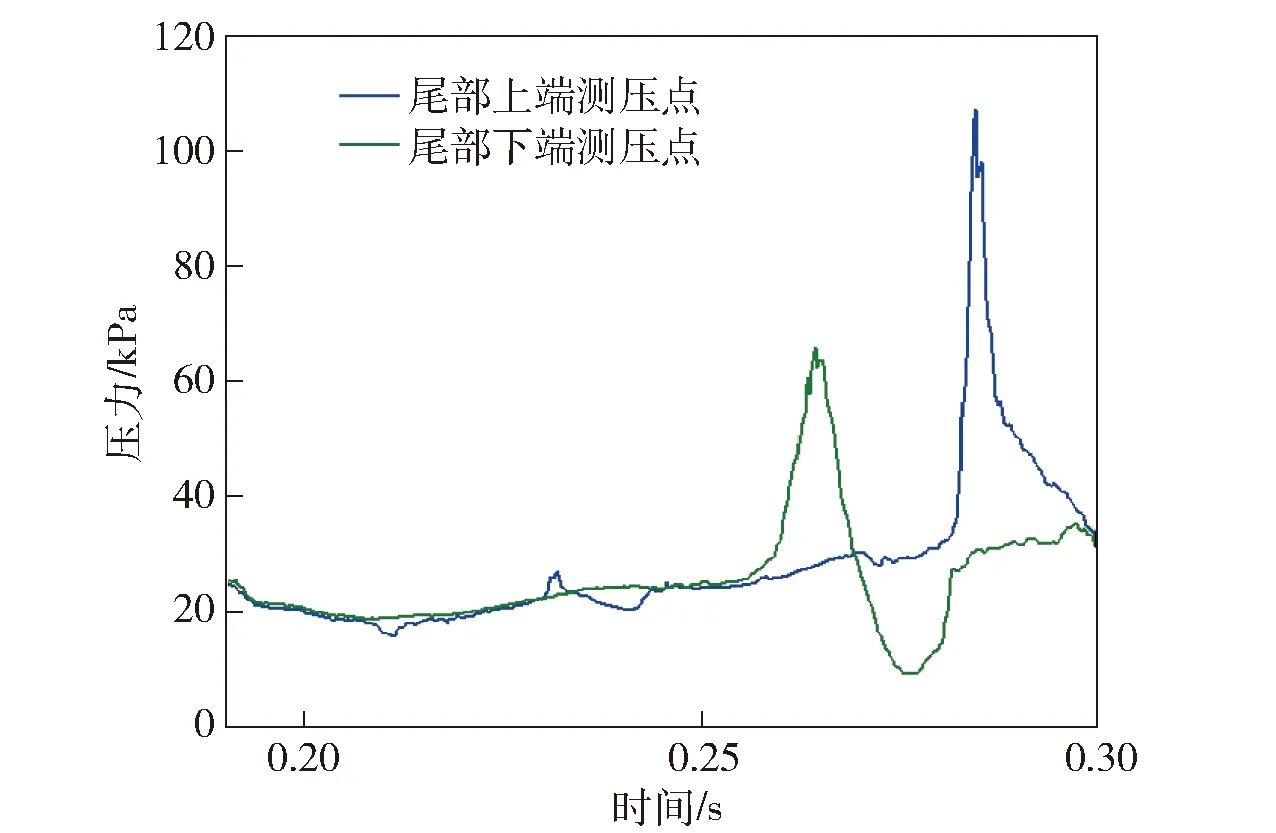
图6 高速运动过程中超空泡航行体尾部上下对称位置处的表面压力曲线Fig.6 Surface pressures at symmetrical positions above and below the tail of supercavitating vehicle during high-speed motion
结合图7和图8,详细分析了图5和图6中的空泡形态和尾部表面压力演变过程,发现在运动起始,航行体姿态变化较小,随着时间推移,姿态开始发生变化,在0.255 9 s时俯仰角产生一较大低头动作,但从尾部上下端压力相差较小可看出空泡形态对称性较好,并未与空泡壁相碰撞,航行体被空泡完全包裹,轴向力和法向力系数小幅波动,平均值分别为0.1和0,但0.275 0 s之后轴向力系数因速度降低和空泡减小有所升高。
随着时间推移,在重力等干扰因素下,空泡形态和尾部表面压力差别开始变大。从空泡形态图上看:在0.261 7 s时,航行体上端表现为一透明空泡,此时观察不到下端空泡形态,从俯仰角曲线上看,航行体为正俯仰角,做抬头动作,但从压力曲线图上可以发现,此时尾部上下端表面压力上下不对称,且不对称性不断增大;在约0.265 0 s时,尾部下端撞击空泡壁,尾部下表面压力出现峰值,尾部上端压力与稳定空泡内一致,上下压差导致法向力系数增大并达到最大值,法向力产生的恢复力矩使得航行体做低头动作,见图7,航行体尾部向上运动,运动一定时间,尾部上端撞击空泡壁,尾部上端开始出现气体与液体(简称气液)混合区,随着时间推移,俯仰角越大,尾部撞击空泡壁面积越大,尾部上端非定常气液混合区不断增大;在约0.280 8 s时,航行体被气液混合区域包裹,尾部上端沾湿区最大,压力曲线图上显示,上表面压力达到最大,下端压力与稳定空泡内压力一致,法向力系数反向较大。同样,法向力产生的恢复力矩使得航行体尾部向下运动,在俯仰角曲线图上也能看出,航行体头部与锥段重新被透明空泡所包裹,仅航行体尾部处于非定常气液混合区,见0.297 1 s 空泡形态,之后航行体尾部继续向下运动,航行体上部全被透明空泡包裹,尾部上下压力曲线相差变小,法向力系数变小在0附近,完成了一个周期的空泡形态变化,导致了压力曲线的周期性变化,从而引起法向力系数相应的周期变化,超空泡航行体运动过程中尾部上下周期性振荡的这种现象被称为尾拍效应。由于试验条件有限,本次试验只获得了一个周期的尾部上下运动。
因此,尾部上下壁面压力也表现出与空泡形态一致的周期变化特性,超空泡基本上包裹整个航行体,只在航行体尾部不断运动撞击空泡壁时局部出现沾湿区域,是产生法向力的主要来源。
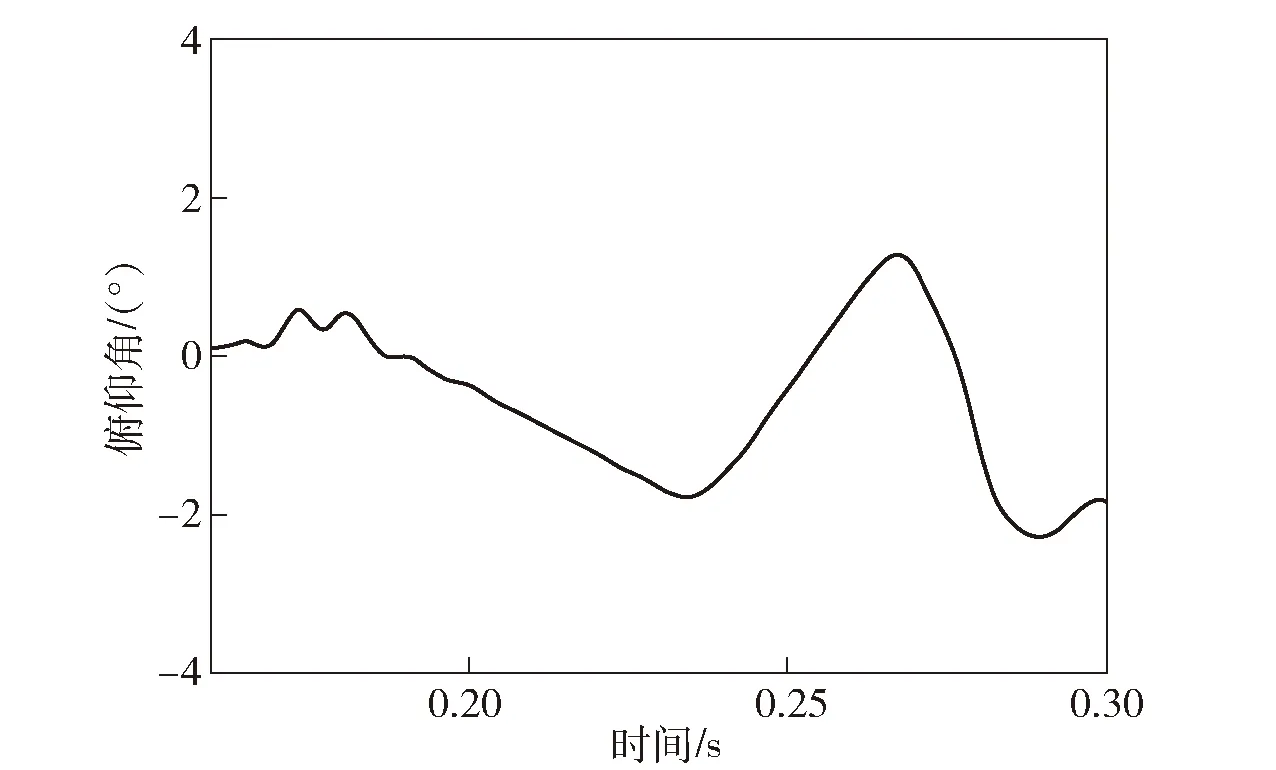
图7 超空泡航行体高速运动过程中俯仰角变化曲线Fig.7 Changing curve of pitch angle of supercavitating vehicle during motion
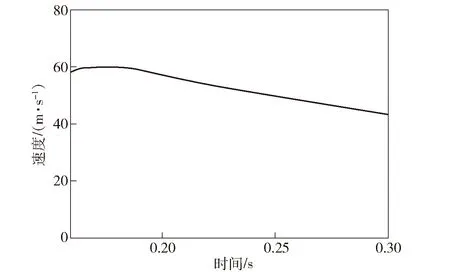
图8 超空泡航行体运动过程中速度变化曲线Fig.8 Speed variation curve of supercavitating vehicle
从图6中还可发现,压力峰值出现时刻略早于俯仰角最大值时刻,出现这种现象与压力传感器安装位置有关,直接关系到安装传感器位置的触水时刻。同时,在运动过程中,航行体尾部上下撞击空泡壁时压力峰值不同,最开始航行体尾部上端撞击空泡壁面时压力幅值较小,主要是因为此时包裹航行体的空泡受尾气影响,泡比较饱满,航行体具有较大的自由摆动空间,之后随着时间推移,受速度、通气等影响,导致空泡饱满度变化,使得压力幅值变化。
综合上述结果,总结流体动力周期性变化机制,在重力等因素影响下使得航行体尾部上下表面压力不对称,产生法向力,且这种压力不对称不断增大,达到一定程度时,尾部撞击空泡壁,产生的恢复力矩使得航行体尾部向相反方向运动,于是出现了航行体尾部上下周期性拍动现象,导致流体动力相应的周期变化,这从空泡气液混合区、压力峰值、法向力绝对值峰值、俯仰角峰值出现时刻,以及空泡、压力和法向力变化周期基本一致也可知。
4 结论
为分析超空泡航行体真实运动过程中流体动力特性,开展了超空泡航行体自由航行过程试验研究,获得以下结论:
1)在超空泡航行体运动过程中,轴向力系数不是一定值,在某一定值范围内小幅度波动,平均值基本不变,只是在运动后期平均轴向力系数因为速度降低和空泡尺寸减小而有所增加;在运动起始,法向力系数在0附近小幅度波动,随着时间推移,法向力系数出现了周期性振荡,变化周期约为0.055 s.
2)在重力等因素影响下使得航行体尾部上下表面压力不对称,产生法向力,且这种压力不对称不断增大,达到一定程度时,尾部撞击空泡壁,产生的恢复力矩使得航行体尾部向相反方向运动,于是出现了航行体尾部上下周期性拍动现象,称为尾拍效应,流场周期性的演变直接导致了法向力系数周期性变化。