无人系统自组织集群网络中网关选举方法研究*
2019-12-04范喜全白维学毛建兵
范喜全,白维学,毛建兵
(1.中国人民解放军32180部队,北京 100039;2.中国电子科技集团公司第三十研究所, 四川 成都 610041)
0 引 言
无人系统是影响未来战争制胜机理的颠覆性技术,而集群化是无人系统的重要发展方向[1]。无人系统集群是指数十或数百套无人系统像“蜂群”那样成群结队执行任务,在局部区域迅速集结形成大规模作战装备优势,显著提高作战效能。未来战场空间将出现多种类型的无人系统大规模地联合开展作战行动,这些不同类型的无人系统将首先构成一个个的小群体,由小群体再联合形成更大规模的作战群体[2]。
无人系统集群网络中“蜂群”数量动态可变,故其一般采用分层分群的网络结构设计,如图1所示。第一层为面向任务子群内成员间通信的网络,第二层为面向子群间通信的网络,第二层网络中的节点由第一层网络中节点动态自适应选举产生,实现各个子群之间的互联互通,因此也称子群间网络为“互联群”[3]。
实现子群间互联的关键就在于子群间网关节点的动态选举,动态网关选举主要包括邻居子网发现、多点信号侦听分离、基于序列的相关能量检测和网关节点选取四部分组成[4]。

图1 无人系统集群网络分层网络结构
1 邻居子网发现机制
一级子网的建立将根据作者规划的任务子群自动建立,二级子网则需要由一级子网中的节点根据自身的能力和条件,有选择地“站出来”承担起子网间的通信任务。二级子网只有在有邻居子网存在的时候才会主动建立,因此需要一种适当的邻居子网发现机制。
无人系统自组织网络采用多信道分级网络结构,不同子网工作在不同的信道上,为了能够发现邻居子网,二级子网和每个一级子网共同拥有一个基本持有信道,简称为BCH信道(Basic Hold Channel)。
在BHC信道的时针结构中,设计了数个子群探测(Detect)子时隙,每个一级子网对应一个Detect子时隙,每个一级子网的所有节点共同占用一个相同的Detect子时隙,如图2所示。在属于某个一级子网的Detect子时隙,本子网内所有节点在BCH信道执行信号发送;在属于其它一级子网的Detect子时隙,本子网所有节点切换到BCH信道执行侦听和接收处理,以判断是否有目标子网存在。

图2 邻居子网探测发现设计
2 多点信号侦听分离
邻居子网发现机制让子网内所有节点在同一个Detect子时隙内同时执行发送操作,因此侦听接收节点将收到多个节点同时发送的信号,信号存在混叠的可能。如图3所示,节点c和d同时在Detect子时隙内发送,侦听节点a和b根据所处位置通信条件不同,节点a仅收到来自节点c的信号,而节点b可能同时接收到来自节点c和d的叠加信号。

图3 子网探测时隙侦听接收
侦听节点通过接收处理Detect子时隙信号可以实现两个目的:
1)判断邻居子网的存在性;
2)评估预期链路质量。
经研究分析可知,要达成目标1),可以通过简单的能量检测方式实现,该方法对是否存储信号混叠并不敏感。要达成目标2),可以通过将信号能量强度作为评估链路信噪比的依据来实现,但这种方法对信号混叠导致能量增强会形成误判。如图3中,若节点a侦听接收c的能量比节点b单独侦听接收节点c或d的强,但节点b侦听接收节点c和d的能量叠加后比节点a侦听接收c的强,这可能使得网络误判认为节点b更适合用于建立两个子网间的通信。
为避免误判,节点侦听接收需要对来自多个节点的信号采用基于序列的相关能量检测技术进行一定程度的分离检测。通过节点发送具有良好相关性的特定序列,接收节点利用相关检测更为准确地提取信号中的能量。如图4、图5所示,通过多点信号侦听分离后的相关峰强度准确判断出适合建立子网间通信的最佳节点。
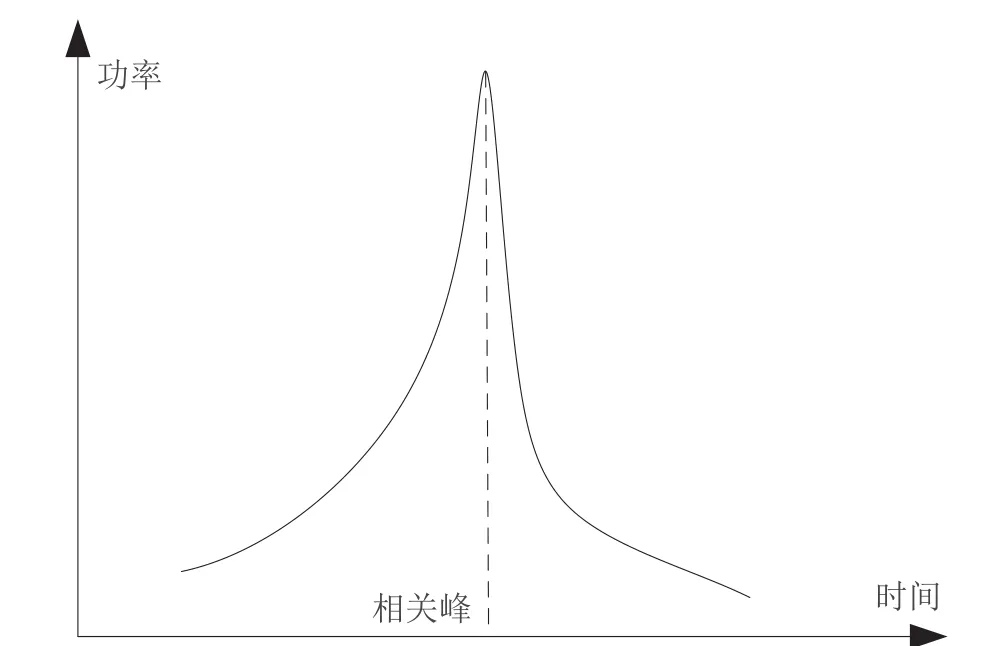
图4 单源信号相关能量检测
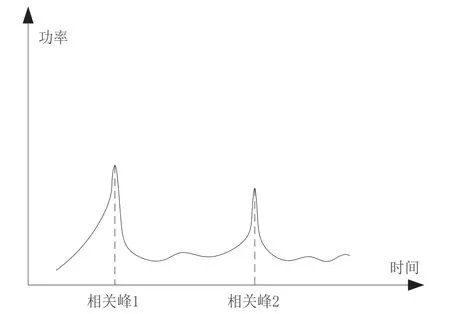
图5 多源信号相关能量检测
3 基于序列的相关能量检测
采用基于训练序列的同步检测技术来实现相关能量的检测[5]。网络中每个节点在Detcet时隙上发射训练序列符号,接收节点可以通过接收信号处理实现符号同步,同时实现相关能量的检测,训练序列采用ZC(Zadoff-Chu)序列,ZC序列的定义为:

其中,μ为ZC序列的根指数,不同的根指数条件下,ZC序列的自相关峰均值比有较大不同。通过仿真分析发现,根指数为720时,可达到最大的自相关峰均值比,如图6所示。故根指数设置为720[6]。

图6 ZC序列不同根指数峰均值比
4 网关节点选取
当不同的任务子群子网工作的地理区域在同一区域或较近时,不同子网在位置空间上存在较大的重合,主要典型的应用场景有地域空间高度重合场景(分为集结和覆盖两种样式)和扁平分散边缘邻接场景(分为围合和广泛两种样式),如图7、图8所示。

图7 地域空间高度重合场景

图8 扁平分散边缘邻接场景
由于子网间位置空间上的重合,通过上述邻居子网发现机制,网络中将可能有大量的节点发现其它邻居子网的存在,如果不加以选择控制,大量的节点都参与到二级子网的建立中去,将造成二级子网拥塞甚至瘫痪,严重浪费有限的信道资源,网络分层分级的意义也将失去殆尽,难以取得良好的效益。因此,必须要在邻居子网发现的基础上对有条件的节点进行选择控制[7]。
子网互联网关节点选取的规则设计如下:
规则1:优先选择同时侦听发现了更多邻居子网的节点;
规则2:优先选择信号侦听检测中相关能量最强的节点;
规则3:面向每一个邻接子群子网,同等条件下尽量避免同一子网两跳范围内的节点同时成为互联通信的二级子网节点;
规则4:与同一子群网络连接的节点原则上不易过多,但当网络间通信业务强度增加而使得当前网络资源不足时,适当增加连接的节点数。
子网节点发现邻居子网后,通过基于相关序列的能量检测,并进行多点侦听分离后,依据以上四个规则,完成子网间网关节点的选择,从而实现多子网的互联互通[8]。
5 结 语
无人系统在未来军事发展中具有广泛的应用需求,而集群化是无人系统的重要发展方向。无人系统集群技术通过聚合大规模低成本小型无人系统,形成大型无人系统,可有效增加战斗中传感器和攻击武器的数量,形成规模优势,提高作战效能。无人系统的集群化将使得网络不仅要解决可靠、大容量自组织及可配置网络等问题,而且要根据无人集群特性,实现高速高动态拓扑变化的自主组网、高实时信息传输。
通常应用中,无线网络分为平面网络结构和分级网络结构两大类。平面网络结构中所有节点具有系统的级别权限和路由机制,易于组织且健壮性强,但随着节点数量的增加其路由信息的交互量成指数级上涨,会导致节点处理能力不足,资源过度消耗,故其主要适用于中小型网络。分级网络结构中,按照一定的规则将网络划分为多个组群,其计具有分级、分布式和群组化的特点,特别适用于大规模网络。而实现分级网络的关键是采用高效的网关选举算法选举网关节点来实现各个子群的互联互通。
