基于激光连续扫描的弯曲管路工作变形测试方法
2019-09-17臧朝平张让威王晓伟
张 弓,臧朝平,张让威,李 繁,王晓伟
(1.南京航空航天大学能源与动力学院,南京210016;2.中国航发沈阳发动机研究所,沈阳110015)
0 引言
航空发动机管路一般用于输送燃油、滑油和空气等介质,是航空发动机的重要零件。长期以来,由于受到转子不平衡力和风扇气动激励等外界激励,发动机管路系统一直存在振动故障问题[1]。振动因素是发动机导管及导管支架断裂的主要原因,因此,了解发动机管路的动力学特性,对管路的结构优化设计和防止管路故障的发生具有重要意义。管路的动力学特性测试通常采用传统的接触式加速度传感器或应变片进行。加速度传感器的附加质量会影响测试结果的精度,同时还存在传感器布置测点的数目有限、测点空间的分辨率低和测试信息不完备等缺陷;而应变片粘贴工艺复杂,并且难以测试管路振型,多用来分析管路振动频率。近年来,扫描激光多普勒振动测试技术(Scanning Laser Doppler Vibrometry,SLDV)凭借非接触测试和测试便捷等优点得到发展并被广泛使用。SLDV测试是1种成熟的离散点扫描激光测振技术,可以有效地测试结构频响函数,准确获取结构固有频率、阻尼比及模态振型[2-5]。
虽然SLDV测试可以在一定程度上提高测点的密集程度,但并未从本质上解决测点分辨率低的问题[6],且测试时间较长。在此基础上,研究者提出了连续扫描激光多普勒振动测试技术(Continuous Scanning Laser Doppler Vibrometry,CSLDV)。CSLDV 测试通过控制激光点在试验件表面以连续运动的方式采集振动信号,通过相应的数据处理方法得到试验件测点密集的工作变形(Operational Deflection Shape,ODS)。CSLDV测试在国外起步早,发展较为成熟,已实现了梁[7]、板、圆盘[8]、叶片[9]和圆筒结构[10-11]的连续扫描测试。国内陈强、宋安平等[12-13]实现了板梁结构的试验测试;覃斌、李晖等[14-15]实现了圆筒结构的激光连续扫描振动测试。但是在工程应用中,实际结构较为复杂,大多不是简单的板梁结构,例如航空发动机外部管路具有复杂的弯曲结构,使得激光连续扫描测振技术实用性不强。
本文针对弯曲管路结构,根据曲线激光连续扫描原理,进行了ODS测量和分析,并进行了方法验证。
1 曲线激光连续扫描工作变形测试方法
扫描式激光测振仪在激光前端配有1套轴线正交的扫描镜片,分别由2个电极驱动,作为激光扫描位置的执行机构,如图1所示。镜片的扫描角度由电极的输入电压控制,并且存在一定的线性关系

式中:琢x和琢y为X和Y方向镜片的偏转角度;Vx和Vy为X和Y方向电机的输入电压;S为比例系数。

图1 激光扫描系统
本文使用的扫描式激光测振仪型号为Polytec-PSV-400-3D,其比例系数S=4毅/V。扫描镜片偏转角度决定了激光扫描点的位置,并且一一对应。
曲线扫描路径计算的基础是线段的坐标转换。已知水平线段两端坐标分别为A(x1,0)和B(x2,0),转换后的端点坐标分别为A'(x'1,y'1)和B'(x'2,y'2),2个线段上的点一一对应,点集为映射关系。
转换后的坐标与转换前坐标可表示为线性变换

式中:a1、a2、b1和 b2为转换系数。
将转换前后线段端点坐标带入式(2),得到

表示成矩阵形式为

可求得转换系数为
求得转换系数,即建立了2个点集之间的映射关系。如发动机外部管路中弯管有3段直线和2段弯曲部分,直线部分可在直线两端标记标定点,弯曲部分则需要选择更多的标记点,用多段线段逼近曲线。在曲线扫描中标定点就是进行坐标变换线段的端点,2个标定点之间的区域就是进行坐标变换的线段。弯管UG模型及其选择的标定点如图2所示。

图2 弯管UG模型及其标定点

图3 归一化坐标下标定点和扫描点
在激光线扫描测试中,路径被定义在归一化坐标中,即x缀[-1,1],实际扫描区域为曲线,总的扫描长度为各段扫描线段的总和,记为l,根据每段扫描线段的长度和总长度l,将标定点转换到归一化坐标中在归一化坐标中,标定点和激光扫描点如图3所示。激光为正弦速度扫描,因此激光点之间的距离呈正弦规律变化。
10个标定点将弯管分为9个区间,通过坐标变换前后端点标定点的坐标,分别将9个区间内的归一化坐标激光扫描点变换到实际坐标,得到沿管路的曲线扫描线,如图4所示。后期数据处理所得到的管路工作变形也是在归一化坐标下,同样依此法将归一化工作变形转换为实际坐标工作变形。
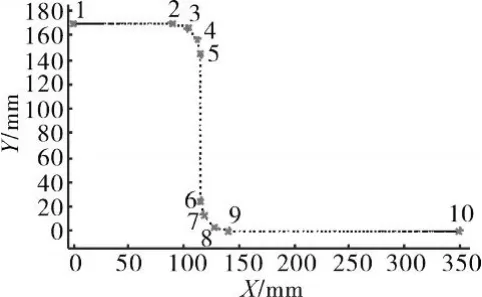
图4 实际坐标下标定点和扫描点
2 曲线管路测试试验验证
2.1 SLDV测试
为了验证曲线激光连续扫描测试方法的准确性,选择1个方向进行激光SLDV和CSLDV测试,并将SLDV测试振型作为评价CSLDV测试的基准。
以某发动机外部部分弯曲管路作为研究对象,弯管在模态测试中测点布置如图5所示。
测试采用力锤激励,使用橡皮绳悬挂弯管,弯管总长为0.57 m,模拟自由边界条件,共设置19个测点,每个测点测试3次并取平均值,分析频率为2000 Hz,测试时间为182.4 s,测得第1、2阶固有频率分别为234.4、660.5 Hz。相应的模态振型如图6所示。图中黑线为初始模型,蓝线为模态振型。

图5 弯管测点布置

图6 弯管前2阶模态振型
2.2 CSLDV测试
设置激光曲线激光连续扫描测试距离为1879.3 mm,测试时间为2 s,采样率为8192 Hz,通过测试软件在实际管路相应位置上选取10个标定点,根据坐标变换算法计算镜片扫描电压,使激光点以正弦速度在结构表面做往返运动,同时,采集扫描路径上的振动信息。采用力锤激励方法对弯曲管路实施激励,此时激光连续扫描采集的弯曲管路振动速度信号是扫描路径上的工作变形和扫描频率调制的振动响应信号,如图7所示,对其时域信号进行解调得到的频谱如图8所示。

图7 弯管连续扫描测试时域信号

图8 弯管连续扫描测试频谱
弯曲连续扫描测试的频谱特征是以每阶固有频率为中心、扫描频率为谱线之间的间隔形成的一系列边带谱组成,固有频率即为中心谱线处的频率。将图8测试得到的弯管前2阶振动频率及其对应的边带谱进一步分别用如图9、10所示。

图9 弯管连续扫描测试第1阶边带谱
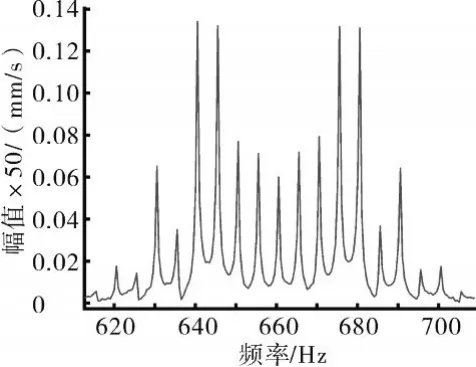
图10 弯管连续扫描测试第2阶边带谱
使用文献[13]中提出的方法对边带谱进行解调获取多项式系数并拟合成对应的归一化坐标下的振型,最后经坐标变换就可获取实际坐标下结构的振型。
2.3 结果对比
弯管连续扫描工作变形分析是在归一化坐标内进行的,参考图4的归一化坐标,设置[-1,1]内均匀分布50个测点进行解调分析。弯管的第1、2阶模态在归一化坐标的工作变形如图11所示。
CSLDV与SLDV弯曲管路测试时间及测点分辨率对比见表1。从表中可见,与SLDV测试相比,CSLDV测试时间短、效率高,且测点分辨率高,可通过增加信号解调时设置的测点提高测点分辨率。

图11 弯管第1、2阶归一化工作变形

表1 CSLDV与SLDV测试时间及测点分辨率对比
从图4可见,通过坐标变换将归一化工作变形转换到实际坐标下,并与SLDV测试振型的对比如图12所示。图中黑线为初始模型,蓝线为SLDV测得振型,红线为CSLDV测得振型。

图12 CSLDV和SLDV测试振型对比
CSLDV测试与SLDC测试相关分析见表2。从表中可见,2种测试方法测试频率一致,振型相关性较高,验证了曲线连续扫描测试方法的有效性。

表2 弯管CSLDV测试与SLDV测试相关分析
3 结束语
本文研究了弯曲管路工作变形激光连续扫描测试方法,用多线段逼近曲线,研究了曲线连续扫描路径的坐标转换方法,并将冲击激励应用于弯管的曲线连续扫描测试,有效获得了弯管的前2阶工作变形,与SLDV测试振型具有很高的一致性,验证了激光曲线连续扫描测试方法的有效性。本方法具有测点密集、精度高、测试效率高的特点,是激光连续扫描测试工程应用的突破。