纠错复原型机器人教学案例研究
2019-09-10康斯雅 钟柏昌
康斯雅 钟柏昌

摘 要:中小学机器人课程作为一门典型的工程教育类课程备受关注,如何在机器人教育中培养学生的工程设计思维和问题解决能力值得研究者思考。通过纠错任务解决机器人产品中的问题,能够促进学生理解机器人内部组成结构及功能,培养问题解决能力,获取更深层的学习体验。结合已有研究,文章尝试将纠错复原型教学模式应用于中小学机器人教育,通过感知与操作、拆分与分析、识别与诊断、测试与总结等步骤引导学生发现问题、思考问题并解决问题,旨在为机器人教育提供实践参考。
关键词:机器人教育;纠错复原型教学模式;案例研究
中图分类号:G4 文献标志码:A 文章编号:2096-0069(2019)01-0037-05
现阶段中小学机器人教学过程大多数侧重于模拟或模仿[1],参考相关机器人厂家提供的说明书进行零件安装和项目学习[2]。尽管此方法可以让学生掌握一些知识与技能,但是灌输学习显然不利于工程类学科的教育。机器人教育作为一种典型的工程教育之一,对学生问题解决的培养至关重要。学生通过课堂中对机器人的纠错分析和动手实践,可以有效感知和理解其操作原理,同时也能培养工程思维和问题解决能力。本文尝试在教学过程中引入纠错任务,针对机器人运行、避障、循迹等项目分别设计适合的教学内容,使机器人教育充分发挥教学价值。
一、纠错复原型机器人教学特点及价值
纠错,也称故障检测,是问题解决的一种常见形式。日常生产生活中的纠错常指技术人员或专业人员通过诊断并修正故障,让系统恢复至正常状态[3]。机器人教育中的纠错复原型教学模式是指将机器人的故障检测与修复作为主要学习任务,使学生在检测和调试机器人系统故障的过程中,分析故障原因(涉及机器人结构、传感、控制、动力以及通信等不同方面),并设计和运用多种方案进行修正,以此解决机器人产品中的问题[4]。此模式以逆向工程思想、纠错学习理论等为基础,核心价值表现为帮助学生将所学知识应用于实际问题,积累经验并提升工程设计能力。与传统教学方式相比,纠错复原型机器人教学模式具有以下特点:
一是机器人纠错复原模型较为系統。纠错复原型教学模式不以纠错为最终目的,该模式强调问题的发现与解决,主张以纠错复原的基本过程为教学主线,通过感知与操作、拆分与分析、识别与诊断、测试与总结等过程培养学生的工程设计及问题解决等能力。
二是机器人纠错任务形式较为多样。在实际教学应用中,纠错包含两个层面,第一个层面是机器人教学过程中自然发生的错误,第二个层面是教师人为设计的纠错任务,为充分验证纠错复原型机器人教学模式的教学效果,本研究将重点采用人为设计的纠错任务,但不排除自然发生的纠错任务的教学优势。
三是机器人纠错涉及领域较为广泛。机器人的故障检测与修复存在于造型搭建领域、程序设计领域等,教师需针对不同领域分别设计纠错内容。
二、纠错复原型机器人教学案例设计
(一)纠错复原型机器人教学方法设计
在机器人教育中,通过教师提供的故障产品培养学生的纠错能力是必要的,此过程也为机器人理论知识应用于实际问题、提高学生的工程设计水平提供了新的途径。纠错复原型机器人教学过程具体体现为:感知与操作——拆分与分析——识别与诊断——测试与总结等,具体解释如下:
1.感知与操作
本环节意在使学生投身机器人产品,通过对产品的感知提高兴趣,以便进一步理解其结构和功能。不同于传统的讲授演示型教学,感知与操作过程可以让学生自主探寻,减少对机器人产品的陌生感。
在机器人的造型搭建领域,感知与操作的载体体现在机器人的组成结构。教学开始时,学生感知和操作已损坏或功能缺失的机器人产品结构,为以后的机器人拆分与分析做准备;在机器人的程序设计领域,感知与操作的载体体现在机器人产品的程序指令,主要包括机器人实现的功能和已有程序的测试,此部分要求学生已经掌握机器人软硬件操作相关的基础知识和基本技能,显然不适用于教学初期。
2.拆分与分析
拆分与分析,是指在对机器人拆解的过程中观察各组成部分的结构,同时理解各部分的存在意义。本环节的重点在于通过动手操作分析机器人的结构和功能,使学生结合逆向思维理解产品的设计过程,并尝试寻找故障根源。
在机器人的造型搭建领域,拆分与分析体现在机器人结构的拆解、测量和记录。在分析和揣摩别人安装过程中推断产品的设计意图,并尝试寻找故障根源。在机器人的程序设计领域,此步骤侧重于执行程序的拆分与分析,学生将基于已有基础和教师的引导对功能实现的代码进行结构拆分,分析和记录故障指令与作用,并构思实现该功能所需要的正确执行代码,为下一步故障代码的识别与诊断做好准备。
3.识别与诊断
识别与诊断是解决故障根源过程中非常重要的环节。很多学生能够发现故障根源,但在解决问题时会遇到困难,因此该环节旨在培养学生的工程设计和问题解决能力,使学生在发现问题后可呈现出有效的解决方案。
在机器人的造型搭建领域,识别与诊断是指学生识别出机器人结构搭建的错误所在,结合各零部件的测量和记录梳理修正故障所需要的材料,并经过思考与讨论对可执行的修改方案做出判断;在机器人的程序设计领域,该过程是指通过上一环节中分析和记录的指令功能,对故障指令进行筛选并提出修改意见、完善诊断报告。
4.测试与总结
纠错复原型机器人教学的最终物化成果是修正存在故障的机器人产品,本环节的教学旨在结合诊断报告,在分析产品需求、投资、安全、生产、能源及综合性因素之后选出最优方案进行检验测试以获得更深层的学习体验[5]。此环节在工程设计过程中至关重要,不断地完善故障机器人的造型或程序可以增加成就感,反复的调试过程会使学生掌握真实经验,有利于提高解决实际问题的能力。
在实际教学过程中,该步骤不仅包括学生对机器人纠错与复原全过程的感悟与总结,也包括教师对本节课教学内容的总结、教学知识的回顾以及课程的评价,其中课程评价包括与机器人课程内容相符的能力水平标准测试、参考以往研究设计的机器人学习态度调查、多维度的机器人作品评价以及课后访谈等方法[6]。教师可以通过以上多方面的评价进行教学设计的反思和调整,其中的能力水平标准测试和机器人作品评价也有利于学生巩固课程中学习的知识,从而不断提高教学质量。
(二)纠错复原型机器人教学案例设计
在本研究中,纠错复原型机器人案例设计主要考虑如下因素:教学项目的趣味性和可行性,教学内容的探索性和连贯性。
首先,教学项目的选择需符合中小学生的特点,更具趣味性的项目会吸引学生的注意力,使其充分投入到教学内容中来。但仍需结合学生的学习情况实施复杂的纠错项目,否则不仅无法解决已有问题还会增加学生的挫败感,因此在设计项目时要充分考虑实施过程的复杂程度,以平衡学生的学习动机和执行能力。
其次,教学内容的设计可以从生活实际出发,使学生在掌握知识和技能的基础上,激发学习机器人的积极性,进一步探索机器人的奥秘。结合已有知识,循序渐进地引导学生参与到发现问题、解决问题的过程中,为提高学习效率、培养工程设计思想和问题解决能力提供可能。
三、纠错复原型机器人教学案例设计应用
这里以“探测巡线走”的教学为例,介绍纠错复原型机器人教学案例的设计及应用。
(一)方案设计
1.教学内容与学生情况分析
本节课“探测巡线走”的教学重点是实现探测机器人的巡线行进,主要涉及的传感器是巡线传感器,教学对象是小学五年级的学生。总体而言,该学段位于学习机器人的初级阶段,侧重于机器人基本知识与基本技能的掌握。前面几节课,学生学习了探测机器人的拆装步骤和电机的原理及应用,熟练掌握了机器人的造型搭建和程序编写上传至机器人的流程,对探测机器人有了浓厚的学习兴趣。与初学者相比,在动手操作与编程能力方面都有了显著的提升。
2.教学目标
在知识与技能方面,要求学生了解巡线传感器具备的功能和运行原理,学会在mBlock图形化编程软件中使用巡线传感器等指令实现巡线功能,并了解巡线功能在日常生活中的现实意义。
在过程与方法方面,要求学生在掌握巡线传感器原理的基础上,理解相关指令代码的功能与意义,并通过纠错复原的过程实现探测机器人的巡线功能。
在情感、态度与价值观方面,要求学生通过修改并完善程序指令,感受程序设计的操作过程,使学生了解机器人课程并不只是简单的搭建,激发对机器人进一步探索的积极性。
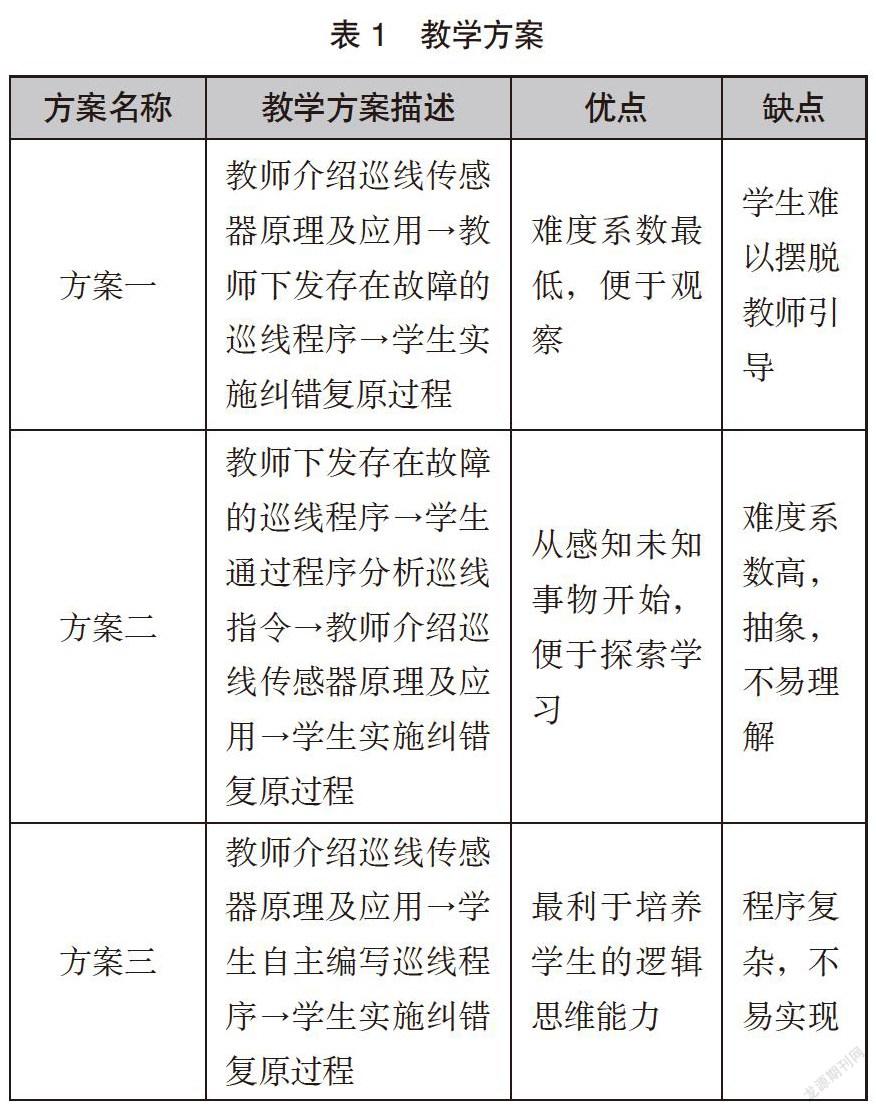
3.可选方案的设计与选择
基于教学内容可知,本节课主要是使学生理解巡线传感器原理,实现探测机器人巡线功能,本文初步设计以下几种教学方案,如表1所示。笔者在综合几种方案的优缺点、实际教学时间,并分析五年级学生的学习情况之后,最终选择了方案一。先由教师介绍巡线传感器的原理及应用,接着下发人为设计的故障巡线程序,随后展开纠错复原教学过程。
(二)教学实践
1.复习与导入
本环节主要是带领学生回顾上节课学习的电机原理及应用,引导学生从程序设计的角度去分析机器人的执行过程。教师以巡线传感器在现实生活中的应用为例,导入本节课的教学重点——实现机器人巡线功能,并播放探测机器人巡线走的视频,以便教學的展开。
2.讲解与抛疑
本环节的第一部分是向学生介绍巡线传感器的工作原理,让学生了解到巡线传感器上有两个传感器,每个传感器上包含红外发射LED和红外感应晶体管,而机器人正是利用传感器的信号才能在白底背景上巡线前进。随后向学生解释可以巡黑线是因为红外光线的反射特性,引导学生了解光的反射和信号传输等相关知识。
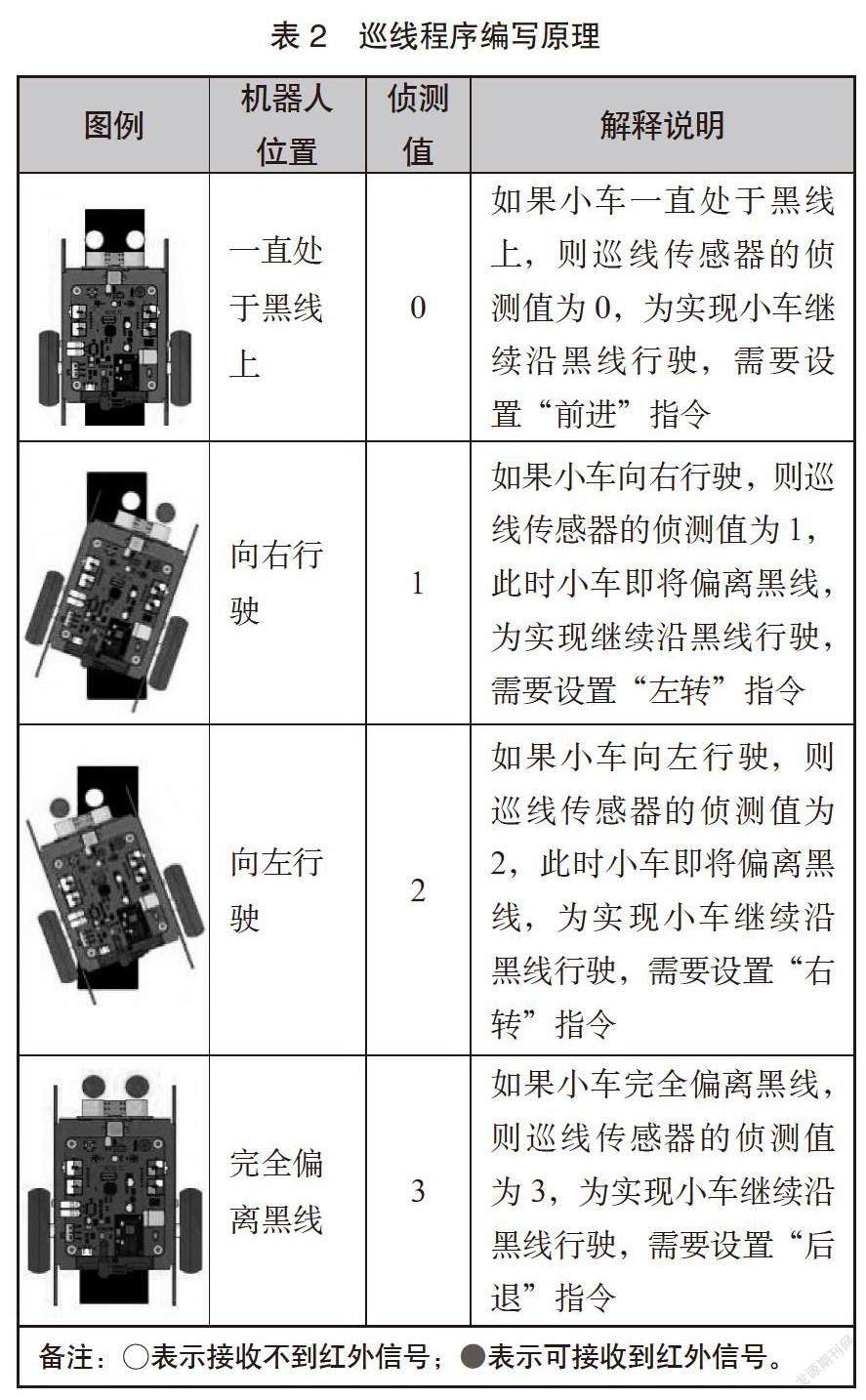
第二部分是向学生介绍通过mBlock图形化编程软件实现探测机器人巡线走的原理,如表2所示。教师通过讲解机器人巡线功能与编程指令之间的关联,使学生进一步感知程序设计的原理,为之后的程序纠错做铺垫。
学生掌握了实现机器人巡线功能的原理之后,第三部分是由教师下发纸质版路线示意图(以小组为单位)和存在故障的程序(以个人为单位),如图1和2所示,为之后的纠错复原过程做好准备。
3.感知与操作
本环节是在前一环节的基础上对机器人进行的自主探究学习。学生以小组为单位领取探测机器人,并对接收的故障程序进行测试。
4.拆分与分析
在本环节中,学生仍以小组为单位,基于已有知识以及教师的指导,对故障代码进行结构拆分,并分析和记录相关指令及功能。通过组内商讨对填写的指令功能达成统一意见,依次记录指令分析的序号、名称及功能。
5.识别与诊断
本环节是上一环节的延续,侧重于识别故障指令中的错误。学生以个人为单位依次记录序号、指令名称和修改意见,填写好之后与组内同学协商,并达成统一意见,为下一步测试做准备。
6.测试与总结
本环节共包含四个部分,第一部分是学生根据识别与诊断表格对程序代码进行迭代的修改和测试,同时教师负责观察各组的修改意见是否正确;第二部分是时间截止后,成功调试出巡线功能的小组进行演示,并讲解指令修改意见;第三部分是教师对本节课下发的代码进行故障讲解,并下发代码文件,讲解正确代码的结构和功能;第四部分是教学效果的评价,包括能力水平标准测试、问题解决能力问卷调查等。
(三)教学反思
从实际教学效果来看,学生对巡线传感器的使用、程序代码的修改和编写掌握得比较扎实,这主要源于学生学习机器人的兴趣。不同于以往的讲授演示型教学,从故障代码出发更容易调动学生的积极性,使学生在学习过程中注重发现问题和解决问题。当然,本节课也有需要改进的地方,比如课堂教学时间的把控、如何引导学生进行迁移创新等,希望能够再次完善教学过程,以便呈现更好的教学效果。
四、小结
学生在“探测巡线走”的学习过程中深入探索,尝试发现和解决问题。提供给学生存在故障的机器人或程序代码,以纠错复原型教学模式进行知识与技能的学习,有益于帮助学生掌握机器人相关知识、自主地探索与发现。本研究着力于机器人的教学实践,通过纠错复原型机器人项目的开发和应用探讨更多的教学模式的可行性,为中小学机器人教学模式提供一种新的参考。
[1]闫妮,钟柏昌.中小学机器人教育的核心理论研究:论发明创造型教学模式[J].电化教育研究,2018,39(04):66-72.
[2]韩蕾,李婷婷,钟柏昌.基于GOMS的趣味交互型机器人教学案例设计研究[J]. 数字教育,2016,2(6):61-66.
[3]JONASSER D H,HUNG W.Learning to Troubleshoot:A New Theory-based Design Architecture[J].Educational Psychology Review(S1040-726X),2006,18(1):77-114.
[4][5][6]李婷婷,鐘柏昌.中小学机器人教育的核心理论研究:论实验模拟型教学模式[J].电化教育研究,2017,38(9):96-101.
Case Study on Error Correction and Recovery Robot Teaching
KANG Siya,ZHONG Baichang
(School of Education Science,Nanjing Normal University,Nanjing,Jiangsu,China 210097)
Abstract: The robotic curriculum of primary and secondary schools has attracted much attention as a typical engineering education course.How to cultivate students’engineering design thinking and problem-solving ability in robot education is worthy of researchers’thinking.Solving problems existed in robot products through error correction tasks can help students understand the internal structure and functions of robots,cultivate their problem-solving skills,and gain a deeper learning experience.Combined with existing research,this paper attempts to apply the error correction and recovery teaching mode to primary and secondary school robot education.Through the steps of perception and operation,splitting and analysis,recognition and diagnosis,testing and summarization,the students are guided to discover problems,think about problems and solve problems,hoping to provide a practical reference for robot education.
Key words: robot education;error correction and recovery teaching mode;case study
