三轴直角坐标系立体定位CT导航辅助经皮椎间孔镜手术治疗腰椎间盘突出症的疗效分析
2019-08-29韩艳波吴月怡红玉杜丽艳
韩艳波,吴月,怡红玉,杜丽艳
(滦州市人民医院,河北 唐山 063700)
经皮椎间孔镜下髓核摘除术(percutaneous transforaminal endoscopic discectomy,PTED)目前已成熟应用于腰椎间盘突出症(lumbar disc herniation,LDH),并取得较好疗效[1-2],但需充分依靠影像学导航技术进行精准的定位,引导其抵达靶点位置[3]。本课题组尝试将三轴直角坐标系立体定位CT导航应用于PTED手术中,取得了较好效果。
1 资料与方法
1.1 一般资料
随机选择2014年1月-2016年1月收治的LDH患者71例,采用随机数字表法分为两组:观察组33例,均采用三轴直角坐标系立体定位CT导航下PTED手术治疗;对照组38例,均采用常规C臂机透视导航下PTED手术治疗。对比两组患者的性别、年龄、病程和突出节段等资料,差异均无统计学意义(P>0.05),见表1。
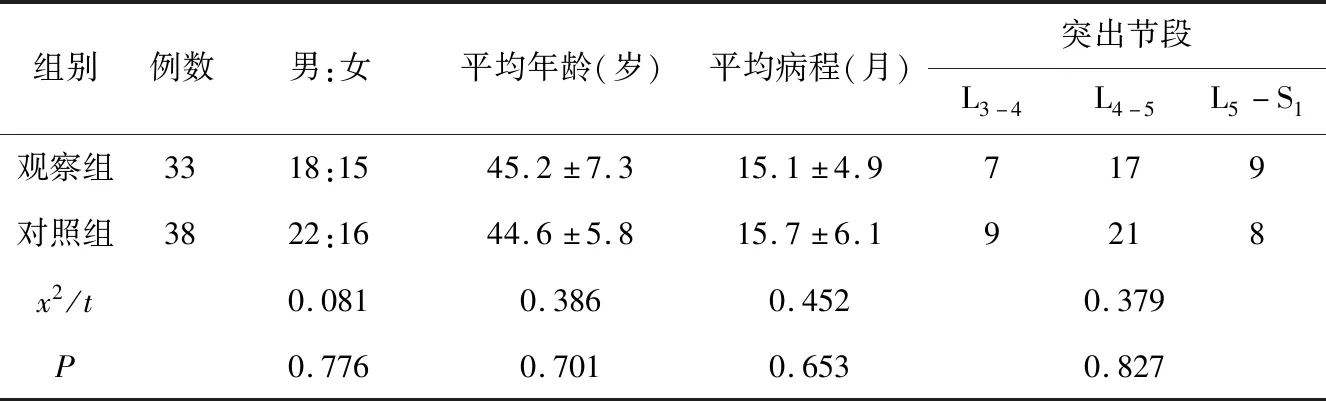
表1 两组LDH患者的基线资料比较
1.2 手术方法
观察组:将患者按术前设计体位在负压固定袋辅助下固定CT床上,安装连床固定架、导航支架及模板,设定扫描参数及扫描范围,对病变椎间隙进行CT扫描,确定椎间盘病变部位作为靶点,并在CT图像上标出安全穿刺路径,利用CT激光定位线及标尺确定体表投影区域靶点。常规碘伏消毒术区皮肤,铺无菌洞巾,调整导航仪支架,根据CT图像测量X轴角度及Y轴角度(在X轴角度为0°的情况下调整Y轴角度),根据CT图像上靶点与模板平面垂直线确定进针模板针孔(图1-2),1%利多卡因局部浸润麻醉成功后,穿刺针自进针点刺入达靶点,再次CT扫描,确定穿刺针位置及深度,精确达到靶点位置,进行椎间盘突出组织染色。对照组:行常规穿刺操作。
两组患者穿刺进针操作完成后,沿导丝作0.8 cm的皮肤切口,并置入扩张导管,打磨、扩大椎间孔,置入工作通道,连接孔镜系统。在内镜直视下将蓝染的髓核组织摘除干净,并调整工作通道的角度和镜头方向,仔细探查是否有突出的髓核组织压迫神经根和硬膜囊,并摘除之。仔细探查神经根和硬膜囊恢复搏动后,以射频消融处理残余的髓核组织碎片,并进行纤维环皱缩成形处理。冲洗术区,缝合切口,术毕。

图1 术中穿刺针自进针模板进针
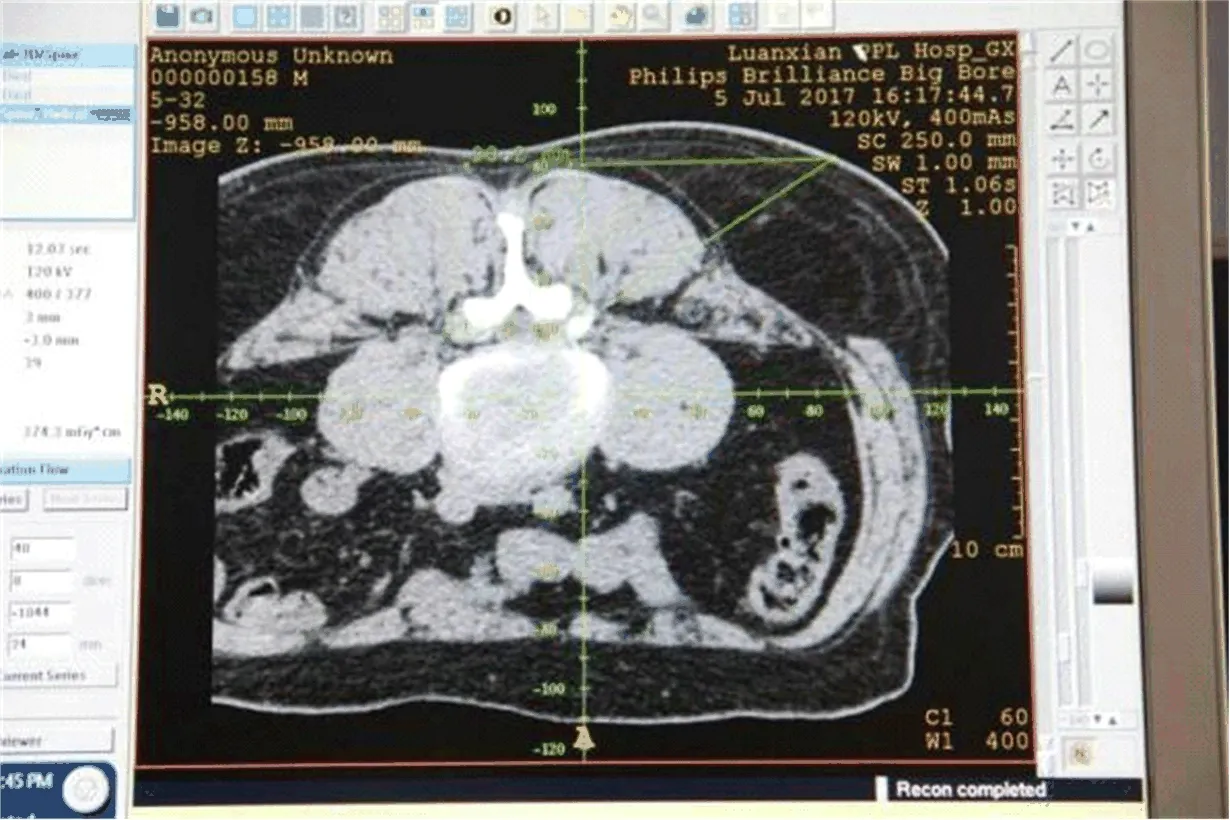
图2 根据CT图像上靶点与模板平面垂直线确定进针点
1.3 统计学分析

2 结果
71例患者均顺利完成PTED手术,无中途更改其他手术方案者,且术后均获24-29个月、平均26.3个月随访,无失访者。
2.1 手术情况
由表2可见,观察组患者的PTED工作通道建立时间明显短于对照组,且穿刺次数也明显少于对照组,差异有统计学意义(P<0.05)。
手术并发症方面,观察组术中发生硬脊膜破裂1例,术后出现感染1例,总发生率为6.06%(2/33);对照组发生神经根损伤2例,硬脊膜破裂2例,术后血肿1例、感染1例,总发生率为15.79%(6/38)。两组并发症发生率相比,差异有统计学意义(x2=4.864;P=0.027)。
2.2 VAS评分和ODI指数比较
两组患者行PTED术后,VAS评分和ODI指数均显著改善,术后7 d、3个月和末次随访时的评分均较术前有显著降低(P<0.05);组间对比,观察组术后7 d的VAS评分和ODI指数均显著低于对照组,差异有统计学意义(P<0.05),见表3所示。
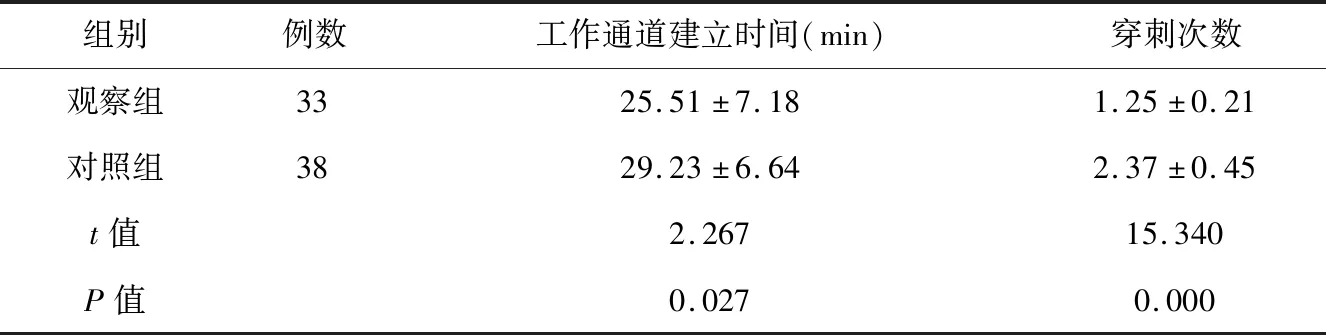
表2 两组LDH患者行PTED手术情况比较
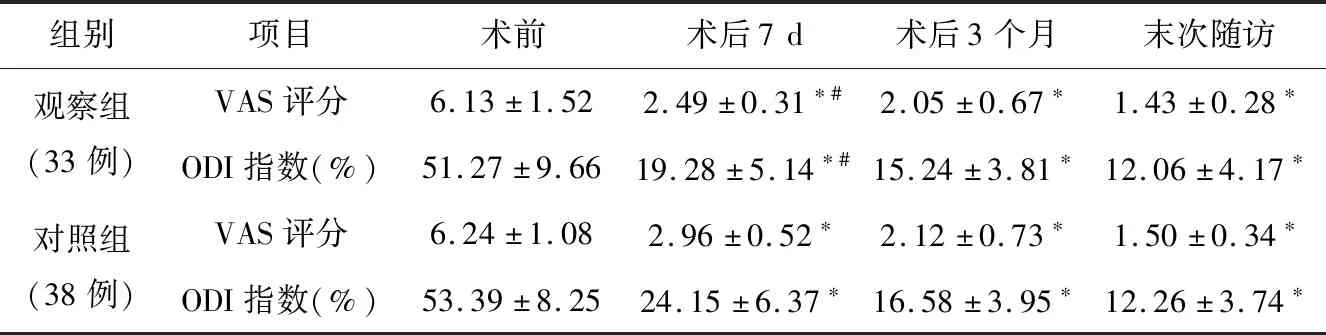
表3 两组LDH患者行PTED手术前后的VAS评分和ODI指数比较
注:与术前相比,*P<0.05;与对照组相比,#P<0.05。
2.3 疗效比较
末次随访时,观察组优17例,良12例,可3例,差1例,优良率为87.8%;对照组优19例,良13例,可4例,差2例,为84.2%。两组优良率比较,差异无统计学意义(x2=0.538,P=0.463)。
3 讨论
PTED手术成功的前提在于精准定位穿刺,将工作通道准确地置于手术靶点区域,因此,需借助于影像学手段进行进针引导。目前,临床常见的导航手段为X线透视,其设备低廉,操作简单,但其属于二维成像,仅可清晰显示骨性结构,难以真实反映脊柱周围组织情况,且存在透视显影重叠的弊端,甚至会对术者产生误导[4];同时,反复多次的X线透视对术者和患者均可造成伤害[5-6]。而本研究采用三轴直角坐标系立体定位CT导航进行PTED的穿刺引导,是通过以下步骤操作完成:(1)利用导航仪的激光定位、三轴直角坐标测量,在CT图像上实时模拟出最佳的进针路线和穿刺角度;(2)术者按照提前预演的穿刺路径,进行精准穿刺;(3)穿刺成功后,通过CT快速扫描可再次观察冠状位和矢状位的进针点位置,从而确定穿刺效果。其原理是通过CT激光构建三轴直角坐标系,并与实时的CT图像进行匹配后,科学直观精准地测算出最佳的穿刺角度、深度和穿刺路径(见图2)。而后,通过进针模板对穿刺点进行精准匹配,从而准确地定位穿刺点和穿刺方向。其优点在于:可在术中实时进行模拟、预演,因而指导性很强;此外,其无需进行庞大数据的计算机处理和3D图像重建,仅通过“三轴坐标测量-确定进针路线”即可开始穿刺操作,故操作简便,易于掌握。
在本研究中,观察组的工作通道建立时间仅为(25.51±7.18)min,显著短于对照组的(29.23±6.64)min;穿刺次数仅为(1.25±0.21)次,亦显著少于对照组的(2.37±0.45)次,上述差异均有统计学意义(P<0.05),结果证实了该导航方案的优势。此外,在手术安全性方面,观察组硬膜撕裂、感染等并发症发生率仅6.06%,亦显著低于对照组的15.79%(P<0.05),表明该导航系统有效提高了PTED手术的安全性。在两组VAS评分和ODI指数对比中,观察组术后7 d的改善效果亦显著优于对照组(P<0.05),我们分析认为,可能与观察组穿刺次数较少、对机体造成的创伤较轻有关。
综上所述,在PTED手术中应用三轴直角坐标系立体定位CT导航,可有效提高经皮穿刺的精准度,减少手术创伤,提高手术安全性。