考虑转向的汽车主动避撞控制系统研究
2019-07-19阴培蒋拯民叶茂赵帅周博林
阴培 蒋拯民 叶茂 赵帅 周博林
(1.长安大学,西安 710064;2.中国汽车技术研究中心有限公司数据资源中心,天津 300300)
主题词:智能车辆 避撞决策 避撞控制 转向避撞 制动避撞
1 前言
随着智能化水平不断提高,越来越多的汽车集成高级辅助驾驶(ADAS)功能,有效提高了车辆的主动安全性,如何设计避撞控制算法、充分发挥智能车辆的避撞潜力已成为智能车辆安全性研究的重要任务之一。
国内外学者对智能车辆的避撞控制进行了相关研究。文献[1]~文献[5]通过对节气门开度和制动压力的协调控制实现了车距与车速保持、紧急制动,但对制动过程中乘坐舒适性和道路附着能力限制考虑不足;文献[6]基于正弦加速度函数建立了避撞换道轨迹,但避撞控制的侧向加速度阈值较高且换道稳定性较差;文献[7]规划了换道避撞轨迹,设计了模型预测控制(Model Predict Control,MPC)换道控制器,但只考虑了前车匀速工况;文献[8]~文献[10]设计了横向滑模控制器,以前轮转角作为控制输出,但滑模控制抖振特性会加剧车辆部件磨损;文献[11]假设车辆前轮小幅转动并设计了横向控制器,与车辆转向避撞时前轮大幅转动的工况不符。
由此可见,目前智能车辆避撞控制多将制动和转向分开研究,且车辆纵向制动避撞系统的研究已经成熟,但采用制动、转向相结合的研究较少,且涉及两者协调控制的避撞系统研究尚存诸多不足:文献[12]分析了前车静止和运动条件下的制动避撞和转向避撞所需安全距离和安全收益,模型推导过程中假设以道路-轮胎所能提供的最大加速度进行制动或换道,与实际驾驶工况不符;文献[13]所研究的制动/转向避撞系统仅在制动无法避撞时才采取转向避撞,不能充分发挥避撞潜力;文献[14]设计了纵向分层制动控制器和侧向终端滑模控制器,但未能建立转向、制动避撞决策机制。上述控制方法都未能考虑制动、转向加速度约束,影响乘坐舒适性[15]。
本文针对以上研究的不足,将智能车辆避撞限定为仅通过转向和仅通过制动[16],设计了本车在低速、中速和高速不同工况下的制动/转向避撞控制方法,提出了基于碰撞时间(Time To Collision,TTC)和跟车时距(Time Head Way,THW)的智能车辆转向避撞和纵向制动决策机制,并通过Simulink/CarSim联合仿真验证智能车辆避撞控制的协调性有效性。
2 整车数学模型及横、纵向控制系统
2.1 车辆动力学模型
本文将车辆简化为二自由度汽车模型,建立的车辆动力学模型分析了车辆纵向受力情况,忽略车辆侧倾和俯仰运动,忽略悬架和转向系统,并以前轮转角作为系统输入。各车轮受力和整车纵向运动受力分别如图1和图2所示。
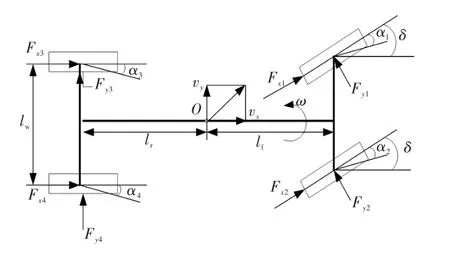
图1 车轮受力示意
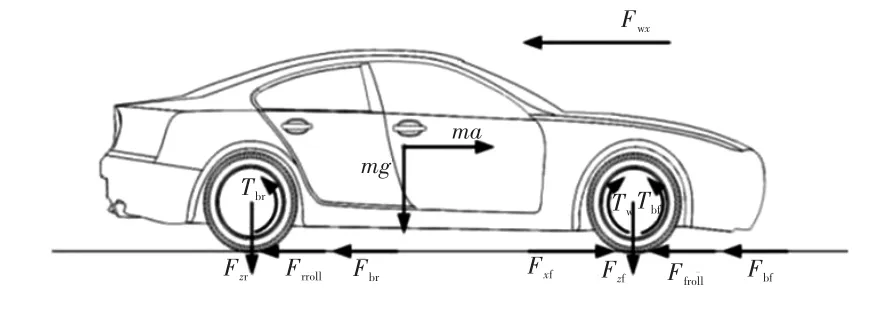
图2 车轮纵向运动受力分析
图2中,Fxi和Fyi分别为车轮所受纵向力和横向力(i=1,2,3,4分别表示左前、右前、左后、右后轮);lf和lr分别为质心至前、后轴距离;δ为前轮转角;lw为轮距;h为质心距地面高度。车辆纵向运动微分方程为:
式中,m为整车质量;vx、vy分别为纵向和横向车速;ω为横摆角速度;Fx为车辆纵向受力;Ft为驱动力;Ff、Fw和Fb分别为滚动阻力、空气阻力和车辆制动力。
2.2 横向控制系统
2.2.1 转向避撞轨迹规划
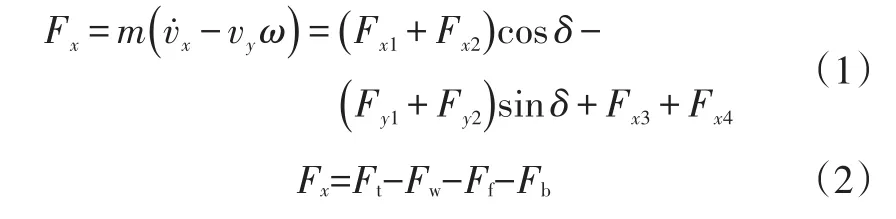
车辆转向避撞所处的道路环境如图3所示。图3中,M为本车,B为本车转向避撞时相邻车道的车辆,C为本车转向避撞时前方车辆。以C静止为例,假设B及时发现M的转向动作,以减速度aB制动,为避免B与M可能产生的追尾碰撞,M转向避撞时必须与B保持的最小纵向距离为:

式中,L为车身长度;vB为B的车速;T为车辆完成转向动作的时间;d0为两车相对静止时需保持的安全距离。
图3 车辆转向避撞道路环境
只有当M与B的纵向距离Dadj≥DM-B且道路和周围环境满足转向避撞决策条件时,M采取转向避撞动作。大量的实车试验数据也表明,多项式可以很好地逼近驾驶员真实转向运动轨迹[17],本文选取五次多项式进行避撞轨迹规划。
规定车辆转向起点到终点的纵向距离为Δx,侧向距离为Δy,构造五次多项式避撞参考路径:

式中,yref和xref分别为车辆在转向过程中行驶的侧向距离和纵向距离;c0~c5分别为各项系数。
以本车坐标系为参考,起始时刻车辆的横向位移、侧向速度和侧向加速度均为0,车辆以vx的速度匀速行驶。因此yref的一阶、二阶、三阶导数均为0。代入式(4),可得:c0=c1=c2=0,c3=10Δy/(Δx)3,c4=15Δy/(Δx)4,c5=6Δy/(Δx)5。
此处车辆以匀速转向,将xref=vx·t代入式(4),得到避撞参考路径关于时间t的表达式:

将式(5)对时间求导可得:

由式(6)可知,为提高车辆横向运动的乘坐舒适性,规划避撞轨迹时只需调节T和Δy即可将最大侧向加速度限制在一定范围内。
2.2.2 带预瞄路径跟踪模型
带预瞄路径跟踪方法基于转向几何学理论,研究车轮转角与预瞄点(gx,gy)处期望轨迹间的关系,如图4所示。

图4 带预瞄路径跟踪模型
预瞄点为从当前车辆后轴中心出发,到目标路径距离为ld的一点,同时定义车辆后轴中心到预瞄点(gx,gy)的横向距离为横向循迹误差eld,由几何关系可得:

预瞄距离ld与车速vx呈正相关:

式中,k为调整系数;α为车轮转角;R为转向半径。
期望前轮转角为:

将式(7)~式(9)代入式(10)中,可得带预瞄路径的跟踪控制律为:

2.3 纵向避撞分层控制系统
2.3.1 LQR期望加速度控制器
当车辆采取纵向制动避撞时,首先需要获取期望加速度,自车与前车的相对距离为:

式中,Xf为前车纵向位置;Xc为自车纵向位置。
定义ε为临界制动距离与实际车距的差值,为前车与自车的速度差,构建含自车实际加速度的状态向量为,控制量为u=[a],其中a为自车加速度,前车加速度干扰量为ω,得到离散形式的车辆纵向制动状态空间模型:
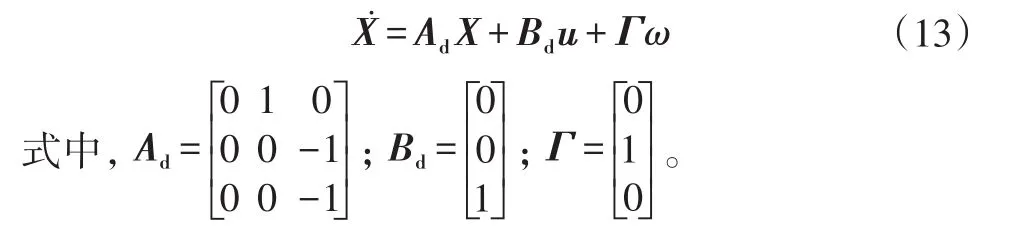
依据最优控制理论,设计性能指标函数为:

联立式(13)、式(14),得到加速度为:

与转向避撞施加乘坐舒适性约束类似,文献[18]在统计了125名驾驶员的制动过程后指出,制动减速度小于2 m/s2时,乘坐舒适性较好,制动减速度大于4 m/s2时,乘坐舒适性较差,据此将制动强度分级如表1所示。
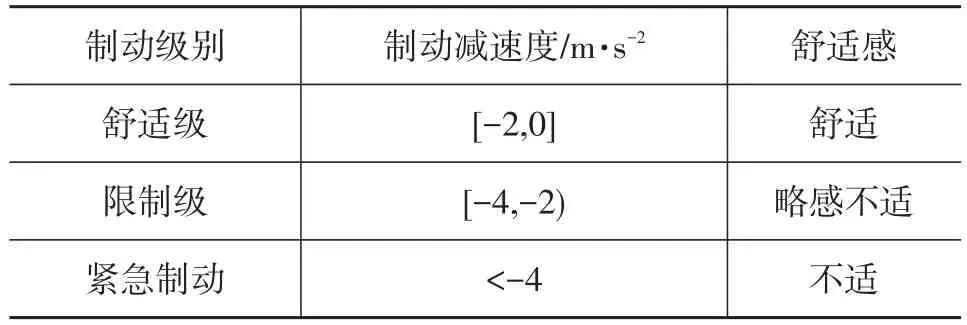
表1 制动强度分级
车辆采取制动避撞时,首先由式(15)计算期望制动减速度,为降低纵向制动时的不舒适感,将期望加速度ades限制在相应制动强度级别内:

式中,ψ为地面最大附着系数。
2.3.2 节气门/制动压力逻辑切换
车辆采取制动避撞时,设计含状态保持层的节气门/制动压力切换逻辑曲线[13],如图5所示。该曲线由车辆节气门开度为0的初始减速度决定。
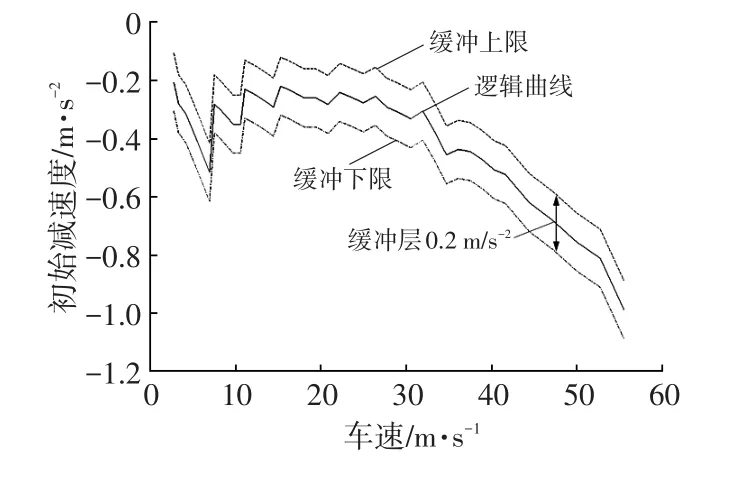
图5 节气门与制动压力切换逻辑
设计含有缓冲层的切换逻辑为:
a.ades-a0>0.1 m/s2时,进行节气门控制,制动压力为0。
b.ades-a0<-0.1 m/s2时,节气门开度为0,进行制动压力控制。
c.|ades-a0|≤0.1 m/s2时,状态保持,维持上一时刻的制动压力和节气门开度。
其中,a0为当前车速下初始减速度。
2.3.3 动力传动系统逆向控制
本文以期望加速度作为模型输入,以期望制动压力和节气门开度作为模型输出,动力传动系统逆向控制结构如图6所示。
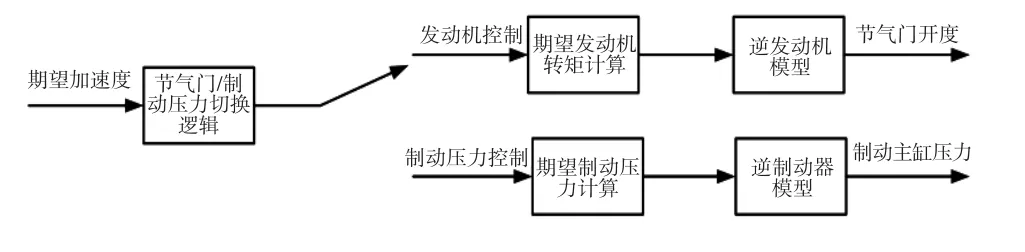
图6 传动系统逆向动力学模型
假设发动机经液力变矩器、变速器、主减速器传递到车轮上的驱动力为Ft,参看文献[13]的计算过程最终得到期望制动主缸压力为:

式中,Kb为制动力和制动压力的比例系数;Fwx为纵向空气阻力;Froll为滚动阻力。
3 避撞控制系统设计
3.1 避撞控制系统结构
智能车辆避撞控制系统结构如图7所示,是包含风险预判、转向控制和制动控制的综合控制系统。
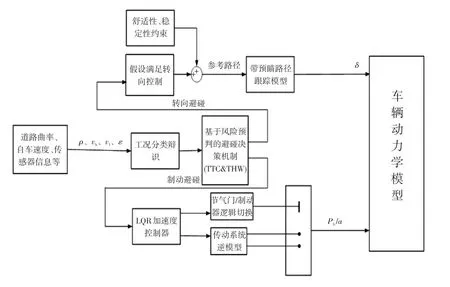
图7 避撞控制系统结构
图7中,基于风险预判的避撞决策机制根据前方道路曲率信息、自车速度、引导车辆速度、加速度等,计算不同工况下的碰撞风险,决策车辆所要采取的制动或转向动作。带预瞄路径跟踪模型研究车轮转角与预瞄点(gx,gy)处期望轨迹间的关系,得到前轮转角。制动控制器以LQR计算的期望加速度作为输入信号,根据传动系统逆动力学模型计算制动压力。
3.2 避撞决策机制
本文针对前车静止和匀速工况建立相应的避撞决策机制,从确保道路交通安全的角度出发,暂不讨论智能车辆近距离跟随前车的情况。以TTC和THW共同表征碰撞风险:
式中,vf为前车速度。
考虑到转向避撞,为满足横向乘坐舒适性和稳定性约束,依据前文提到的转向路径分析,此处规划留给转向避撞的时间T=2 s。不同工况下,TTC和THW变化情况不同。
3.2.1 前车静止
在此工况下,采取制动/转向避撞动作的临界点为:

以Th=0.1 s,Ts=0.28 s,d0=3 m为例,制动/转向避撞TTC和THW的比较曲线分别如图8所示。
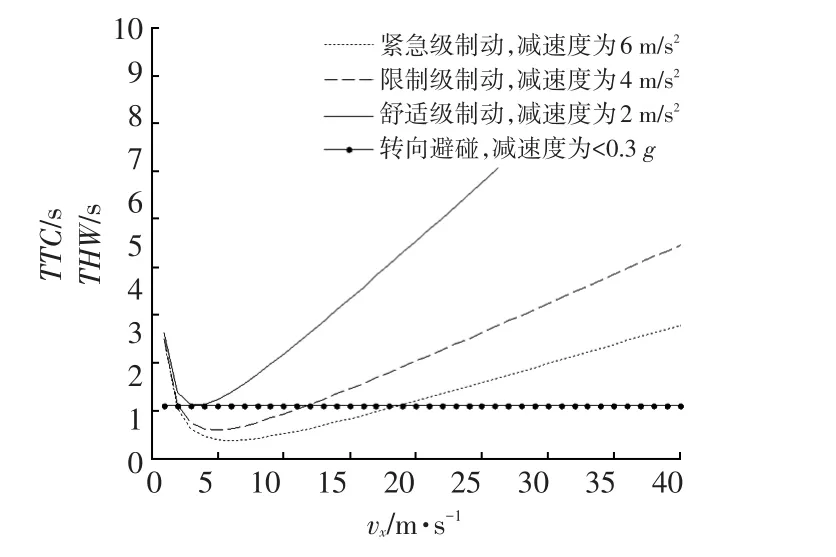
图8 静止障碍物制动/转向避撞TTC/THW比较
3.2.2 前车匀速运动
只有在自车速度高于前车时,才有碰撞风险,此种工况下采取制动/转向避撞动作的临界TTC和THW为:
以vf=20 m/s、Th=0.1 s、Ts=0.28 s、d0=3 m为例,制动/转向避撞TTC比较曲线如图9所示。
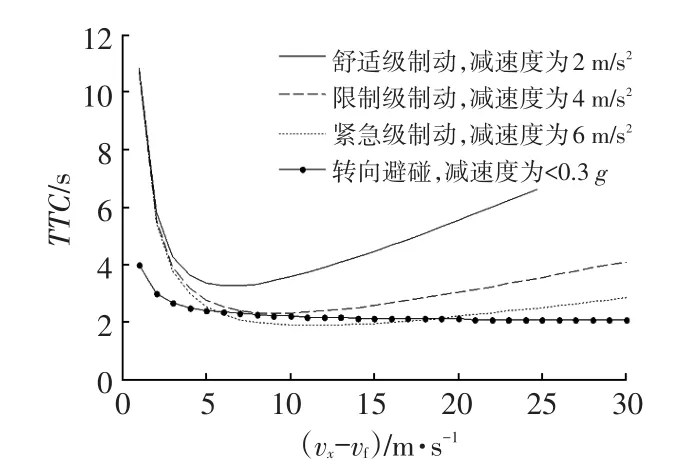
图9 前车匀速制动/转向避撞TTC比较
以vf=10 m/s、Th=0.1 s、Ts=0.28 s、d0=3 m为例,制动/转向避撞THW比较曲线如图10所示。
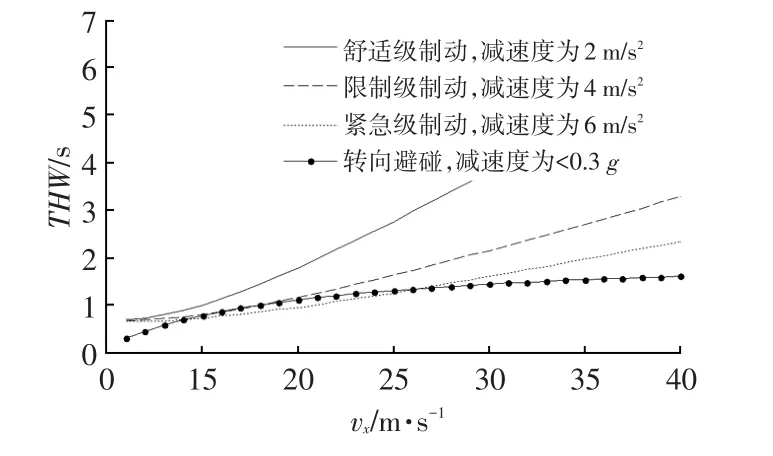
图10 前车匀速制动/转向避撞THW比较
本文选取两辆试验车辆,采取前后跟随的方式在试验场或选定的路段进行车辆避撞控制试验,采集危险发生过程中的TTC和THW,并根据自车车速和相对车速的不同,选择适当的制动避撞或者转向避撞。根据试验数据分析,建立如图11所示的决策机制,确定TTC1=0.8 s,TTC2=2.5 s,TTC3=3 s,THW1=0.5 s,THW2=1.5 s,THW3=3 s。并且,通过试验发现当车辆在行驶过程中制动避撞失效时,路面附着系数、侧向加速度、横摆角速度以及质心侧偏角等满足转向条件,可以选择转向避撞。可得如下结论:
a.当车速在(20,30)m/s范围内,转向不存在危险时,转向避撞较制动避撞更舒适。因为该车速下车辆制动控制所需的制动距离较大,可能与前车发生碰撞。此外,高速行驶的车辆在紧急制动过程中,由于制动减速度过大,会使驾驶员及乘客产生严重的不舒适感。
b.当车速≥30 m/s时,紧急情况下转向会更加危险,所以选择制动避撞。
c.当车速≤20 m/s时,紧急制动会使车辆在最短的时间内停止。所以,相比于转向避撞,制动避撞更加安全,且对驾驶员的驾驶技术要求更低。
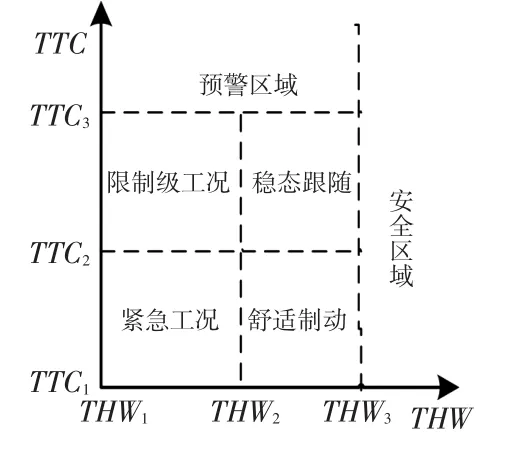
图11 避撞决策机制
4 仿真及结果分析
选取某车型为仿真对象,其整车参数如表2所示。采取前述的避撞控制算法和仿真参数,分析智能车辆在几种特殊工况下的转向避撞路径跟踪误差、侧向加速度、质心侧偏角、制动避撞的车间纵向距离误差。
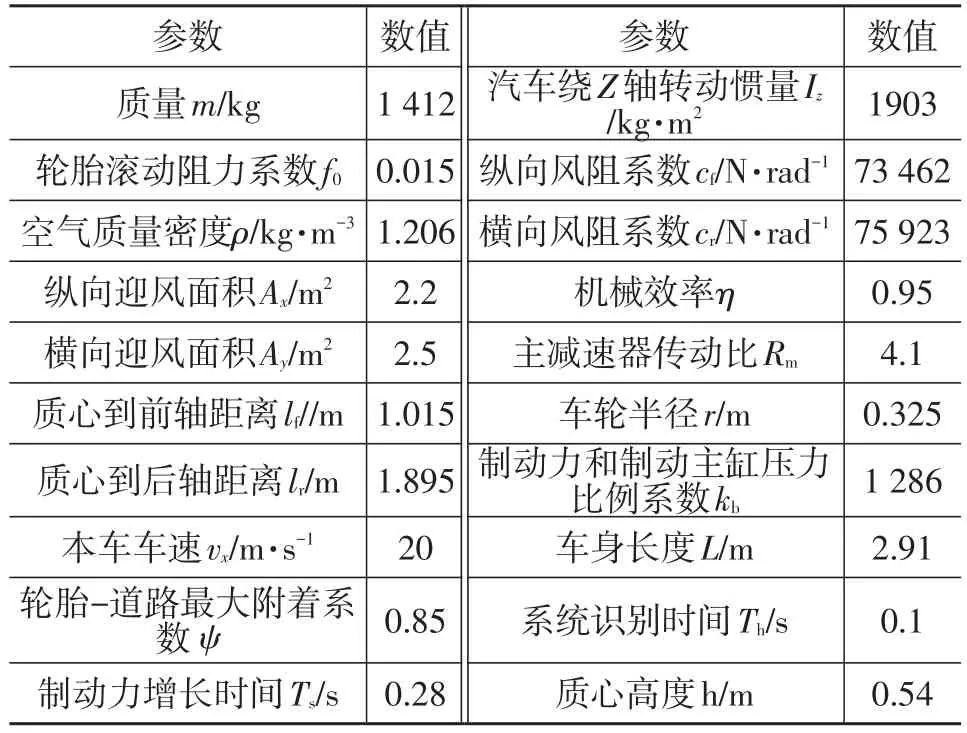
表2 某车型整车参数
针对本车低、中、高3种车速和前车不同行驶条件,在3种工况下进行仿真,各工况仿真参数如表3所示。通过本车和前车的车速、车间距可计算出两车的TTC和THW,对比车辆制动/转向避撞决策机制,选择合适的避撞机制。
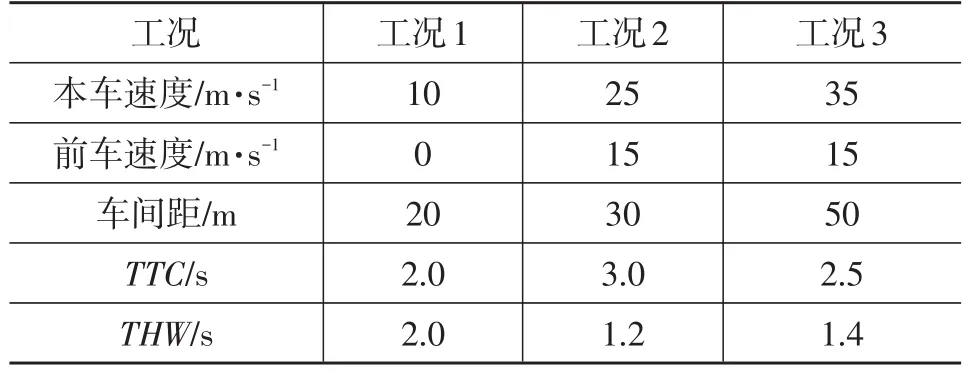
表3 车辆避撞仿真工况
图12~图14所示分别为3种工况的仿真结果。由图12可以看出,本车基本在紧急制动减速度限值内减速,最终在与前车相距2.2 m时停止。由图13可以看出,车辆完成转向动作时已经绕过前车且车辆能够较好地跟踪避撞参考路径,由于车辆行驶速度较高,航向角误差也相应增加,但最大航向角误差仍不超过1°。由图14可以看出,车辆在与前车最近相距3.53 m时,自车减速至停止,残存一定制动力矩以使车辆保持静止状态。
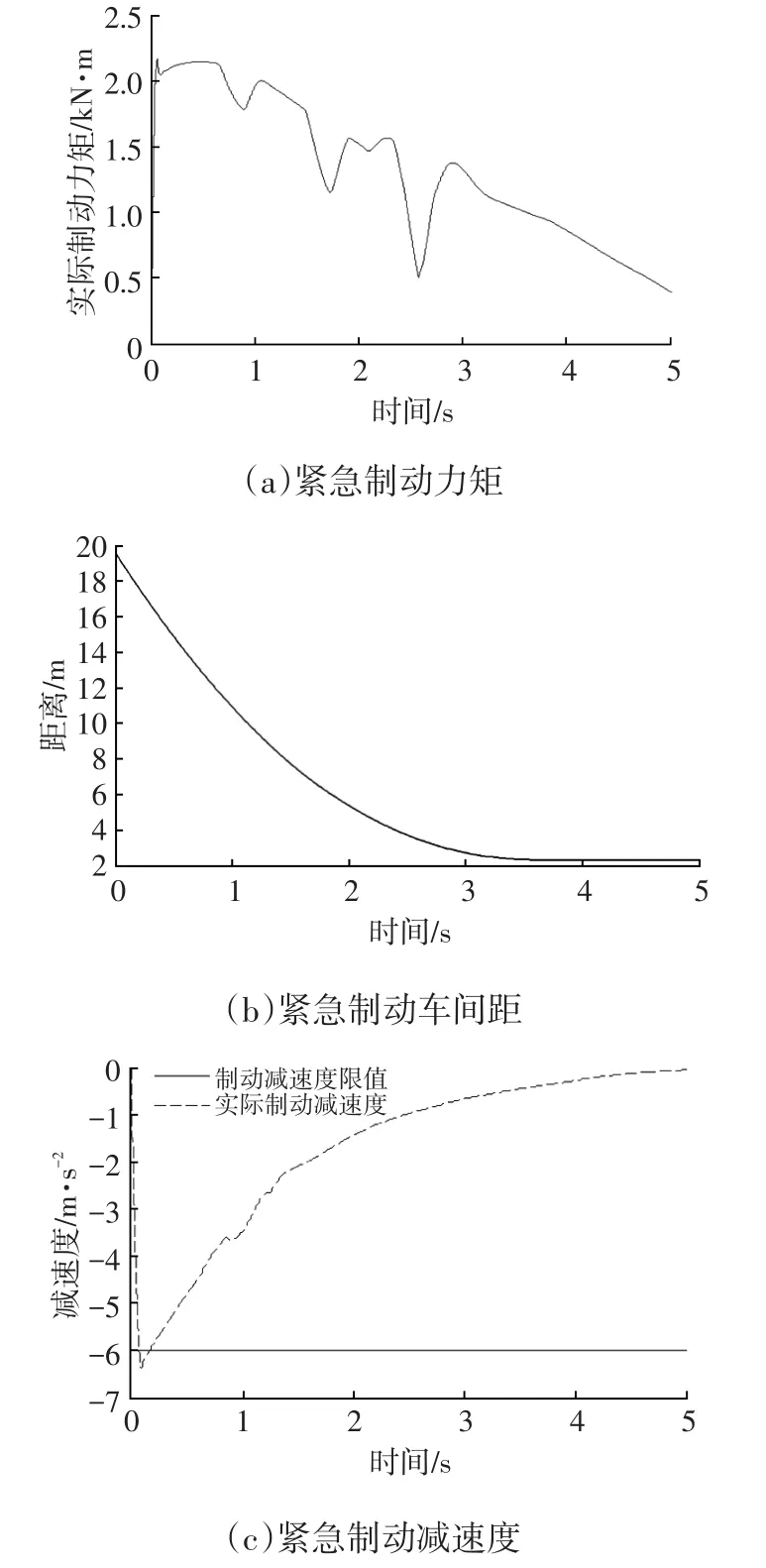
图12 工况1紧急制动避撞
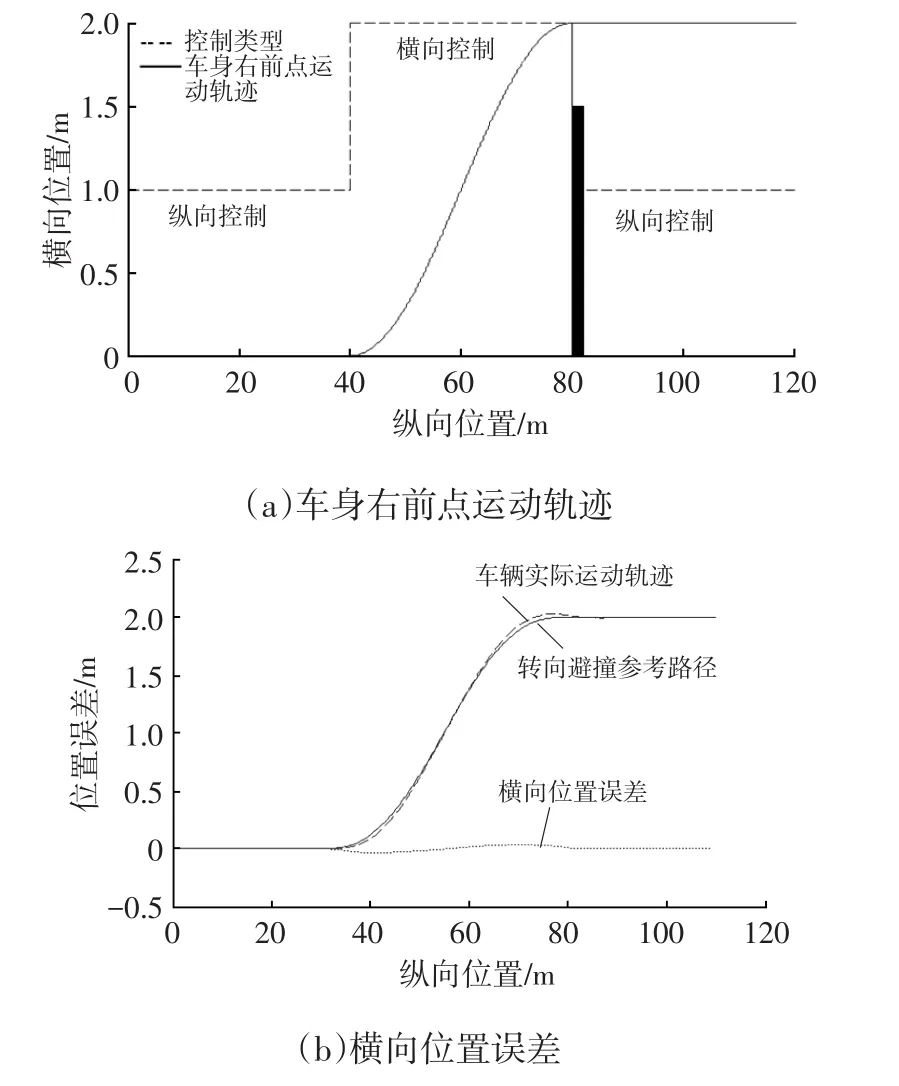
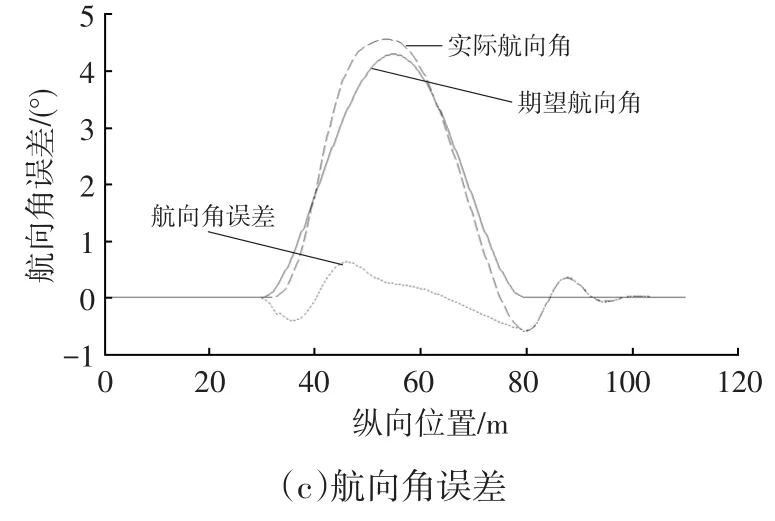
图13 工况2舒适转向避撞
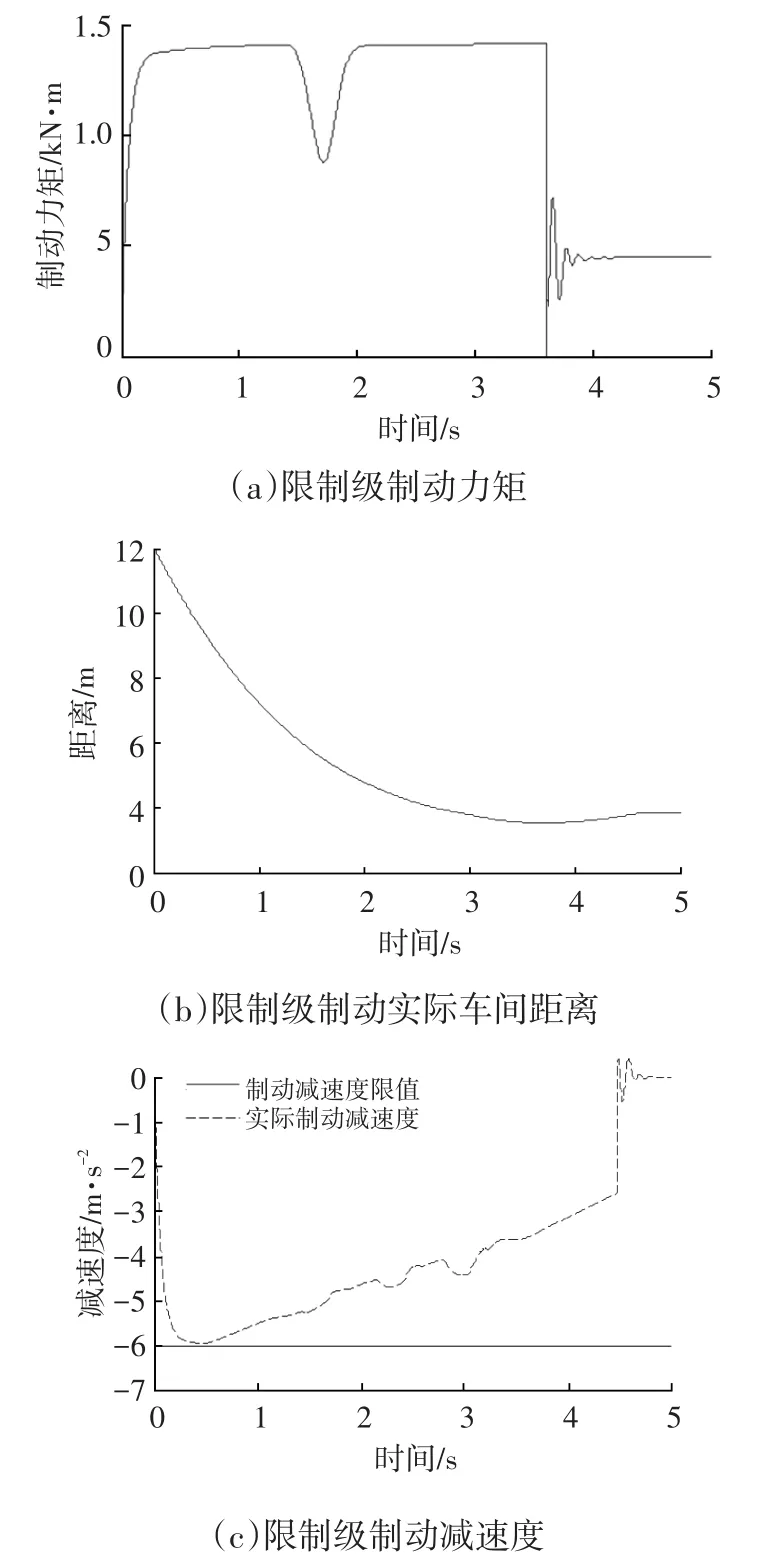
图14 工况3限制级制动避撞
为了进一步定量比较不同工况下车辆制动/转向避撞的有效性和舒适性,统计上述仿真结果中车辆与避撞参考路径的最大横向位置误差ecgmax、最大航向角误差θemax、侧向加速度峰值amax、侧向加速度均值amean和质心侧偏角峰值βmax[19]如表4所示。
由表4可以看出:当预留给转向避撞的时间为2 s时,ecgmax≤0.05 m,amean≤1 m/s2,βmax≤0.5°,各工况下的车辆转向动作可以良好地兼顾安全性和乘坐舒适性、转向稳定性;当车辆采取制动避撞时,相应工况下的车辆最大制动减速度都能保持在制动减速度限值附近,在确保制动安全的前提下,兼顾了不同制动强度下的乘坐舒适性。

表4 不同工况避撞评价指标
5 结束语
本文针对现有智能车辆仅采用制动方式避撞的不足,提出了融合制动/转向的避撞控制方法及决策机制,基于五次多项式设计了融合加速度约束的避碰参考路径,利用带预瞄路径跟踪控制对车辆横向运动进行控制,采用LQR控制器获得了被控车辆的期望加速度,基于动力传动系统逆模型得到期望节气门开度/制动力矩,构建了完整的智能车辆避撞控制系统结构,提出了基于TTC和THW危险评级的制动/转向避撞机制,通过试验确定两者阈值,并建立避撞决策机制。
仿真验证结果表明,本文提出的制动/转向决策机制能够充分发挥智能车辆的避撞潜力,进一步提高了智能车辆的主动安全性。后续将开展进一步的实车验证,并在车辆转向避撞控制中融入主动转向控制,以期进一步提高转向稳定性。
