基于径向基过程神经网络的航空发动机排气温度预测
2019-07-05陈庆贵李洪伟谢镇波
陈庆贵,李洪伟,李 明,谢镇波,谢 静
(海军航空大学青岛校区, 山东 青岛 266041)
航空发动机的涡轮排气温度(Exhaust gas temperature,EGT)是航空发动机状态监控最主要的性能指标。排气温度超温对发动机的危害较大。对于刚装机的发动机,其EGT值较低。随着发动机使用时间的增长,发动机的整体性能逐步衰退,其EGT值相应升高[1-3]。因此,通过对积累的EGT历史数据进行数据挖掘,及时预测EGT值的变化趋势,便可在一定程度上获得发动机性能衰退的速度,确定发动机的大致使用寿命。这对于监控航空发动机的性能衰退,节约维修成本,降低飞机的故障率具有重要意义。
1 基于RBF神经网络的数据挖掘算法
径向基函数(Radial basis function, RBF)过程神经元的聚合运算既包含了多输入的空间加权聚合和对时间过程的累积聚合。因此,可以用来处理具有时间累积效应的EGT时间序列[3-4]。
1.1 RBF神经网络结构

(1)
(2)
同理,隐层第j个过程神经元的核中心函数亦可表示为

j=1,2,…,m
(3)
由基函数的正交性和式(2)~(3),得
(4)
隐层第j个神经元的输出为
Oj=K(||X(t)-Xj(t)||)=
(5)
1.2 网络学习
给定K个学习样本:
2009年1 月-2017年6月我院肠球菌的临床分布及耐药性分析 …………………………………………… 郑巧伟等(10):1356
(x11(t),x12(t),…,x1n(t),d1) 、
(x21(t),x22(t),…,x2n(t),d2) 、…、
(xK1(t),xK2(t),…,xKn(t),dK)
设网络对于第k个样本的实际输出为yk,则网络误差函数可定义为
(6)
选取径向基核函数取为高斯函数,即
(7)
式中,σ表示m个中心函数的平均偏差,可由下式确定:
(8)

(9)
权值学习迭代式为
(10)
式中,s为学习迭代次数;η为网络学习效率。
1.3 学习算法步骤
1) 给定学习精度ε,累计学习迭代次数s=0,学习最大迭代次数N,选取输入空间标准正交基函数bl(t),l=1,2,…,L;
2) 按式(2)、式(3)将输入函数X(t) 和核中心函数Xj(t)(j=1,2,…,m)在bl(t)(l=1,2,…,L)下展开;
3) 按式(8)、式(9)计算σ;
4) 按式(4)计算||X(t)-Xj(t)||,按式(5)计算隐层第j个神经元的输出Oj;
5) 初始化网络权值wj(j=1,2,…,m);
6) 由式(6)计算误差函数E,如果E<ε转步骤8),如果s>N,转步骤9);
7) 按式(10)修正权值,s+1→s,转步骤6);
8) 选取另一学习模式,返回步骤4),直至所有学习模式全部提供给网络,网络收敛且输出误差E<ε;
9) 输出学习结果,结束。
2 EGT数据的预测挖掘
2.1 EGT数据预处理
选取某型发动机在一段飞行时间内的EGT数据,然后按照数据挖掘的三个步骤:数据准备、数据挖掘、结果分析与评价进行实施。首先,按照数据准备的要求,对采集的发动机EGT数据中的粗大误差进行去除,然后采用滑动平均法对数据进行平化处理。分别按照3点滑动平均法、5点滑动平均法和9点滑动平均法对数据进行平滑处理。采集的原始数据,3点滑动平均法、5点滑动平均法和9点滑动平均法平滑获得的结果如图2所示。其中,MSE和RMSE的计算结果如表1所示。
从图2和表1可以看出,n值选择过大,虽然可以十分有效地去掉时序中的随机误差,不过当时序数据发生变化时,处理后的值变化并不大,即这种处理难以反映时序数据中数据的变化,且偏离原始测量数据较大;若n值选择过小,影响效果恰恰相反,即虽然平滑处理后的值会随着时序数据的变化而变化,但是序列中的噪声不能完全消除。综合考虑数据的采集时间间隔,本文选择3点滑动平均方法。
2.2 基于RBF神经网络的EGT预测
利用RBF神经网络对3点滑动平均获得的EGT数据进行预测。首先,将获得的170个数据采用平移窗口的采集形式,取前5个数据作为输入样本,取其后的1个值作为输出样本,共得到165组输入输出样本,用其中的前160组数据作为训练数据,后5组数据作为测试数据。其中,扩展速率V_spread=200,获得的结果如图3所示。有关RBF神经网络预测输出与期望输出的误差见表2。

图2 EGT原始数据和滑动平均后的数据

MSERMSE3点滑动平均55.781 00.572 85点滑动平均257.349 91.230 49点滑动平均1 024.700 02.455 1
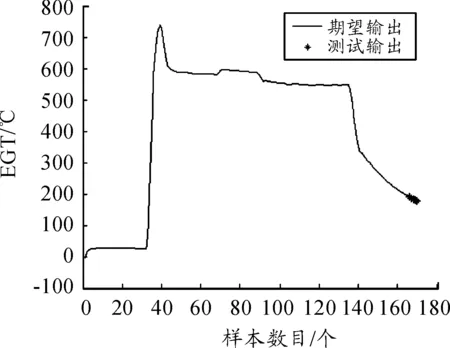
图3 RBF神经网络预测结果
对于RBF神经网络来说,不同的扩展速率对应不同的预测输出,下面研究不同扩展速率情况下RBF神经网络的预测结果。数据样本的划分方式不变,选取最后一个数据作为测试样本,扩展速率分别取为V_spread=1,16,25,50,100,200,计算结果如表3所示。

表2 RBF神经网络预测输出与期望输出

表3 不同扩展速率下RBF神经网络预测输出与期望输出
由表3的数据可以发现,扩展速率不同,RBF神经网络的预测输出不同。扩展速率值由1变化到200的过程中,预测输出值与期望输出值的差别先减小后增大。因此,在进行预测的过程中,需要选取合适的扩展速率值。
下面研究训练数据和测试数据数目不同的情况下,RBF神经网络的预测。这里,选取扩展速率为V_spread=16,预测结果如图4所示。不同训练样本数目下RBF神经网络预测输出与期望输出的误差见表4。
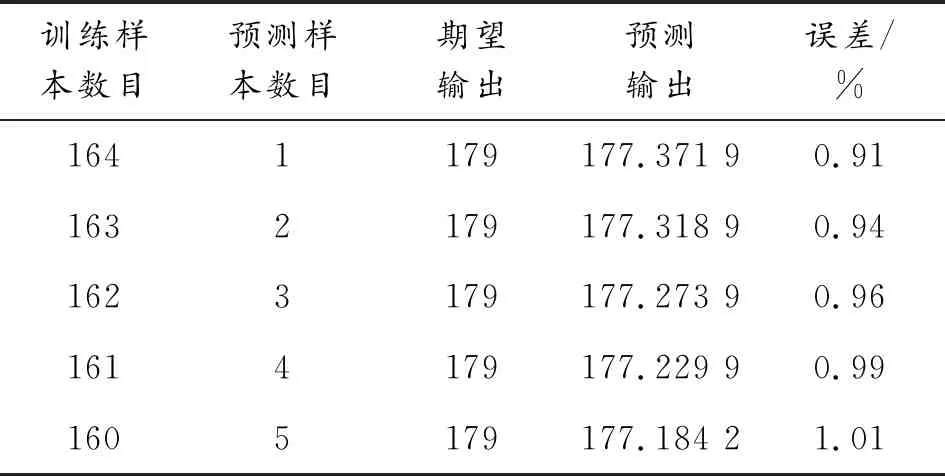
表4 不同训练样本数目下RBF神经网络预测输出与期望输出
由预测结果可以发现,训练样本数目越多,预测结果越精确。因此,在进行EGT预测时,采集的数据要尽可能多,以便更精确的进行预测。

图4 不同训练样本数目下RBF神经网络的预测结果
3 结论
1) RBF神经网络在训练样本数据较大且参数选择合适的情况下,能够满足EGT数据的预测需求,误差在2%以内。训练样本数据越多,RBF神经网络的预测精度越高,且RBF神经网络的预测精度还与扩展速率有关,需要在预测过程中选择合适的扩展速率值。
2) 由于RBF神经网络具有较好的稳定性,根据不同的性能参数选取合适的扩展速率值,该算法也可推广应用到航空发动机在不同工作状态下其他性能参数如发动机转速等的预测中。