悬挂式青贮圆捆包膜机的研究
2019-05-27张海滨刘希锋许骁博
张海滨,刘希锋,吴 昊,许骁博,徐 冬
(黑龙江省农业机械工程科学研究院,哈尔滨 150081)
0 引言
随着青贮行业的发展,相配套设备的发展也加快了步伐,对农机具机械特性也提出了更高的要求,也对设备的实用性、可操作性、便捷性和智能化提出了相应的要求。为此,结合笔者研制的自走式包膜机,采用同样的工作机构,改变支撑机构和动力输入方式,实现了设备的互换功能,提高了系列产品的标准化程度,可同时满足场地作业和田间作业。
1 总体设计
悬挂式青贮圆捆包膜机主要由机器悬挂架、夹抱机构、包膜工作台、拉伸膜供膜机构、夹膜切膜机构、液压系统和电控系统等组成,如图1所示。工作前,首先进行拉伸膜调整,设定好缠膜的层数,驾驶拖拉机移动到物料圆草捆位置,按动电子控制面板的自动1按钮,完成夹包、装载和包膜3个动作;包膜结束后,按动电子控制面板的自动2按钮,完成切膜、放包和回位3个动作;完成后,继续驾驶拖拉机移动到下一个圆草捆位置处,完成一个工作循环。
1.1 工作原理
悬挂式青贮圆捆包膜机采用拖拉机三点悬挂式,工作时,直接借用拖拉机的液压系统,将包膜机液压泵的两根外接液压管与拖拉机后侧的液压快速插头连接,通过多路阀分成3路:一路驱动液压马达带动包膜工作台旋转,工作台旋转的同时,通过齿轮传动带动工作台上的皮带旋转,实现草捆公转的同时自身保持自转,保证膜的均匀分布;一路驱动大液压油缸带动包膜工作台翻转,同时控制工作台的翻转角度;一路驱动小液压油缸驱动夹抱机构实现夹抱动作,通过控制油缸的伸缩来控制夹抱机构对圆捆的夹紧程度,实现草捆的装卸过程。具体作业方法示意图如图2所示。
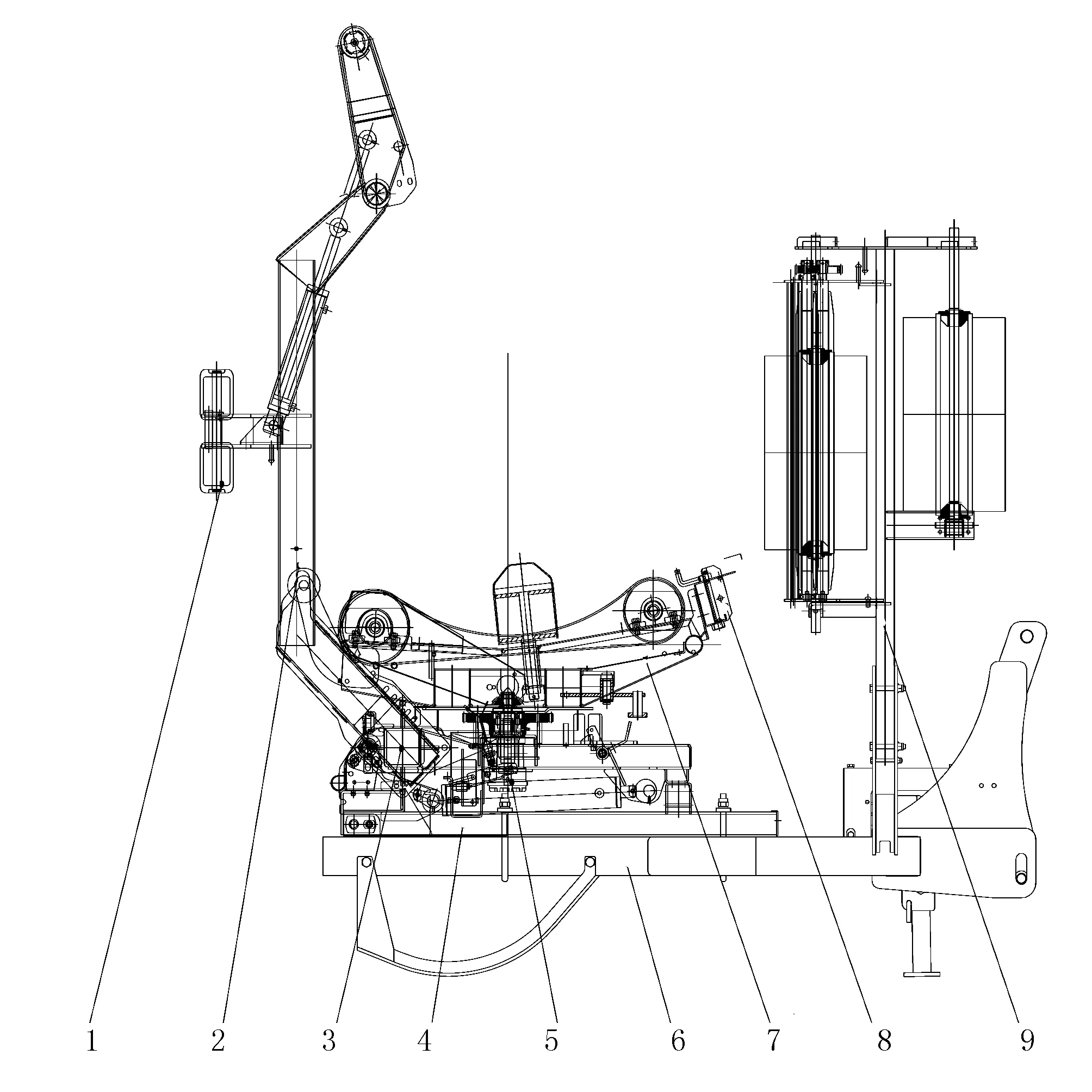
1.撑包装置 2.夹抱机构 3.翻转机构 4.工作台连接座 5.液压马达 6.机器悬挂架 7.包膜工作台 8.夹膜切膜机构 9.拉伸膜供膜机构图1 总体结构示意图
1.2 液压传动系统设计
考虑到液压传动能输出大动率,设计操作比较方便简单,动作灵活和传递效率高,且可根据实际需要,与传感器和工作机构等各部件一起使用,执行元件速度可控、转向可控,效率利用更高。本设备采用液压传动系统,直接利用拖拉机的液压系统,通过电动换向阀传递到圆捆包膜机的各个液压执行元件,根据不同工况要求,控制不同的执行元件,分别实现夹包、装载、包膜、切膜、放包和回位等6个动作,完成圆草捆整个包膜动作。液压传动原理图,如图3所示。

图2 作业方法示意图

图3 液压传动原理图
1.3 电控系统设计
目前,电子技术行业是主流发展行业,越来越多的技术引用了电子技术,液压技术也不例外。通过引入电子技术,液压行业发展迅速,尤其在农机多个领域,机电液一体化显示出了极大的优越性,提高了农业机械的工作效率、安全性能、操作性能和智能自动化水平,同时比较环保,节约了成本和能源。本设备考虑到了驾驶员的方便操作和安全,采用模块化控制系统,主要有主控盒、手柄和传感器组成。系统以高性能控制器为核心,采用线控的方式实现圆草捆的整个包膜过程。主控盒通过接收控制信号,经过运算输出执行信号,控制电液比例阀的开度,继而控制各个液压执行元件的动作,实现其功能。本设备考虑到不同的工况要求,设计了自动模式和手动模式。自动模式状态下,只需要按手柄操作按钮1和按钮2,设备就会依据设定好的程序,依次完成整个包膜过程;当出现自动程序意外中断时,本设备还可以转换到手动模式继续完成后续动作,减少了损失。按钮1和按钮2的动作顺序如图4所示。
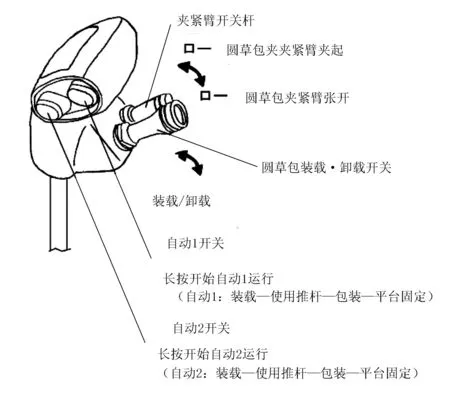
图4 手柄按钮动作顺序
本文设备主要在如下地方配置了传感器:首先在装卸草捆的过程中,工作台需要翻转,翻转角度需要合适,配置一个角度传感器,该传感器输出的电压值和角度成比例关系,电压变化时,角度即发生变化;对于不同物料的草捆和不同宽度的拉伸膜,包膜层数也有所不同,随之一个循环过程中包膜工作台的圈数也有所不同,配置了一个非接触式磁性传感器,工作台每转1圈,磁性传感器反应1次,直到达到设定好的圈数。
除了手动操作外,本设备还配置了控制盒,具体操作也可以通过控制盒的自动1和自动2按钮操作。此外,还可以通过控制盒的+和-,来调整包膜转数。
2 主要工作部件的设计
2.1 包膜工作台的设计
包膜工作台主要由机架、托辊机构、皮带、可调限位轮、公转机构、辅助辊和自转传动系统组成,如图5所示。
草捆的自转系统主要由托辊机构、皮带和自转传动系统组成。其中,托辊机构由两个不同直径的滚筒组成,大滚筒直径190mm,小滚筒直径165mm,结合设备允许的圆捆直径为850~1 000mm,两个滚筒中心的水平间距设计为765mm,垂直距离设计为45mm,两个滚筒的水平间距可根据草捆的直径进行适当的调节。在起驱动作用的大滚筒圆周面上对称布置了4处驱动点,增加了滚筒驱动力。两条橡胶带套在滚筒上,橡胶带的长度大于两个滚筒的距离,宽度为310mm。当捆放到工作台上后,通过手柄控制液压马达工作,液压马达将动力一分为二,一部分传递给工作台的公转机构,一部分传递给工作台侧面的自转传动系统,带动托辊机构工作;这样草捆在公转的同时又在自转,把膜分层均匀地包裹到草捆表面,直到设定的圈数。
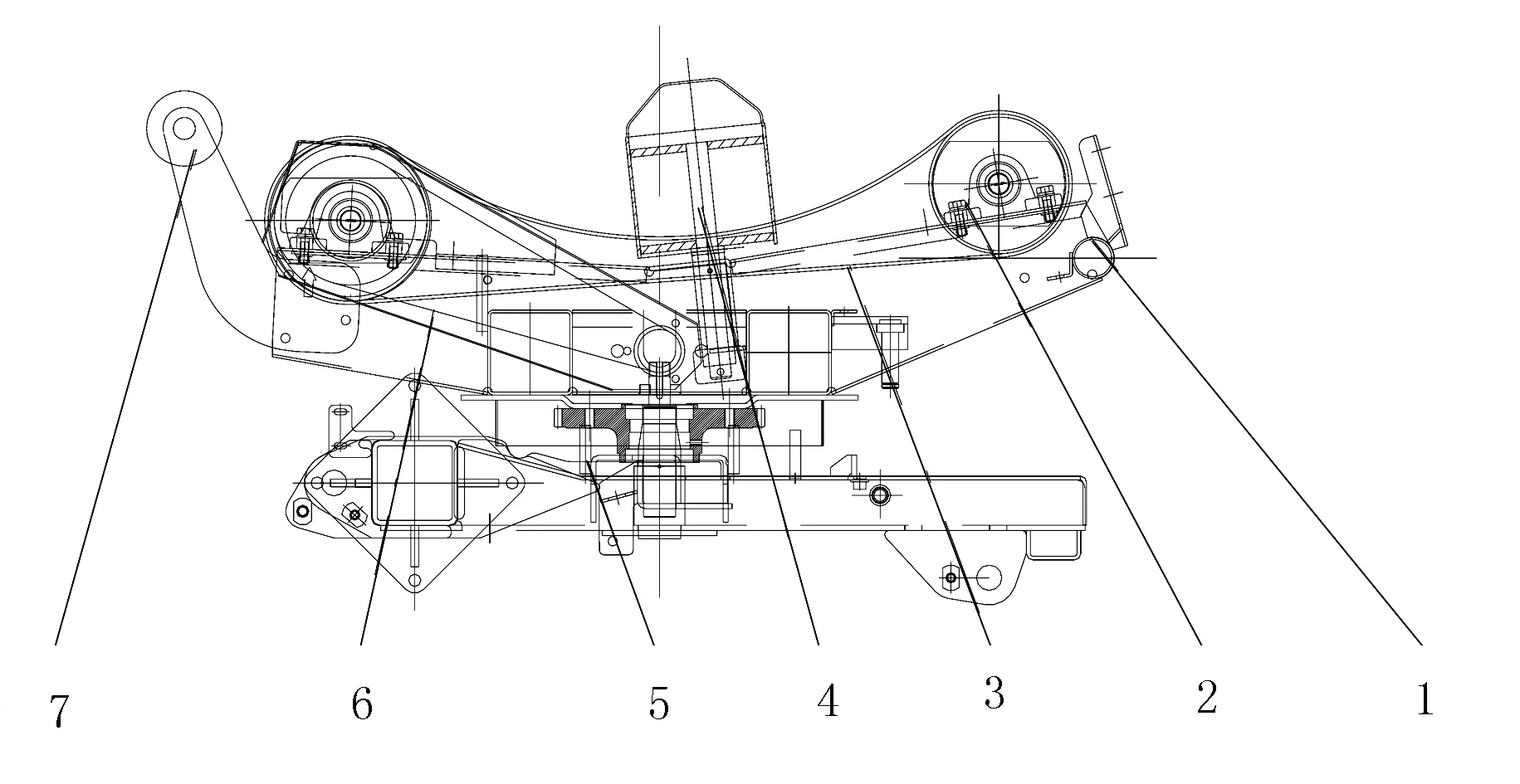
1.机架 2.托辊机构 3.皮带 4.可调限位轮 5.公转机构 6.自转传动系统 7.辅助辊图5 工作台结构示意图
在包膜过程中,由于拉伸膜出膜需要一定的拉力,且圆草捆在托辊带动下自转,很容易被拉动,影响包膜作业的进行。因此,设计了能够转动的限位轮,直径165mm,保证包膜过程中不会发生偏移。限位轮设计成可调的,两限位轮的中心距为1 080~1 211mm,可根据草捆的长度尺寸进行适当的调整,满足设备对圆捆不同长度的要求。该工作台还设计了辅助辊,在捡拾草捆和放包的过程,起到辅助作用,避免膜的破损。
2.2 夹抱机构的设计
包膜机在工作时,由于草捆的质量基本上在450~500kg左右,这种情况下捡包和放包人力无法完成,因此需要设计相对应的夹抱机构。
本文设计的夹抱机构由翻转台、大油缸、夹包大臂、夹持臂、撑包臂和小油缸组成,如图6所示。
操作者可根据不同的工况选择不同的作业模式,当捡拾草捆时,包膜机首先调整到草捆合适位置,按动操作按钮,大油缸开始工作,带动翻转台和夹包大臂翻转;同时,操作小油缸工作,张开夹持臂到最大位置,观察夹包大臂工作状态,在合适的位置,操作小油缸收缩夹持臂,直到夹住草捆为止;操作大油缸收缩,带动翻转台回位,此时捡拾过程结束。这个过程可以手动操作,也可以按自动模式1来操作。
包膜结束后,首先操作小油缸动作,收缩带动夹持臂靠到草捆一侧;大油缸动作,带动翻转台和夹包大臂翻转,一直到草捆翻转到指定的角度为止;小油缸动作,放开草捆,草捆落地,完成放包作业。其中夹持臂的回转半径为395mm,在夹持臂绕回转中心摆动过程中,夹持臂到工作台辅助辊的间距范围是635~1 425mm,这个间距范围能够很容易将直径850~1 000mm的圆捆捡拾起来。大油缸的支点和行程,既要保证在捡拾和卸载圆捆时省力,又要满足在两个极限位置处,满足油缸的行程。所以,本设备设计翻转台的中心到大油缸的中心距离为224.7mm, 在大油缸最大行程位置,翻转台能翻到最低位置,有助于装卸草捆,翻转台复位后,大油缸还没有到其最小行程位置,有助于实现翻转台的稳定。

1.翻转台 2.大油缸 3.夹包大臂 4.夹持臂 5.小油缸 6.撑包臂图6 夹包放包装置结构示意图
考虑到夹包机的后续作业连续性,设计了撑包臂,设置了两个位置,在不同的位置,草捆落地的状态不同,有平放和立放两种,可选择使用。撑包臂位置示意图如图7所示。

1.撑包臂 2.夹包大臂图7 撑包臂不同位置示意图
2.3 拉伸膜供膜机构的设计
包膜机的工作效果主要看草捆包膜的质量如何,需要保证拉伸膜能够平整地包裹在圆草捆上,紧贴在圆草捆表面,减少包裹内的空气,提高青贮发酵品质。要想达到这一目标,首先要保证拉伸膜从供膜机构出来,就要保证伸膜平整,且要求拉伸膜有一定的拉力,因此拉伸膜供膜机构的设计对于包膜过程十分重要。
本文设计的拉伸膜供膜机构由机架、拉伸膜固定块、拉伸膜固定轴、导膜辊、拉伸膜预紧机构和齿轮等组成,如图8所示。拉伸膜穿过拉伸膜固定轴,固定在上下拉伸膜固定块之间,膜绕过两个导膜辊,通过齿轮相互啮合,拉伸膜缠绕到圆草捆上,完成包膜过程。
拉伸膜固定块选用塑料材料,易于成型且对膜损伤小,固定块固定位置直径按目前市面常用的拉伸膜筒芯的内径设计为74mm。考虑到拉伸膜的大小规格常用的主要有500mm和750mm,拉伸膜固定轴设有两个档位,可以选装两种不同规格的拉伸膜。为了保证拉伸膜工作时平整,设计了两根导膜辊,导膜辊表面均匀包裹带竖纹的橡胶涂层,增加导膜辊对拉伸膜的摩擦力,既增加对拉伸膜的摩擦力,避免打滑,同时也对膜起到了保护作用,防止金属对膜的损伤。导膜辊的间距设计为80mm,既可以保证膜顺利穿过两辊之间,又避免了拉伸膜行程过长,减少褶皱。
为了提高拉伸膜的伸长率,设计两导膜辊不同的转速。其中,主动辊是小齿轮,被动辊是大齿轮,两齿轮齿数分别为15齿和25齿,传动比为1∶1.67,即主动辊的拉膜速度是被动辊的1.67倍,拉伸膜伸长量能达到原来的167%左右。为了适合不同品质的拉伸膜的使用,大齿轮也可以选用24齿的,则传动比为1∶1.6,主动辊的拉膜速度是被动辊的1.6倍,拉伸膜伸长量能达到原来的160%左右。这种设计能够增加拉伸膜的使用率,降低成本。

1.机架 2.拉伸膜固定块 3.拉伸膜固定轴 4.导膜辊 5.拉伸膜预紧机构 6.齿轮图8 拉伸膜供膜机构示意图
为了提高包膜质量,还设计了拉伸膜预紧机构,拉伸弹簧作用于安装橡胶张紧轮的预紧机构,橡胶轮在弹簧的作用下始终紧贴着拉伸膜,给拉伸膜一个摩擦力。这样就能保证导膜辊在导膜的过程中,拉伸膜一直保持张力,使拉伸膜能够紧贴圆草捆,提高包膜质量。
3 试验与结果
3.1 试验基本条件和方法
本文的试验材料选用黑龙江省蓬勃草业有限公司的MR1000型打捆机打成的直径和长度为φ1 000mm×850mm的高密度圆草捆,质量为450~500kg,试验装置采用自行设计的悬挂式青贮圆捆包膜机,动力采用迪尔的804拖拉机;拉伸膜采用包膜机专用的塑料拉伸膜,厚度为0.025mm,宽为500mm;试验场地在哈尔滨市南岗区黑龙江省农机研究院试验田进行。本试验采用场地固定作业的方法,现场准备50捆相同规格的圆草捆,分别对其进行包膜作业,测试工作台的回转速度、工作台托辊的自转速度、单捆包膜的时间(重复试验取平均值)、包膜合格率、包膜层数及装载能力等。
包膜合格率主要看其四周有无破损。包膜层数测试,随机抽取5 个包膜后青贮饲料包,在包的圆柱面上,随机选择一柱面高度,用刀片沿圆周方向划开1圈,均匀选5 点,查看包膜层数;在随机3 个包膜后草捆沿两个底面中心平行于圆柱轴线方向用刀片划开一圈,均匀选10 点,查看包膜层数(膜边缘重叠处除外),最少层数为包膜层数。装载能力测试,就是看最大捡拾能力。
3.2 试验结果
本包膜机试验结果,如表1所示。
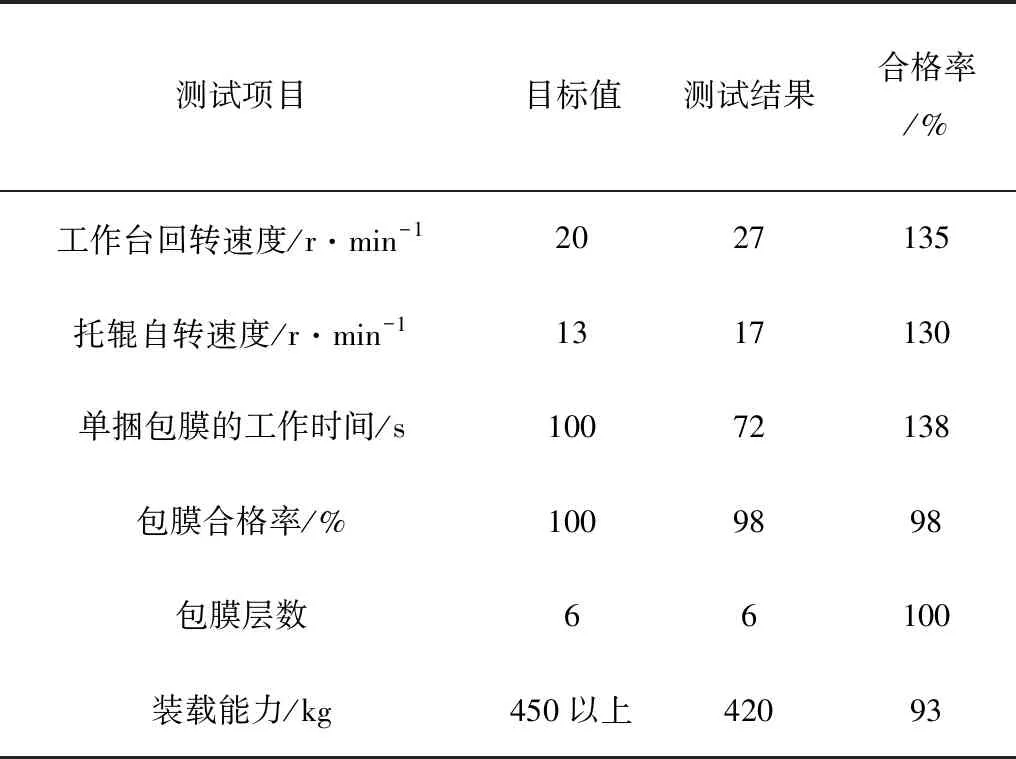
表1 悬挂式青贮包膜机试验性能结果
试验结果表明:①本文设计的包膜机单捆包膜的工作时间、工作台回转速度和托辊自转速度均超过了理论设计值,通过计算可得出单位时间上的生产率要远超过当时设计的要求;②本文设计的包膜机的包膜合格率达到了理论设计值的98%,破损原因主要是在卸捆过程中,草捆接触地面尖锐凸起,导致拉伸膜破损;③本文设计的包膜机在包膜层数完全符合理论设计值,表明拉伸膜供膜机构和工作台相对位置符合包膜的实际要求,能实现青贮饲料均匀的包膜;④本文设计的包膜机在装载能力上比理论设计值低,主要原因是由于配套的动力比较低,通过计算,最好选用73.5kW以上的拖拉机,能够满足设备的理论设计值。
4 结论
1)本文设计的悬挂式包膜机采用拖拉机三点悬挂模式,包膜直径范围大、结构简单、自动化程度高,主要通过液压和电控系统来实现控制,作业效率高,工作稳定性较好,性能参数能够满足实际作业需要,适合大规模作业。
2)本文设计的夹抱机构,可根据不同的工况选择不同的作业模式,通过液压分别控制大油缸和小油缸,从而带动夹抱大臂和夹持臂在一定范围内摆动,完成夹包作业。在卸捆环节,通过撑包臂不同的位置状态,可实现草捆不同状态的卸捆作业为后续的机械化作业,提供了多种选择。
3)本文设计拉伸膜供膜机构,采用了全新的拉伸系统,可实现单辊和双辊两种模式的不同切换、长膜和短膜的不同切换。本文设备设计两个导膜辊不同的转速,提高了拉伸膜的伸长率,拉伸膜伸长量提高到原来的160%~170%,增加了拉伸膜的使用率,降低了成本。
4)本文设计的电控系统,采用了手动操作和自动操作两种模式,根据不同的工作状况,选择合适的操作模式,简化了操作过程,操作者短时间内就能熟练,并能轻松设定包膜层数和其他各种操作。
