机动取土器取土杆结构的设计
2019-05-27闫世风何予鹏李明阳吴建中
闫世风,何予鹏,李明阳,吴建中
(河南农业大学 机电工程学院,郑州 450002)
0 引言
人类的生存离不开土壤,土壤是我们种植农作物、水果等不可或缺的基本条件[1]。从某种角度来说土壤也是有生命的,其质量的好坏,与我们所种农作物的质量和产量紧密相连。随着我国人口的增加,粮食的产量就必须加大以满足人口需求,这就促使农民大量地使用化肥,虽然能够增加农作物产量但也破坏了土壤结构,造成土壤的营养不均衡甚至匮乏、土壤板结等现象[2-3]。随着农业科学的发展,科学家越来越重视土壤的保护和修复,以增加其动力和活力,对土壤的研究有利于对土壤的保护及合理运用,对环境保护也至关重要[4]。
土壤的研究有时在土地表面取样,但大多数是在土地某深度进行取样[5],而不管是在土地表面还是在地表某深度,土壤取样都需要用到取土器。目前,所用取土器取土筒的直径大多在100mm以下[6],不同情况下对取土的直径要求不一样。以往换用不同直径取土的方法是换不同的取土器[7],需要做出不同规格的取土器。本文拟设计一种取土器,适用于不同取土直径要求下的土壤取样。
1 设计原理与结构
1.1 设计思路
以农用机动取土器为基础,将取土杆取土部分做成可拆卸的不同直径的取土筒,这样在用不同直径取土器取土时就不用换整个取土器,直接换入土端取土筒即可。该方法不仅节省了材料,降低了成本,且在实地使用时不必带多个取土器,只需带上所需取土筒即可,节省了人力的搬运,降低了劳动程度。图1为机动汽油机式取土器的整体结构。
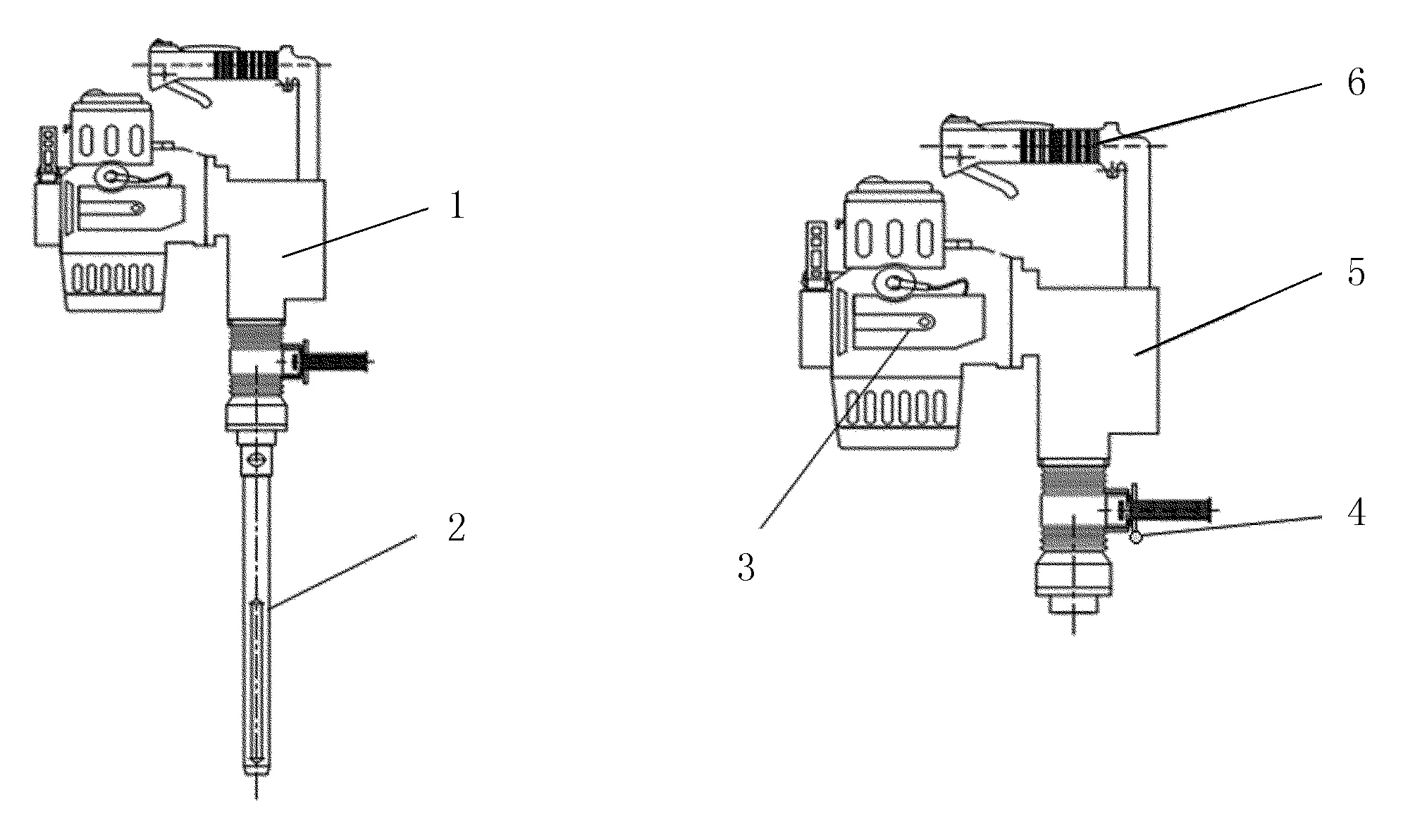
(a) 总体图 (b) 动力部分结构图1.动力部分 2.取土杆 3.汽油机 4.气缸 5.变速箱 6.手柄图1 汽油机取土器整体结构Fig.1 The overall structure of the gasoline engine soil collector
1.2 结构设计
将取土杆的一端做成连接座,与变速箱的锤击结构相连;另一端加工成内螺纹孔,螺纹直径为20mm,孔深为25mm。取土筒为长度为300mm,直径为30、40、60、80mm,一端开刃,另一端加工成带有螺栓的端面,螺栓直径为20mm,长为25mm,且在端面上加工3个直径为2mm的圆孔,以防止取土筒在入土工程中,压缩里面空气对入土造成阻力。同时,在取土筒的侧面开一个适当的U型槽,以便于取土后收集土样,如图2所示。取土筒尺寸参数如表1所示。
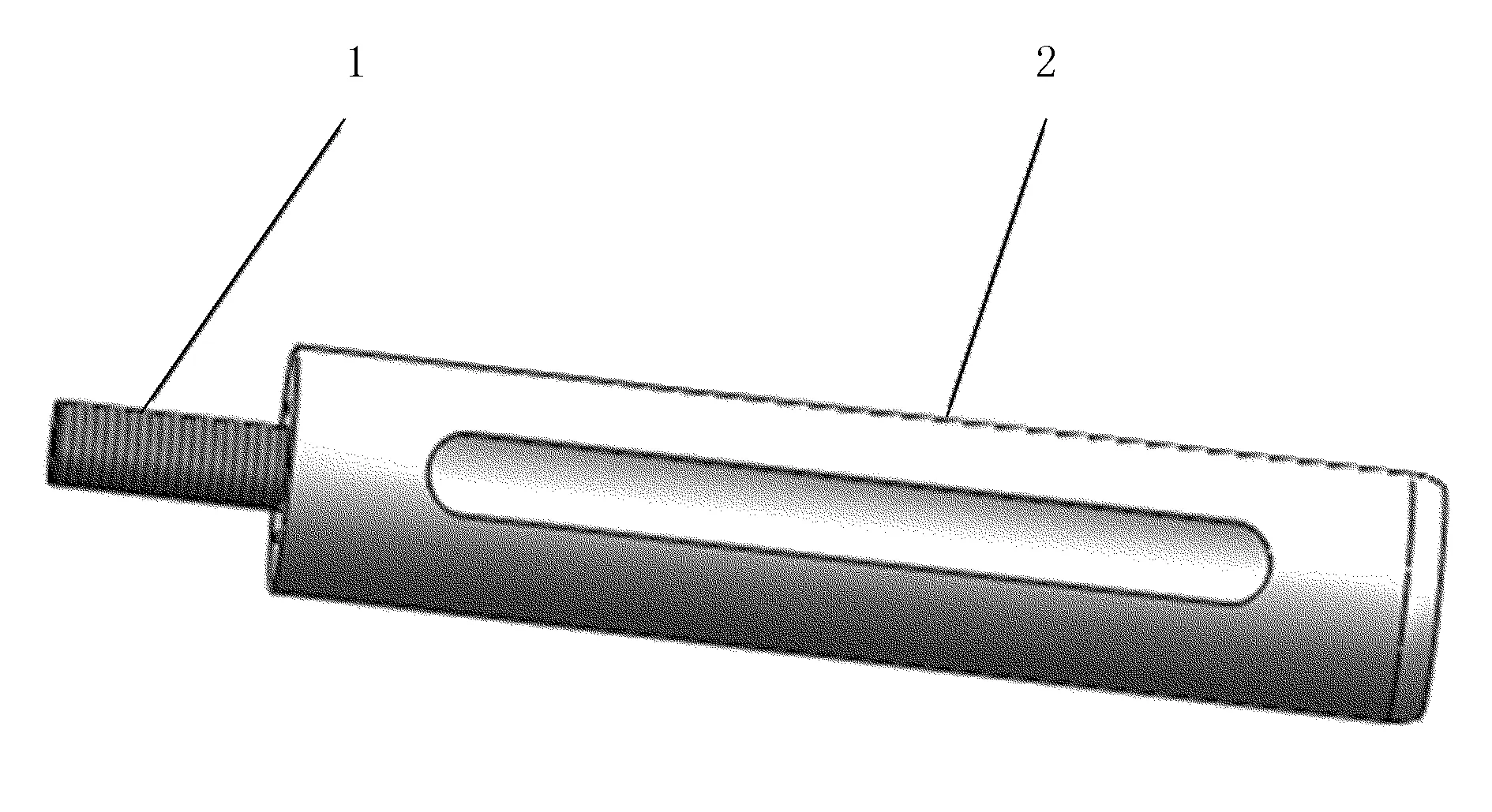
1.螺柱 2.取土槽图2 取土筒Fig.2 Soil tube表1 取土筒尺寸参数Table 1 Dimension parameters of the earth cylinder mm
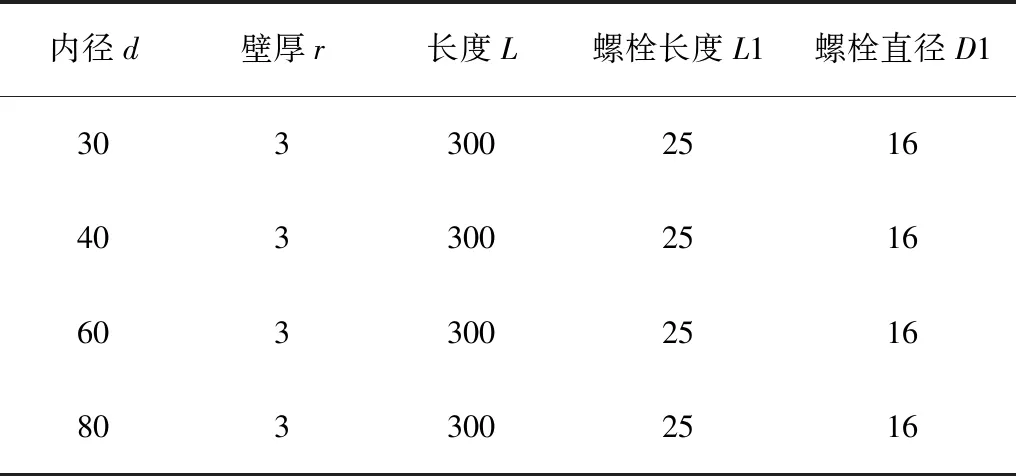
内径d壁厚r长度L螺栓长度L1螺栓直径D13033002516403300251660330025168033002516
取土时,先将取土筒和取土杆连接,以直径为40mm的取土筒为例,将取土杆连接座部分与动力机构相连,然后发动汽油机,进行取土即可。其连接过程如图3所示。
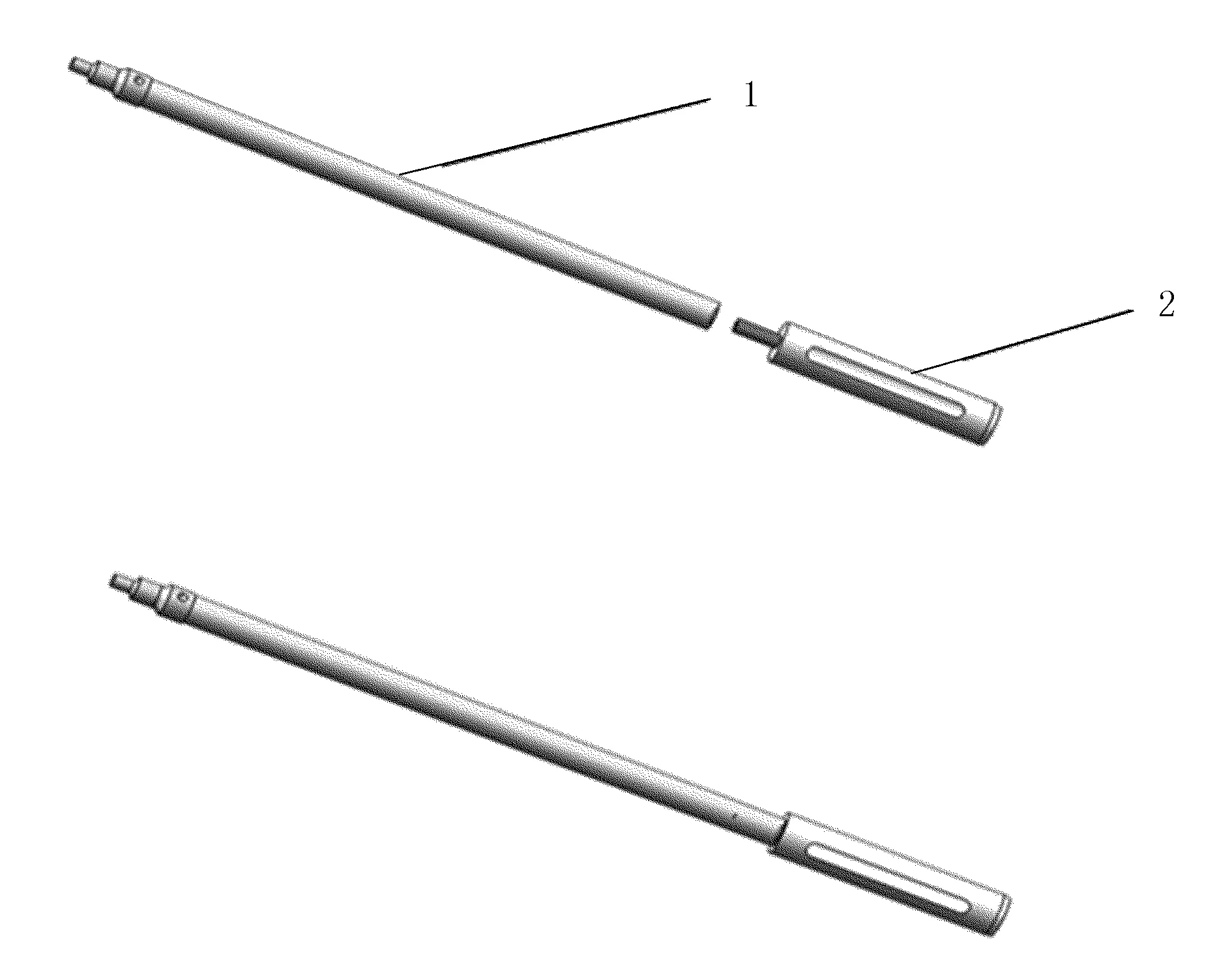
1.取土杆 2.取土筒图3 取土杆与取土筒连接图Fig.3 Connection diagram of soil rod and soil tube
2 受力分析及载荷计算
2.1 取土筒的受力分析与力学建模
取土筒实际是一段开口的钢管,入土时所受外力一直向下,方向不变,因此在贯入土中时可以按照开口钢管桩竖向承载力的计算方法计算[8]。其所受的力有:竖直向下的锤击力F,取土筒内壁与土壤的摩擦力f1,取土筒外壁摩擦力f2。其土壤同金属接触面之间的附着力几乎完全因水膜张力所造成,附着力也与土壤的质地、含水量、接触面材料和光洁度等因素有关。附着力在有水分时才有,但随土壤含水量的增加其值先增加后减少,其最大值与摩擦力相比小得很多,故可忽略不计。因取土杆与取土筒是空心的,力的传递都是通过杆壁传到筒壁上,忽略传递过程中力的损失,得到简化的取土筒入土时所受力的简化图,如图4所示。
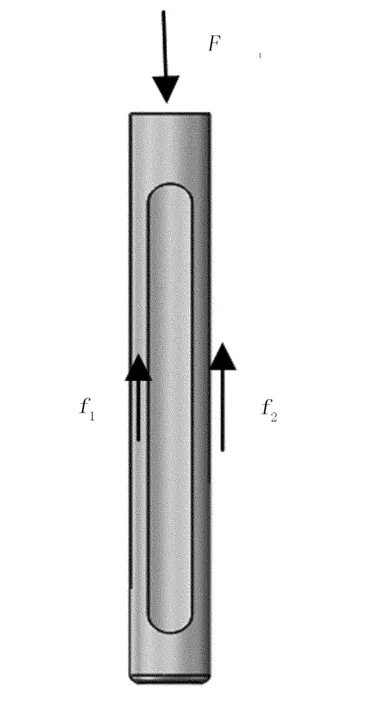
图4 取土筒入土受力图Fig.4 Take the earth cylinder into the soil
选择土质为粘土,根据“建筑桩基技术规范”中钢管桩摩擦力的计算方法[9]:钢管桩有效摩擦力f=桩周面积A×摩擦系数×土层厚度h。
此取土器取土深度在6m以内,以直径为30mm的取土筒为例,由表2可知:摩擦因数取16,取土器有效入土长度为取土筒长度为0.3m,忽略取土筒取土槽的面积,计算出f1和f2,故其和比实际摩擦力要大。
f1=π×0.03×0.3×0.3×16=135.5N
f2=π×0.033×0.3×0.3×16=150N
f1+f2=285.5N
2.2 动力载荷分析计算
在实际情况下,因电镐做功比汽油机输出动力稳定,取土杆受到冲击力更大,以电镐为例进行分析。采用高速冲击镐作为动力源,电镐的输入功率为1 580W,锤击频率为2 980次/min。取土时,电机带着其轴前端的一体式斜齿轮一起转动,使传动斜齿轮转动,斜齿轮又将圆周转动传递给曲轴,使由曲轴和连杆组成的曲轴连杆机构做偏心运动,然后连接在曲轴连杆上的活塞做直线往返运动;因活塞与撞锤之间为密封的空间,活塞压缩空气到一定程度时,撞锤也就跟着一起向后运动,直到撞击到冲击杆。如此这样循环实现对冲击杆的做功,如图5所示。取土杆前端的冲击座受冲击杆的周期性冲击力,其方向不变,大小在一定区间内,所受应力属于脉动循环。
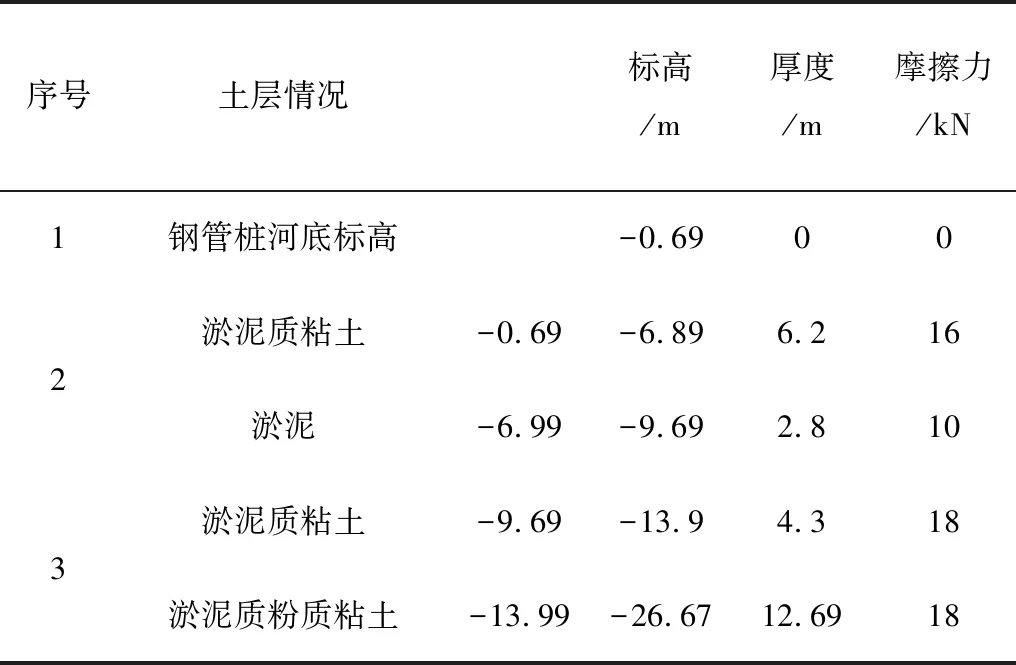
表2 建筑钢管桩基摩擦力参数Table 2 Friction parameters of building steel pipe pile foundation
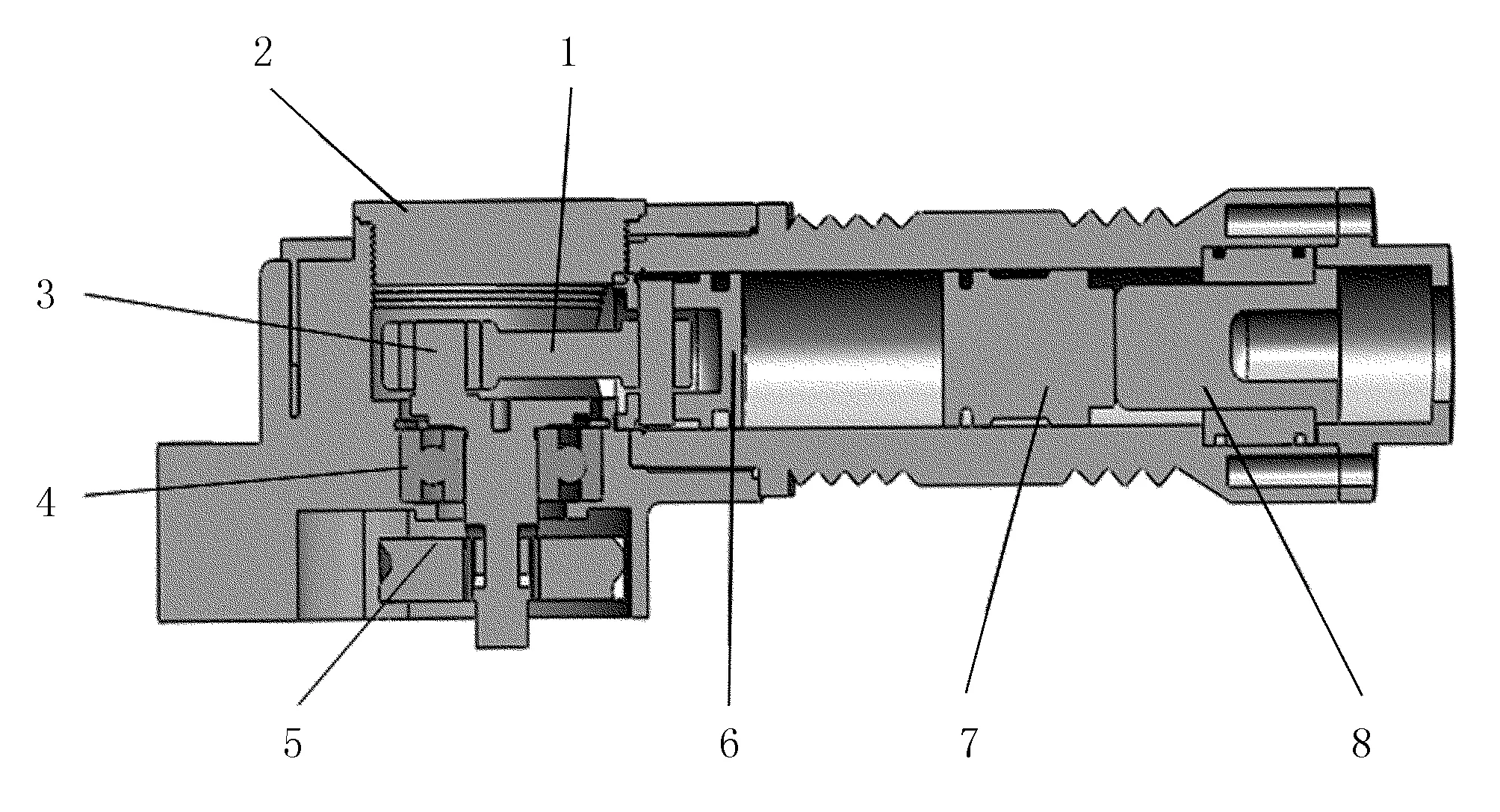
1.连杆 2.曲轴箱盖 3.曲轴 4.轴承 5.传动斜齿轮 6.活塞 7.撞锤 8.冲击杆图5 电镐冲击结构装配体图Fig.5 Assembly drawing of shock structure of electric pickaxe
计算电镐的冲击功参数,然后对取土杆进行受力分析,以电镐为例进行分析,使得取土杆所受冲击力更大。通过分析电镐冲击原理简图,得出其运动原理与对心曲柄滑块机构相似,如图6所示。
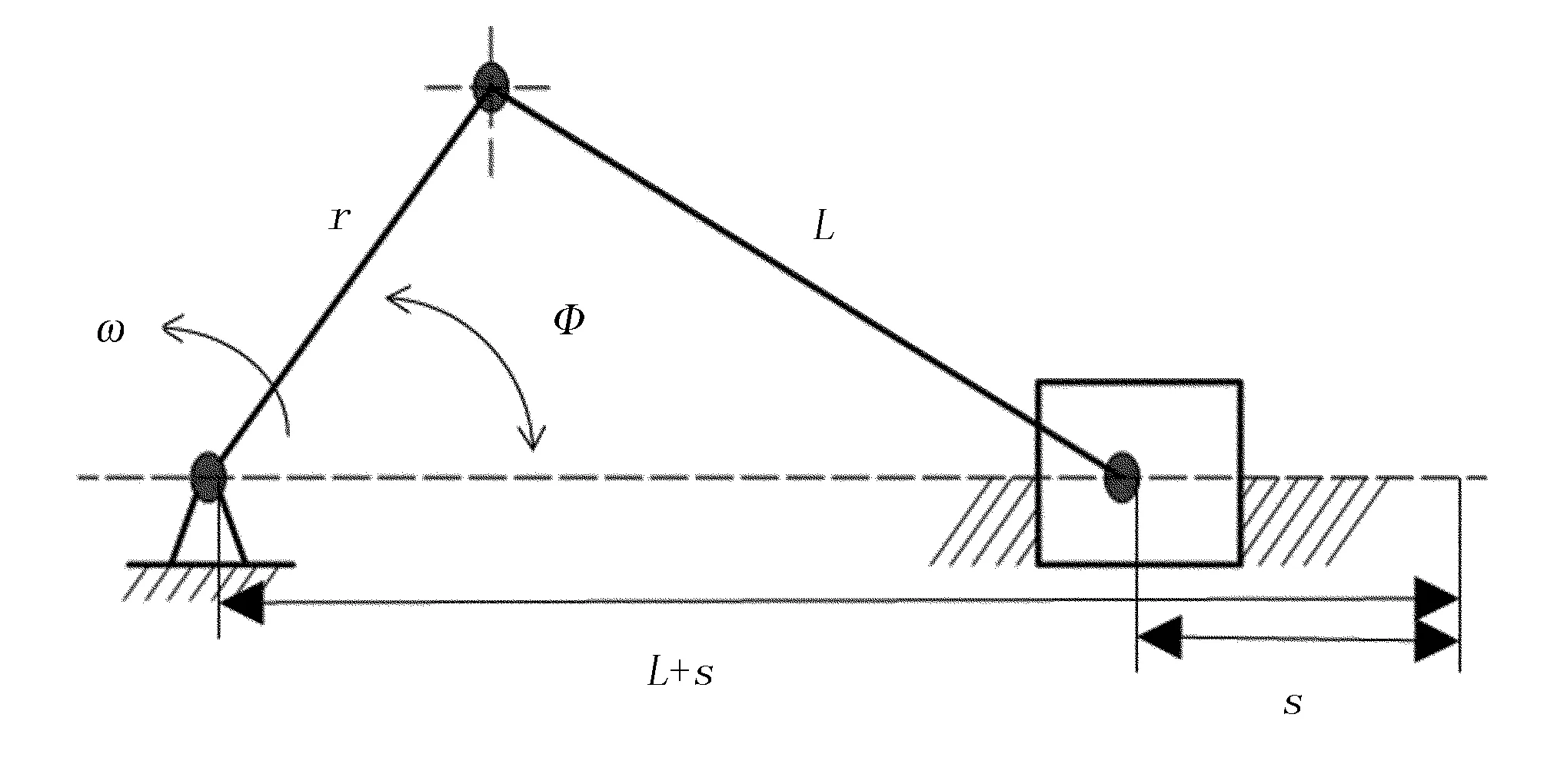
图6 对心曲柄滑块机构Fig.6 Heart crank slider mechanism
图6中,r为曲柄长度;ω为角速度;φ为曲柄转动角度;s为滑块位移;L为连杆长度。
为方便分析将电镐冲击运动的原理简图画出,简化后如图7所示。
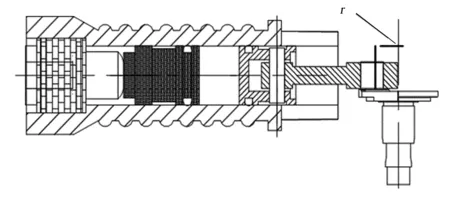
图7 电镐冲击原理简图Fig.7 Electric shock schematic
故根据“对心曲柄滑块机构”计算公式[10],则有
a=rω2(λcos2φ+cosφ)
s=λr/4[4/λr-cos2φ+1]
λ=r/L
式中a—滑块加速度;
R—曲柄长度;
ω—曲柄转动角速度;
φ—曲柄转动角度;
s—滑块位移。
由于活塞可以看作对心曲柄滑块机构中的滑块,假设活塞和撞锤做同步运动,则由变力做功公式有
把上面a和s带入上述公式,则
W=
在0~2π区间内求上式定积分,得
W=2m(ωr)2
其中,ω=πn/30,变形得
W=2m[(πrn)/30]2×10-7
式中W—冲击功(J/次);
r—曲轴偏心距(cm);
m—撞锤质量(g);
n—偏心轴转速(r/min)。
对冲击锤进行数次称重,然后算出质量m的平均值,m=183g,测量出偏心轴的偏心距r=1.4cm,偏心轴转速n=2 980r/min,代入上式得到冲击功为
W≈6.98J
由于电镐的活塞和撞锤在工作中是通过压缩空气传动的,不是刚性连接,所以活塞和撞锤的相位与运动曲线是不一样的,故上面计算的值和实际的冲击功有些许差别。
依据动能守恒定律有
在一次冲击过程中,活塞的锤击速度由最大变为0,设单程经历时间为t,则
撞击瞬间速度转化为0 m/s,由碰撞过程的动量定理得
mv=Ft
则可算出力F为
因在向下连续锤击时,电镐受重力作用也会对取土杆做功,且电镐锤击频率越大,其做功越多。电镐所受重力为F电=m电g=43N,则合力Ff=F+F电=361.4>f1+f2=285.5N,故取土器能够顺利入土。
3 取土筒的有限元分析
运用Ansys软件对取土筒进行有限元建模、划分网格、设置边界条件及结果后处理分析等,察看所设计的参数等是否符合要求,然后在试验中观察其是否与上述理论分析相符合。假设作用在取土筒的力大小为380N,将土壤看作刚体,若在该假设下取土筒强度等依然符合要求,则在实际情况中绝对满足条件。
取土筒采用201不锈钢,其材料参数如表3所示。
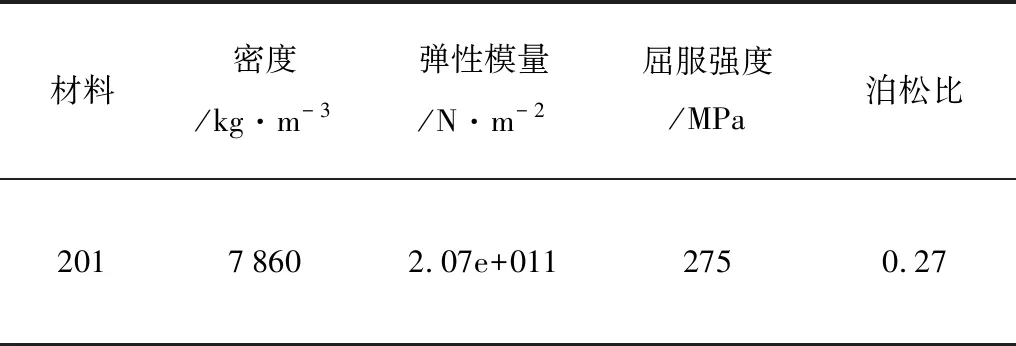
表3 201不锈钢参数Table 3 201 stainless steel parameters
对其进行相应操作后可得到总变形、应力和塑性变形云图,其结果如图8~图10所示。
由图8可知:取土筒在380N力的作用下,最大变形量为4.83×10-3mm,与其壁厚相比小得多,故可以看作无变形。
由图9可知:取土筒最大应力离取土槽两端较近,大小为2.81MPa,小于材料的屈服应力275MPa,强度满足,可以正常使用。
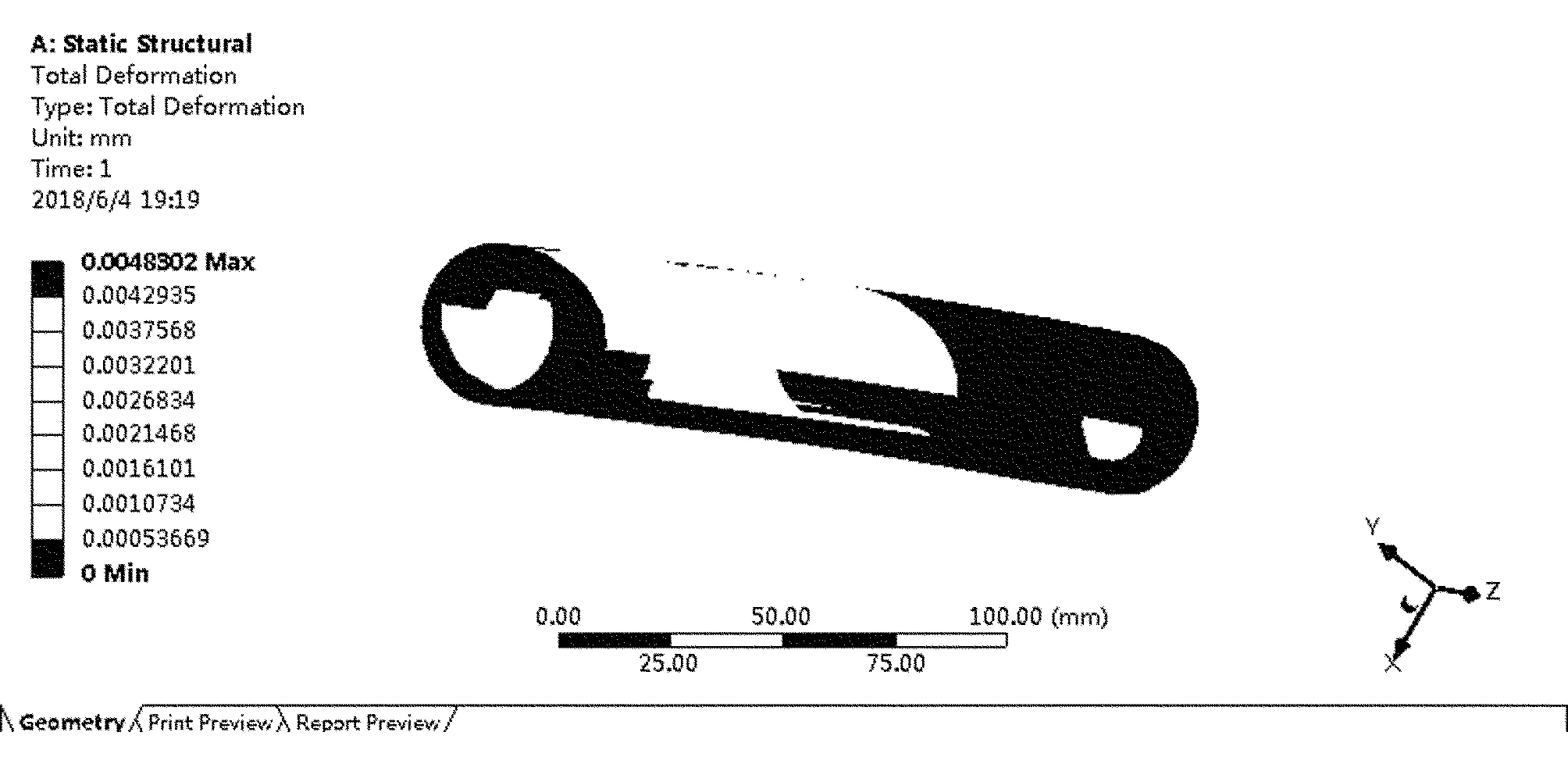
图8 总变形云图Fig.8 Total deformation cloud
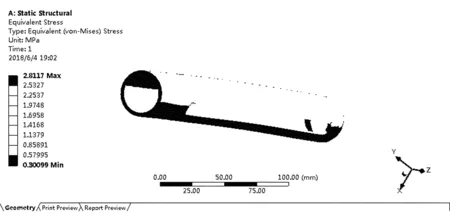
图9 应力云图Fig.9 Stress cloud
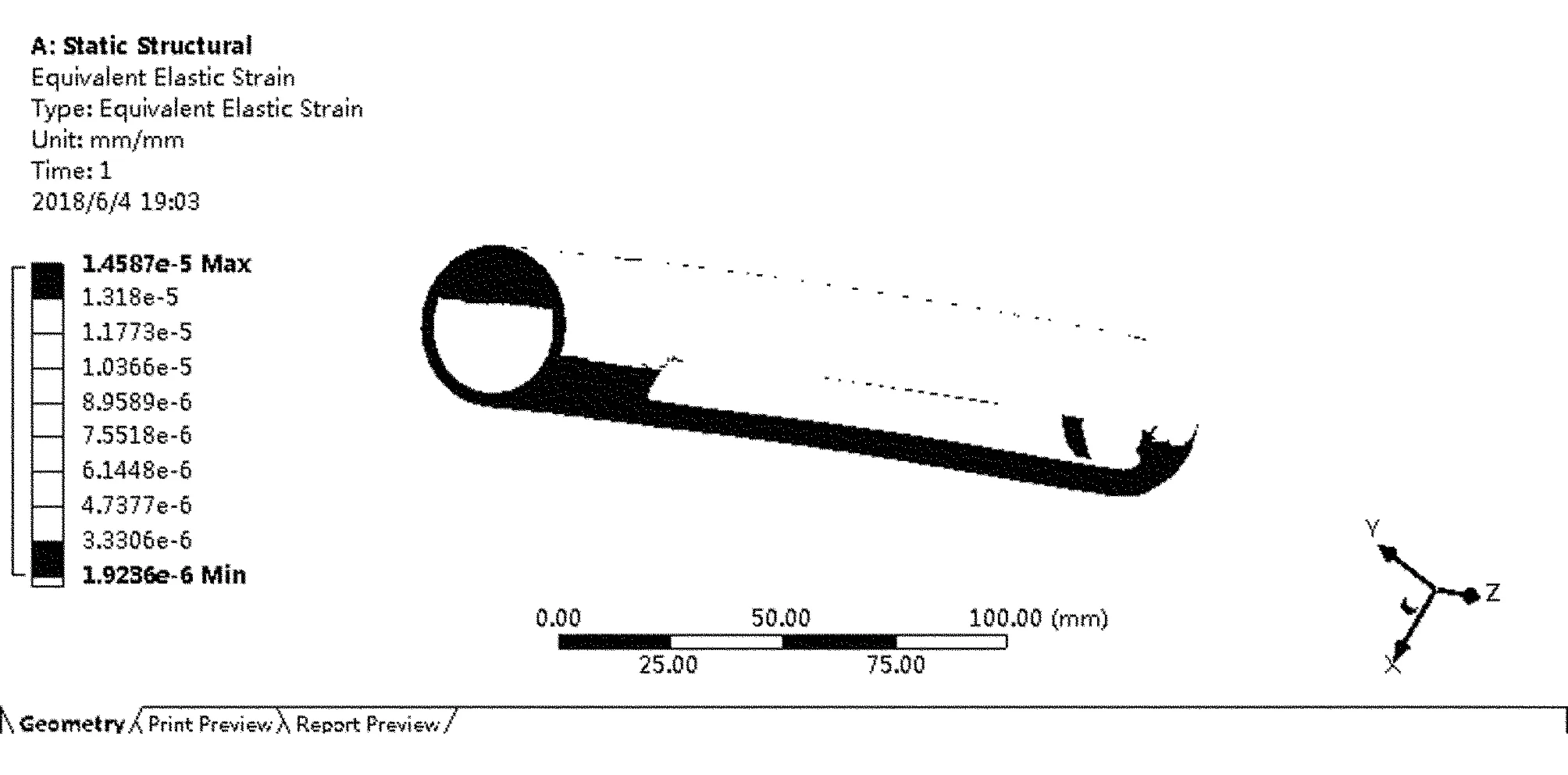
图10 塑性变形云图Fig.10 Plastic deformation cloud
由图10可知:该取土筒的最大塑性变形与最大应力处在同一位置,最大变形量为1.46×10-5mm,因而相比与壁厚及长度不会对结构造成影响。
对该模型进行模态分析,分析在某处频率结构的变形量最大,即对取土筒破坏最大,以便于设计汽油机频率时避开此范围内频率。本次模态分析只分析其前6阶模态(见图11~图16),分析结果如表4所示。
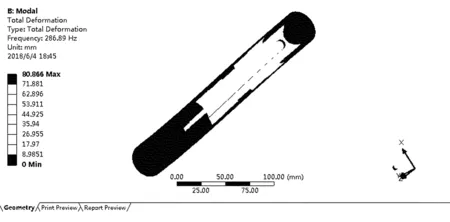
图11 1阶振型云图Fig.11 The first cloud mode
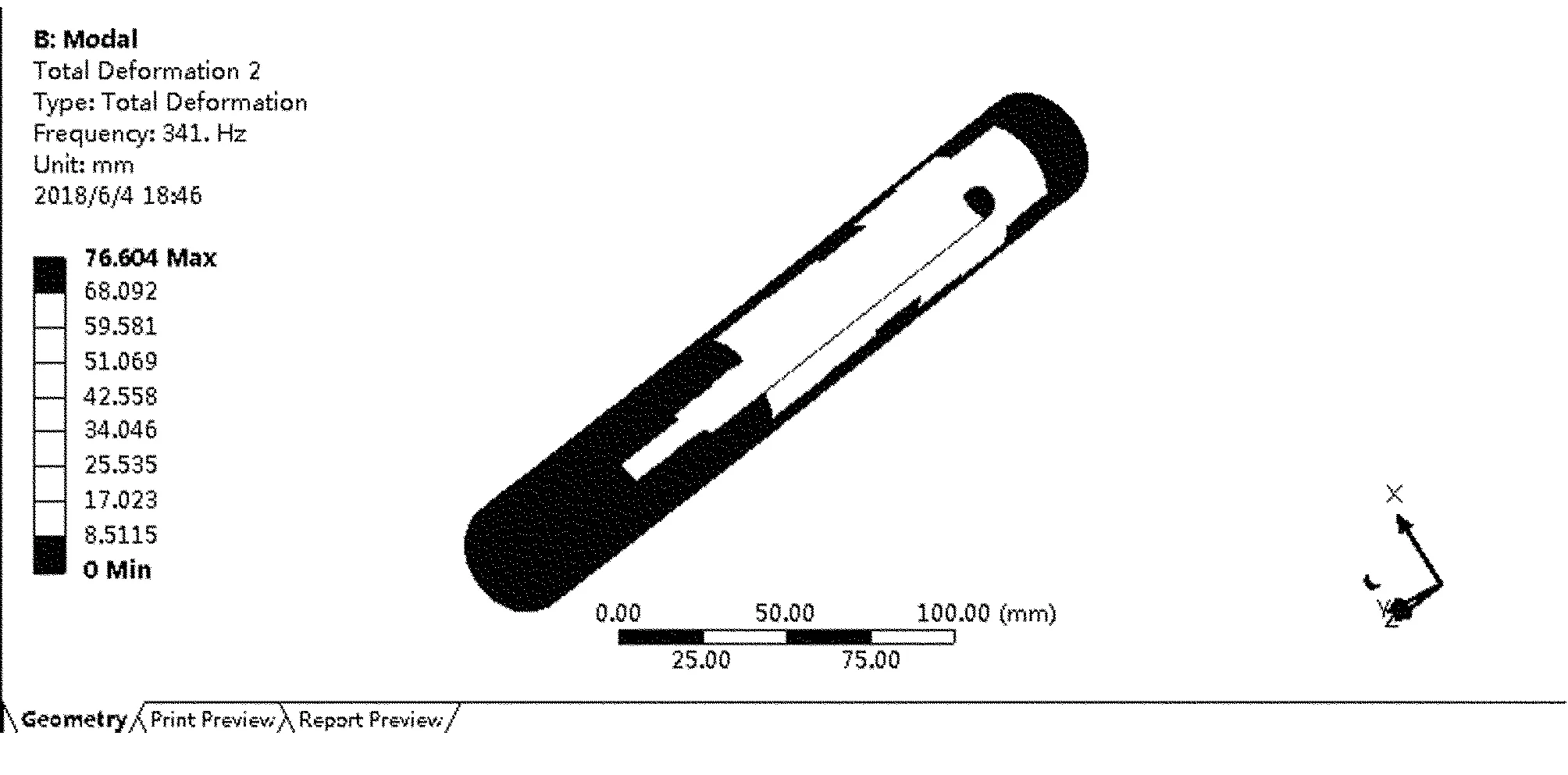
图12 2阶振型云图Fig.12 The second cloud mode
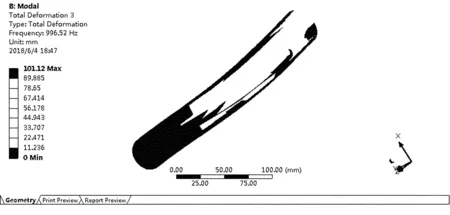
图13 3阶振型云图Fig.13 The third cloud mode
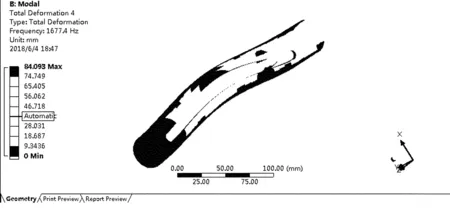
图14 4阶振型云图Fig.14 The fourth cloud mode
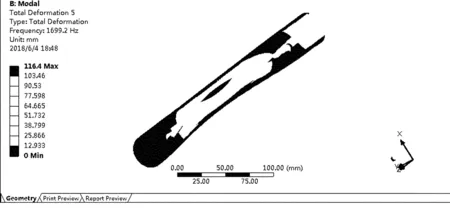
图15 5阶振型云图Fig.15 The fifth cloud mode
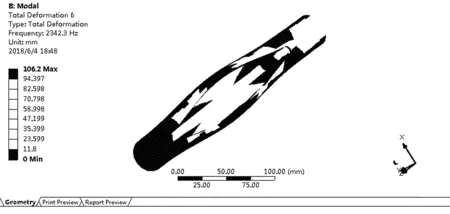
图16 6阶振型云图Fig.16 The sixth cloud mode
从取土筒的前6阶模态云图中可以看出:取土筒的1阶、2阶、3阶模态的振动频率对取土筒的前端,即受力端的破坏比较大,且随着频率的增加,变形量呈现了减小、增加、减小、增加的状态;第5阶变形量达到最大,随后又减少;到4阶模态时,取土筒结构变形较大的地方从前端移到取土槽附近,5阶、6阶也是对取土槽处的破坏较大,而频率到第5阶时破坏最大。
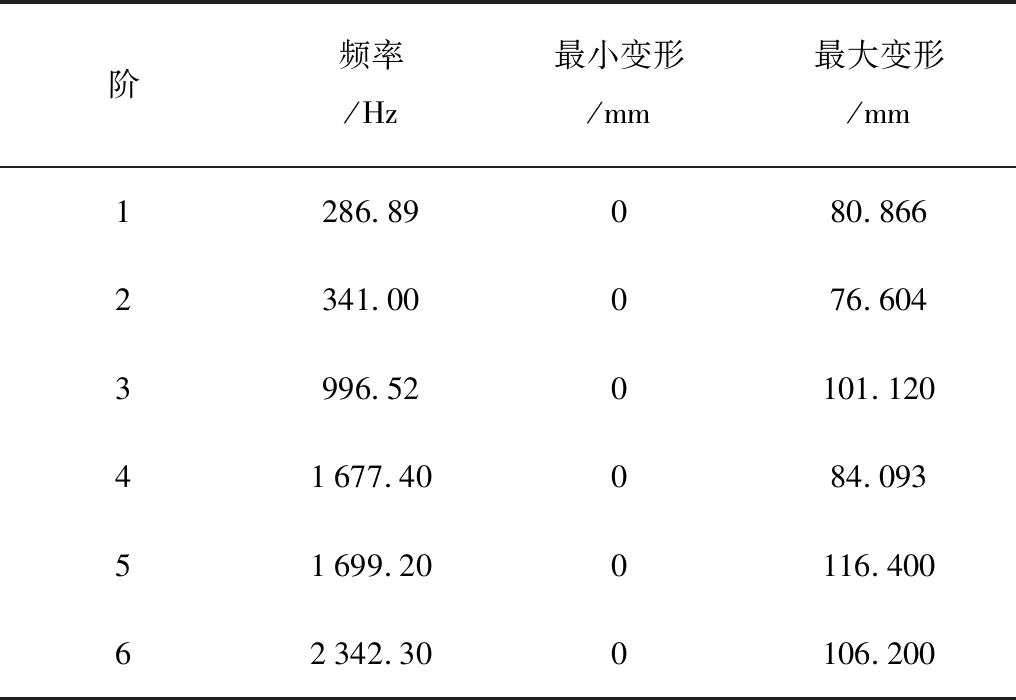
表4 前6阶模态分析结果Table 4 Results of the first six modal analysis
本文取土器的转速n=2 980r/min,由公式n=60f计算得,f=48.2Hz,远小于前6阶的模态振频,这说明在该频率下,取土筒不会出现共振,即不会因共振现象对其结构造成较大破坏。
4 试验验证
本试验采用机动式汽油机为动力,并用最大直径为80mm的取土筒进行试验,试验地点为河南农业大学三区实验区。试验结果表明:取土筒能够顺利入土,且相较于之前的取土方式,取土更快、更均匀,更易于将土壤从取土器中取出,不会因所取土样过多造成取土费时的现象,也减少了从取土筒取土时人力的消耗;通过更换不同规格的取土筒能够满足不同土样直径的要求,避免了换用整个取土杆的情况。本试验的取土效果图如图17所示,表5为试验的相关数据。

图17 取土器取土效果图Fig.17 Earthing equipment to take soil effect map
从表5可看出:随着入土深度增加,在频率不变的情况下,入土速度稍有加快,原因是因下面土壤比土表土壤湿度大,紧实度小,相对松散,土样的原状性也较第一次取土好。
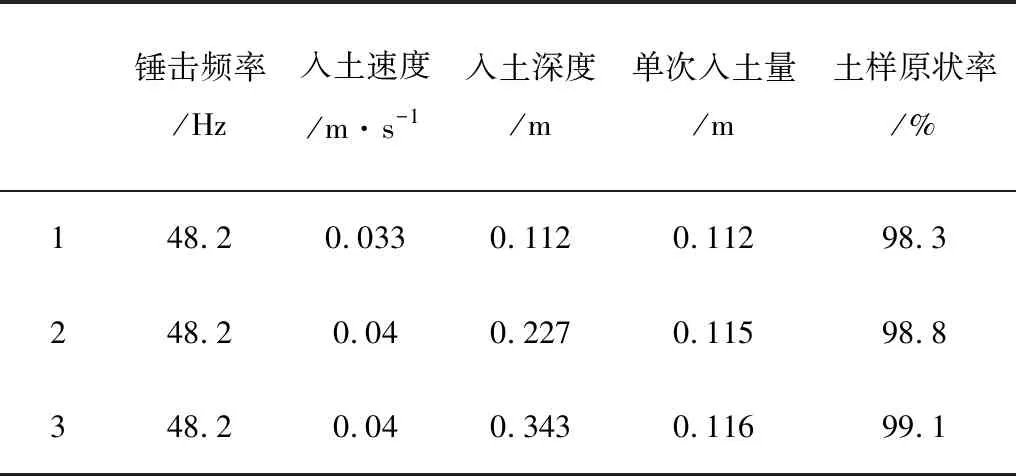
表5 取土器入土的相关数据Table 5 Related data for earth ploughing
5 结论
1)根据取土器的自身特点,重新设计了其取土杆的结构,将取土部分改为可拆卸的取土筒,可通过更换取土筒满足不同取土规格的条件,避免了更换整个取土器的麻烦。
2)通过对取土筒受力分析与建模,利用Ansys软件对其进行有限元分析,得到相应条件下的总变形、应力等云图,发现其强度等满足各条件。分析了该结构的前6阶振型,验证所选用汽油机的频率不会与取土筒结构形成共振,避免了因共振对取土筒造成的破坏。
3)试验表明:所设计的取土杆结构能够满足顺利入土,且深度越深,取样速度及土样原状性保持越好,能够满足取土性能的基本要求。
