一种改进型指数趋近律的永磁同步电机滑模控制
2019-03-26王毅波
王毅波,曹 宽,李 彪
(中国航天科技集团第十六研究所,西安 710100)
0 引 言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有结构简单、功率因数高、调速范围宽等优点,广泛地应用于航空航天、数控机床、仪器仪表等领域。PMSM作为一个强耦合、非线性的复杂系统,在外界扰动较大或内部参数变化较大的情况下,使用传统的PI调节很难满足高性能控制要求。因此,近年来,越来越多的现代控制理论被用来提高PMSM的控制性能。其中,滑模控制以其对参数变化及扰动不敏感、鲁棒性强、响应速度快等优点,得到了广泛应用[1-3]。但是,滑模控制存在着抖振现象,为此,学者们提出了很多解决方案,我国学者高为炳首先提出趋近率的概念,改善了趋近运动的动态品质,后续学者们对趋近律方法进行了深入研究:文献[4]为适应符号函数的变化,设计了新型指数函数,提高了系统的动态、静态特性;文献[5]在变速幂次组合趋近律基础上,加入了抗积分饱和控制,抑制了电机速度的超调量;文献[6]用饱和函数代替符号函数解决滑模控制中的抖振问题,给控制器输出信号乘以饱和函数解决积分环节导致的滞后问题;文献[7]提出了一种双幂次组合函数趋近律,缩短了状态变量收敛时间,减小了稳态误差;文献[8]向幂次趋近律中加入指数项和系统状态变量,拟制了系统抖振;文献[9]提出采用多段滑模面并对每段都进行设计以严格控制系统在滑模面的运动,该方法涉及滑模面多,系统的物理实现具有一定难度;文献[10]基于反双曲正弦函数,根据系统的状态变量、采用变带宽趋近方式,提出一种新型趋近律,抑制了系统超调。
本文在以上研究的基础上,对传统指数趋近律进行改进,使运动点在离滑模面较远时能以更快的速率趋近,以缩短系统收敛时间,而当运动点靠近滑模面时能降速并平稳切入,以削弱系统抖振;并对符号函数进行了平滑处理,削弱了状态变量到达原点前的抖振。通过仿真验证了改进后算法的有效性。
1 PMSM数学模型
对于实际中普遍应用的表贴式PMSM,假设磁路不饱和,磁滞和涡流损耗不计,空间磁势和磁链呈对称正弦分布,在采用id=0的磁场定向控制( Field Oriented Control,FOC)时,d-q坐标系下的数学模型为
(1)
式中,ud、uq为d、q轴电压;id、iq为d、q轴电流;Ls、R为定子电感和定子相电阻;Pn为极对数;Ψf为转子永磁体磁链;ω为转子机械角速度;TL为负载转矩;J为转动惯量。
为了便于控制器设计,可变换PMSM数学模型如下:
(2)
2 基于趋近律方法的滑模控制器设计
2.1 新型趋近律方法
传统的指数趋近律为

(3)
其中,qs为纯指数项,εsgn(s)为等速项。等速项εsgn(s)使得消抖和缩短收敛时间之间存在矛盾:若增大ε,正常运动阶段收敛速度加快,但滑动模态阶段抖振也会增大;若减少ε,滑动模态阶段的抖振减弱,但正常运动阶段收敛速度则会变慢。并且因为ε>0,系统从理论上并不能完全消抖。
为了改善上述问题,本文对式(3)进行如下改进
(4)
对比式(3)和式(4)可以看出,纯指数项不变,仍然符合指数趋近律参数的设计原则。区别是向等速项中引入了速度误差的绝对值|x1|,当运动点离滑模面较远时,|x1|较大,运动点在新等速项和指数项共同作用下,以更快的速率趋近滑模面;接近滑模面时,指数项qs变小可降低运动点速度(随后趋于零而失效),新等速项进一步减小运动点速度,从而使运动点以更低的速度平滑进入滑模面,随着|x1|逐渐减小,运动点的振幅ε|x1|呈衰减走势,最终稳定于原点。
2.2 消抖处理
符号函数sgn(s)是不连续的,它是系统抖振的一大因素,这里对其进行改进,如式(5)所示:
(5)
令参数σ=0.008,将改进后的符号函数和原符号函数进行对比,如图1所示。
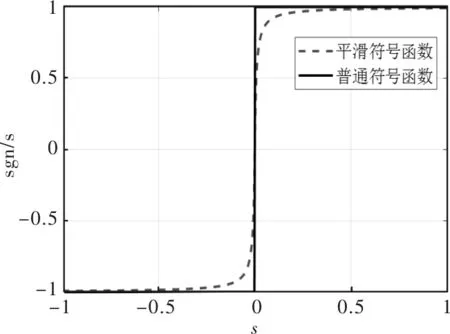
图1 两种符号函数对比
从图1可知,参数σ的引入使符号函数变化平滑了很多,可以有效的削弱普通符号函数因跳变而引起的系统抖振。
2.3 滑模速度控制器设计
将PMSM调速系统的速度误差eω及其导数dω/dt分别定义为系统的状态变量x1、x2,即
(6)
式中,ωref为参考转速,通常为一常量,ω为反馈转速。根据式(2)和式(6)可知:
(7)

(8)
本文采用线性滑模面:
s=cx1+x2
(9)
式中,c>0为待设计参数。
对式(9)两侧求导,可得:
(10)
由式(7)、式(9)、式(10)可以求得控制器的输出表达式为
(11)
从而得到q轴电流给定为
(12)
2.4 稳定性分析
(13)
对式(13)两侧求导,并将式(7)带入,考虑到ε、q>0,可推出:
(14)
可知,新的滑模控制器满足可达性条件。
3 仿真及结果分析
3.1 改进型趋近律性能仿真
(1) 引入转速误差的效果仿真
为了验证改进型趋近律的有效性,在Matlab中根据式(3)、式(4)分别进行仿真,采用相同参数:c=15,ε=15,q=1,D=185。滑模运动相轨迹如图2所示,横、纵坐标分别代表状态变量x1、x2;图3为切换函数的变化曲线,其中图3(b)为局部放大图。
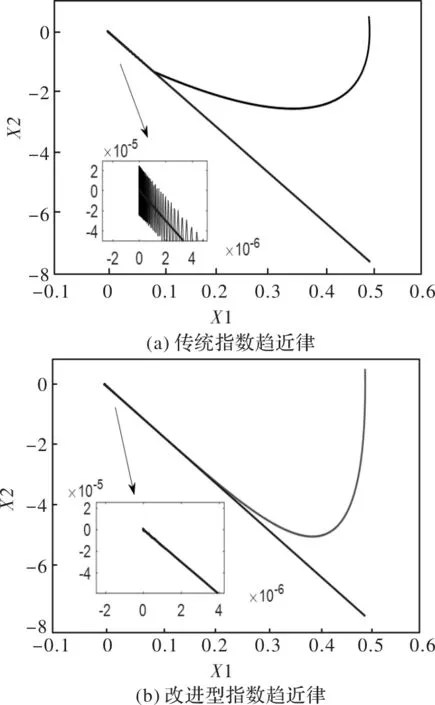
图2 两种趋近律相轨迹对比

图3 两种趋近律切换函数对比
从图2可以看出,对于改进型指数趋近律,状态变量在离滑模面较远时,趋近速率更快,而接近滑模面时,切入更平稳,并且最终能稳定在系统原点。从图3可以看出,运动点从初始值到达平衡点的过程中,改进型指数趋近律的收敛时间更短,系统的抖振现象也得到了明显改善。说明改进型趋近律改善了趋近运动的动态品质,提高了系统的动态响应速度与稳态精度。
(2) 平滑符号函数效果仿真
结合式(11)控制器输出表达式,分别采用两种符号函数进行仿真,控制器的输出曲线如图4所示。
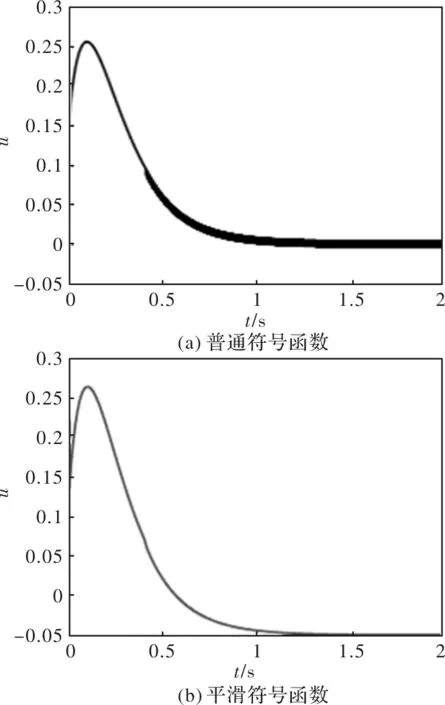
图4 控制器输出
从图4可以看出,平滑符号函数效果明显,使控制器的输出抖振大大下降,并且不会响应系统到达稳态的时间。
3.2 新型滑模控制器性能仿真
为了验证新方案对PMSM调速系统动态和稳态性能的提升效果,在Matlab的Simulink模块中搭建PMSM双闭环调速系统的仿真模型,控制系统结构框图如图5所示。其中,电流环采用PI控制,速度环采用滑模控制。电机参数及仿真条件设置如表1所示。

图5 PMSM调速系统结构框图

表1 电机参数表
(1) 引入转速误差的效果仿真
速度调节器分别使用传统指数趋近律和改进型指数趋近律,采用相同参数:c=35、ε=80、q=200。额定转速为1000 r/min,空载启动,在0.15s时,将电机的负载由0 Nm增加到10 Nm。采用两种趋近律的速度调节器转速响应对比如图5所示,图6为起动阶段局部放大图,图7为负载扰动阶段局部放大图,具体数据对比如表2所示。

图6 两种趋近律下转速响应对比图

图7 起动阶段局部放大图
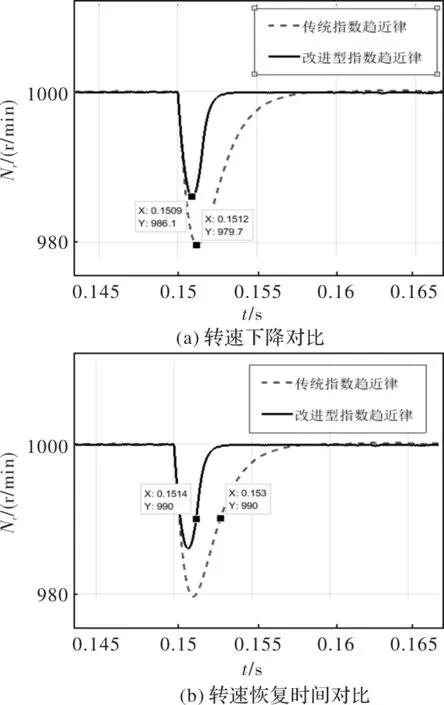
图8 负载扰动阶段局部放大图
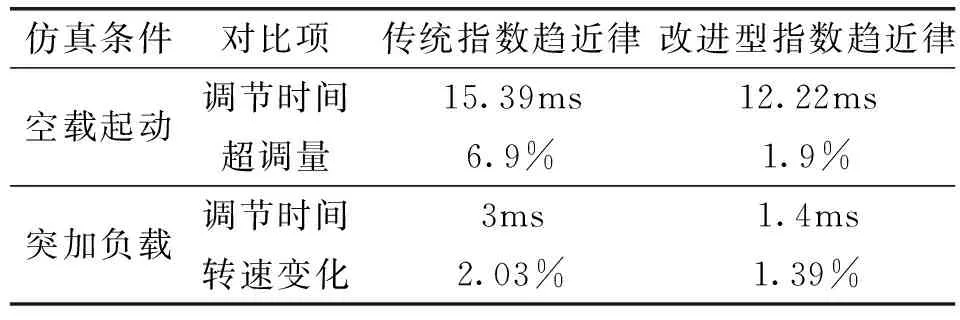
表2 数据对比(误差带1%)
从图7和表2可以看出,起动阶段,采用改进型指数趋近律的系统调节时间更短,能更快的到达稳定状态,超调量也减小为传统指数趋近律的27.5%,说
明改进型指数趋近律提高了PMSM调速系统的动态响应能力。
从图8和表2可以看出,在0.15 s突加负载后,采用改进型指数趋近律系统的电机转速仅下降了1.39%,并能在1.4 ms内恢复到稳态,说明改进型指数趋近律也提高了PMSM调速系统的抗干扰能力。
(2) 平滑符号函数效果仿真
为了验证平滑符号函数对PMSM调速系统性能的改进效果,速度调节器分别采用改进型指数趋近律+普通符号函数和改进型指数趋近律+平滑符号函数两种方案,系统的输出转矩对比如图9所示。
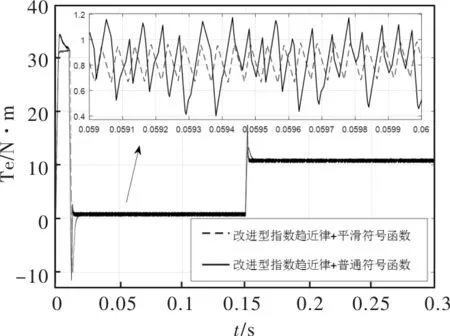
图9 输出转矩对比
从图9看出,平滑符号函数使PMSM调速系统的输出转矩抖动幅度明显减弱,约为采用普通符号函数时的50%,说明平滑符号函数有效提高了系统的稳态精度。
4 结 语
相比传统指数趋近律,本文提出的改进型指数趋近律具有相应速度快、超调量小、抖振小、抗干扰能力强的特点,改进的符号函数也进一步提高了滑模控制器的输出精度。仿真结果表明,将新算法应用于矢量控制的PMSM调速系统是可行、有效的,不仅能够较好地保证PMSM调速系统的动态性能,而且可以有效地改善系统的鲁棒性,削弱系统的抖振。