基于哈密顿系统理论的永磁同步电机无传感器控制
2019-03-26樊峰宇尚俊云米乾宝
樊峰宇,尚俊云,米乾宝
(西安航天精密机电研究所,西安710100)
0 引 言
永磁同步电机(PMSM)因能量转换效率高,体积小,运行可靠性高,调速范围广,动、静态特性好等优点[1],被广泛应用于自动化过程控制领域。在常用的永磁同步电机双闭环控制策略中,需要在电机轴端安装传感器来反馈转子的位置和转速信息,构成闭环控制系统。但传感器的性能受温度、湿度等环境因素影响较大,限制了永磁同步电机的使用范围[2],例如:航空发动机滑油泵用电机就期望采用无传感器的控制方法。
现阶段常用的永磁同步电机无传感器控制策略中电流环采用PI算法,观测器常使用滑模观测器,即基于PI和滑模观测器的无传感器控制。而泵类电机负载转矩波动较大,基于PI与观测器相结合的控制策略因响应时间较长、抗扰动能力弱、超调量大,不能很好的满足控制要求。为了提高控制系统的响应速度、抗扰动能力并减小超调量,本文从能量角度出发,建立了永磁同步电机的哈密顿系统模型,并通过互联和阻尼配置的无源控制方法设计了电机控制器,取代了传统控制策略中电流环的PI模块。
为验证基于哈密顿系统理论的永磁同步电机无传感器控制策略的优越性,在Simulink中分别建立了基于哈密顿系统理论和基于PI的永磁同步电机无传感器控制系统仿真模型,其中滑模观测器中的滑模控制函数采用Sigmoid(s)函数[3]。
1 基于哈密顿系统的无源控制方法
1.1 端口受控耗散哈密顿系统
端口受控耗散哈密顿系统的数学模型可用以下形式描述[4]:
(1)
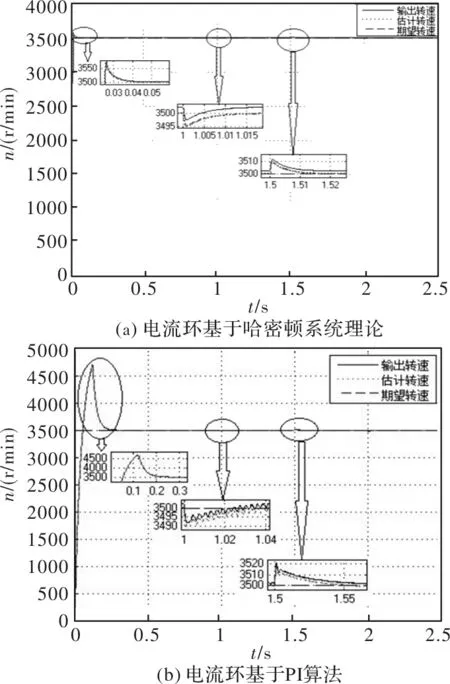
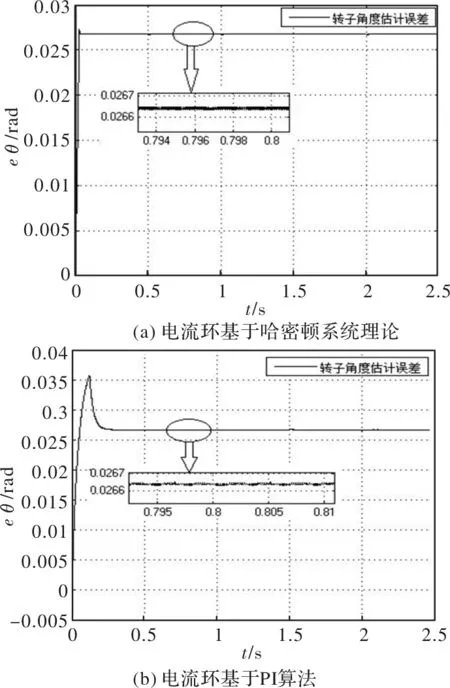
其中,x⊂Rn是状态变量;u⊂Rm,m 互联和阻尼配置的无源控制方法是对端口受控耗散哈密顿系统设计一个状态反馈控制律u=β(x),使闭环系统成为一个如下的期望端口受控耗散哈密顿系统 (2) 定理1[5]:对于如下的非线性系统 (3) (4) 式中,g⊥(x)满足等式g⊥(x)g(x)=0,Hd(x)在期望的平衡点x0处取得严格极小值。当满足以上条件时,系统(3)经控制律u=β(x)可转化为式(2)所描述的期望端口受控耗散哈密顿系统,且控制律u可按下式计算 (5) 且x0将成为闭环系统局部稳定平衡点。 永磁同步电机在同步旋转(d-q)坐标系下的数学模型如下[6]: (6) 式中,J为转动惯量,Ld、Lq为电机在d-q坐标系下的直轴和交轴电感,Rs为定子电阻,TL为负载转矩,ψf为永磁体产生的磁链,p为电机的极对数,ωe为转子电角速度,它与机械角速度ω的关系为ωe=pω。 取状态变量 (7) 系统的能量函数 (8) 则系统(6)的端口受控耗散哈密顿模型如下 (9) 取系统期望的能量函数为 (10) 选择期望的互联矩阵和阻尼矩阵为 式中,Jij和ri为待定的互联和阻尼系数,其中,ri>0。 把J(x)、R(x)、H(x)、Jd(x)、Rd(x)、Hd(x)、ξ代入式(4),并取g⊥(x)为 g⊥(x)=[0 0 1] 可得 (11) (12) (13) 式(13)即为基于哈密顿系统理论所设计的电机控制器的交直轴电压表达式,与传统PI算法相比较,新算法加入了电阻、电感等电机参数,使控制过程具有了明确的物理意义,并且运算过程没有积分环节,可减小超调量,提高响应速度。 根据以上推导,控制器模型框图1和系统整体仿真模型如下。 图1 控制器模型框图 图2 控制系统整体仿真模型 本文以表贴式永磁同步电机为研究对象,仿真中所用电机参数和PI参数如表1、表2所示。 表1 电机参数表 表2 PI参数设置 给定转速信号为3500 r/min,初始负载转矩为0 Nm,0.5 s时突变为1 Nm,1 s时突变为2 Nm,1.5 s时突变为0 Nm,2 s时突变为2 Nm。两种控制策略的仿真波形如下。 图3 负载转矩波形 图4 输出转速、估计转速和期望转速波形 图5 期望转速与输出转速之差 图6 实际转子角度与估计转子角度之差 图7 输出转矩波形 两种控制策略的仿真结果对比如下表3所示。 表3 两种控制策略的仿真结果对比 从仿真结果可知,在基于滑模观测器的永磁同步电机无传感器控制中,电流环采用电机控制器的控制策略优于电流环采用PI算法的控制策略,其中转速响应时间可提高6倍,超调量从34%减小到2.2%,稳态时的输出转矩波动从0.3 Nm减小为0.1 Nm,并且负载突变时转矩超调量也小于PI算法。 为改善永磁同步电机无传感器矢量控制的性能,本文首先建立了永磁同步电机的端口受控耗散哈密顿模型,然后运用互联和阻尼配置的无源控制方法设计了一种电机控制器,代替了传统控制方法中电流环的PI模块,使控制过程从能量变化角度出发,具有了明确的物理意义,并在Simulink中建立了仿真模型,与电流环采用传统PI算法的控制方法进行了对比分析,结果表明新型控制方法的响应速度更快、抗扰动能力更强且超调量更小。1.2 互联和阻尼配置的无源控制方法



2 基于哈密顿系统的永磁同步电机控制器设计
2.1 永磁同步电机的端口受控耗散哈密顿模型
2.2 控制器设计



3 控制系统仿真验证
3.1 仿真模型的建立


3.2 参数设置和仿真波形







4 总 结
