基于变阻尼调节器与负载观测器的永磁同步电机无源控制
2019-03-26朱文垚张海燕俞高伟
朱文垚,张海燕,俞高伟,柳 毅
(1.上海电机学院 电气学院,上海 201306;2.上海交通大学 电气学院,上海 200240;3.上海发电设备成套设计研究院有限责任公司,上海 200240)
0 引 言
永磁同步电机(PMSM)具有简单的结构、可靠的运行;损耗少、效率高;灵活多变的尺寸结构等显著优点,而广泛适应于各种场合,因而对其控制性能也提出了越来越高的要求[1]。但是当系统受到外部干扰和系统参数摄动影响时,常规的PI控制方法会使的系统控制能力变差。由于PMSM调速系统具有多变量、强耦合的非线性,许多先进的非线性控制理论(如滑模控制[2-4]、反馈线性化控制[5]、反步法[6-7]、自抗扰控制[8]、预测控制[9-11]等)已被广泛应用到PMSM调速系统当中。这一些非线性控制理论的应用,改善了PMSM的系统控制性能,已在交流调速方面取得了非常好的效果[12]。
PCHD模型按照互联配置和阻尼的注入,进行系统的能量成型设计,通过期望平衡点的计算设计出控制器使得新的能量函数稳定在期望值。文献[13]提出了基于位置控制的PCH系统控制原理,构建了基于能量观点所设计的PCH与自适应阻尼的协调控制器。通过分别对d,q轴电流以及转速加入自适应阻尼来实现系统快速跟踪给定,但是自适应阻尼的多重注入会导致系统计算控制难度增加。文献[14]设计的电机模型由五阶转为三阶,通过自适应的方法,分析了感应电机的无源性,省略了定子电阻值和磁链观测器,简化了系统的设计文献[15]采用恒定阻尼注入,分析了高速运行时需要较大的比例系数使系统振荡的问题,通过无功力和状态变量的不同选择,解决了应用于实际高速系统时由于时间离散性和系统带宽的限制问题,但是采用恒定阻尼注入将导致电流波形毛刺增多和容易使控制器输出饱和。文献[16]采用变阻尼的注入,利用二阶微分跟踪器实现,改善了控制系统在启动状态时的动态特性,但是会降低系统的稳态特性以及收敛能力。
为了改善永磁同步电机的控制性能,本文在传统阻尼配置基础上,提出了基于PCHD模型的PMSM变阻尼控制策略,并结合了负载观测器实现了对负载转矩的实时观测,从而提升了无源控制器的响应速度和控制精度。采用本文设计的变阻尼控制策略与传统的阻尼配置策略相比,永磁同步电机在启动阶段能更快地达到给定速度且超调小;而在突加负载时电机的转速波动更小且稳定在给定转速的时间明显缩短。由此说明本文设计变阻尼无源控制策略能有效的改善了系统在启动阶段和负载变化时的动态特性,而且仿真验证了变阻尼无源控制策略拥有更好的系统收敛能力。
1 PMSM的PCHD模型
在忽略D和K的情况下,PMSM在旋转dq坐标系的数学模型包括:电磁和机械系统这两部分,则PMSM数学模型表示为以下方程
(1)
式中,ψsr为磁链;Rs为电机定子电枢电阻;TL为负载转矩;isd、isq为dq坐标系下d轴和q轴的定子电流分量;Lsd、Lsq为dq坐标系下的d轴和q轴定子电感分量;ωr为转子机械旋转角速度;np为极对数;usd、usq分别为dq坐标下定子电压在d轴与q轴分量;ωr=npωm,ωm为电角速度。定义系统的状态、输入及输出变量为
(2)
将式(1)以状态变量的形式变换为
(3)
PMSM系统的Hamilton函数包含电能和机械能,则有
(4)
(5)
则PMSM的PCHD模型为
(6)
2 PMSM变阻尼无源控制策略
为将PMSM速度调节渐进至期望平衡点x0处,闭环系统期望的Hd在此平衡点具有最小值,即对于x0的邻域内x≠x0,有Hd(x)≠Hd(x0),寻求反馈函数u=δ(x)使得系统为
(7)

(8)
(9)
式中的K(x)为标量函数的梯度,满足
(10)
在期望的平衡点x0处,K(x)满足
(11)
式(11)是Hd(x)在x0处存在极值的条件。根据Lyapunov稳定性定理,即在x0处,K(x)的雅克比矩阵满足
(12)
式(12)是Hd(x)在x0处存在极小值的条件。在上述条件下,则系统具有能量耗散的PCHD形式,x0为闭环系统的一个稳定的平衡点。能量函数Hd(x)和Ha(x)分别为以下形式
(13)
并满足
(14)
其中,Ha(x)为注入到系统的待定能量函数。另外如果{x0}为包含于式(14)的闭环能量系统中具有最大不变集合,那么系统为渐进趋于稳定的。吸引域的最大有界集合估计由{x∈Rn|H(x)≤c}给出。
2.1 基于PCHD模型的变阻尼无源控制结构

图1 变阻尼无源系统结构控制图
2.2 变阻尼函数注入
对于变频调速系统,固定阻尼的注入参数的大小直接会影响到无源控制器对于跟踪给定值的输出性能,采用恒定阻尼配置,如若阻尼参数值设置过小,系统的反应速度过慢,转速输出控制稳定性差;若阻尼参数值设置过大,系统的反应速度过快,稳态误差变小,但是会增大电流波形的畸变率。因此需要寻求一种随着系统需求变化的函数来替代固定阻尼注入。
采用变阻尼函数的实现需要知道系统需求的变化趋势。当系统开始时,需要增大阻尼的注入减少系统的反应时间;当系统接近平衡点时,减小摄入的阻尼参数值,使的减小系统平衡点处速度的抖动。
PMSM无源控制系统对于变阻尼的函数的注入,采用快速正反切跟踪微分器(RATD)。快速正反切微分器动态函数描述为:z1(t)、z2(t)为系统的状态;a1、a2、b为设计参数。图2为快速正反切非线性函数。

图2 快速正反切非线性函数
快速正反切跟踪微分器方程为
(15)
系统期望在开始状态设置较大的阻尼参数值,而对于系统接近平衡点时通过设置较小的阻尼参数值使得稳态误差变小,而快速正反切跟踪微分器正好是起始状态为较大值,最后收敛至稳态值,因此将初始状态输出阻尼值限幅,稳态时设置为输出需要的阻尼参数值。则变阻尼注入由下面方程确定
其中,
(17)
式中,k1为启动时候的阻尼参数值,k2为接近稳态时的阻尼参数值,y为总体阻尼输出参数值。
2.3 负载转矩观测器的设计
由于永磁同步电机的负载转矩是非电物理量,不易直接测量,通过检测有关电信号对负载转矩进行实时的估算可以提高控制精度,显著提升系统抗干扰能力。
依据电机的机械运动方程式
(18)
在一个采样电流周期内,负载转矩的变化极小可认为恒值,则

(19)
构建系统的状态方程如下
(20)
定义输出量y为电机的转速,得到如下状态方程
(21)
根据现代控制理论,构建系统状态观测器为:
(22)
通过式(21)和式(22)可以得出观测器误差方程为
(23)
可得观测矩阵特征方程为
(24)
定义系统期望的极点λ1,λ2,观测器期望的特征多项式为
n2-(λ1+λ2)n+λ1λ2=0
(25)
对比式(26)和式(27)得
(26)
根据计算出的反馈增益k1,k2,基于式(20)可构建出系统的状态观测方程
(27)
据此可得负载转矩观测器如图3所示。

图3 负载转矩观测器
2.4 期望状态平衡点的确定
Te=np[ψsrisq+(Lsd-Lsq)isqisd]
(28)
可以简化为电磁转矩方程为
Te=npψsrisq
(29)

(30)
求得系统平衡点处的输入为
(31)
2.5 系统控制器的设计
设e=x-x*,取系统期望的哈密顿函数为
(32)

(33)
式(33)中,J12、J13、J23与r为待整定的互联矩阵和变阻尼函数。
则对于系统的耗散PCHD系统为以下形式
(34)
可以得到控制器的设计为
(35)
和式(31)所得参数代入式(35)的控制器为
(36)

2.6 系统稳定性分析
当系统稳定时x0恒定值时,下式成立:
(37)
3 控制系统的仿真结果与分析
为了检验本文设计的变阻尼无源性控制器和负载观测器的正确性,通过Matlab/Simulink进行系统仿真验证,PMSM参数如表1所示。

表1 PMSM参数
图4为恒定阻尼与变阻尼无源性控制PMSM的转速对比仿真波形曲线,通过设置系统转速为2000 r/min,可以看出,在启动阶段,对比传统的恒定阻尼控制方法,变阻尼控制器可以明显的减少超调量。在0.1 s时突加负载时,传统恒定阻尼系统的恢复时间较长,有很明显速度下降而变阻尼控制器下的转速下降小,并能很快的恢复到原有的转速。

图4 无源控制的速度对照波形
由图5可知变阻尼无源控制的转矩达到最大值的时间要明显小于恒定阻尼无源控制的时间。变阻尼无源控制达到稳态的时间要比恒定阻尼超前0.0175 s,并且变阻尼无源控制的超调量要明显小于恒定阻尼控制方法。系统在0.1 s的时候突加10 Nm的负载,由图可以看出变阻尼的控制方法的超调量要小于恒定阻尼的方法,由此可以证明变阻尼无源控制方法可以有效的减小系统在接受负载变化时的超调量,使得系统拥有更快的响应和收敛能力。
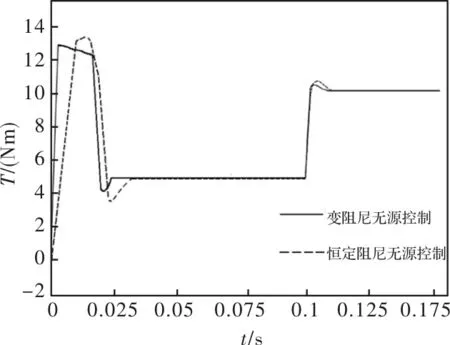
图5 无源控制的负载转矩对照波形
4 结 语
本文设计了一种基于PCHD模型的PMSM变阻尼以及负载观测器无源控制方法,深入分析了基于PCHD的PMSM的数学模型,速度控制以及负载转矩观测问题,构建了PMSM的PCHD数学模型。采用互联矩阵和阻尼矩阵函数配置的方法,使得PMSM控制系统实现了反馈镇定,设计了PMSM的负载转矩观测器和无源控制器,推出了旋转坐标系下定子电压控制方程,引用了快速正反切跟踪微分器作为了变阻尼的函数。这样可以使得阻尼随着期望跟踪变化。仿真表明,变阻尼无源控制比恒定阻尼的方法拥有更好的动态响应时间和收敛能力。