电机驱动电路高次谐波抑制研究
2019-03-26谭光道刘向辰
刘 琳,谭光道,刘向辰
(1.河南科技大学 应用工程学院, 河南 三门峡 472000;2.三门峡职业技术学院, 河南 三门峡 472000;3.华能国际电力股份有限公司贵州分公司,贵阳 550081;4.航空工业兰州万里航空机电有限责任公司,兰州 761286)
0 引 言
变频装置作为交流电机的驱动单元,因其节能效果良好等优点,得到越来越广泛地应用。但是因为变频装置主要由整流、逆变电路构成,此类电路拓扑含有大量非线性的开关半导体器件,引起输出电流含有大量高次谐波,对负载造成干扰[1-3]。
为了抑制变频驱动电机产生的谐波,文献[4-6]将二阶高通滤波器应用到变频驱动电路中,该方法虽然滤波特性较好,但其属于电路硬件设计,增加了系统体积和成本。文献[7-9]提出一种在传统PI控制中将预测控制算法引入电流内环的控制方法,该方法能够有效抑制逆变器产生的三次谐波,但由于实际控制模型参数不确定性,故在实际中应用较少。文献[10-12]提出一种比例复数积分来抑制谐波的方法,该方法是一种组合谐波抑制方法,能够有效减小稳态误差文献,但控制精度不高。
本文首先对变频驱动电机谐波产生机理进行分析,通过数学建模得到其低次谐波表达式,接着提出一种特定次谐波注入法来抑制相应次谐波,该方案基于电力电子技术与DSP芯片数字信号处理技术,产生一个与谐波分量幅值相等相位相反的波形。通过Matlab/Simulink和实验验证了该方法具有灵活性好、实用性强,对特定次谐波抑制能力较强的优点,可以应用在变频驱动电机谐波处理领域。
1 变频驱动电机数学模型
图1为变频驱动电机的等效电路图。变频驱动电路由整流、逆变电路组成,在整流电路中采用二极管整流元器件,在逆变电路采用IGBT逆变元器件;在整流、逆变电路连接处有电解电容,其作用为储能、平波;输出连接有用来滤波的电感;负载为交流电机。
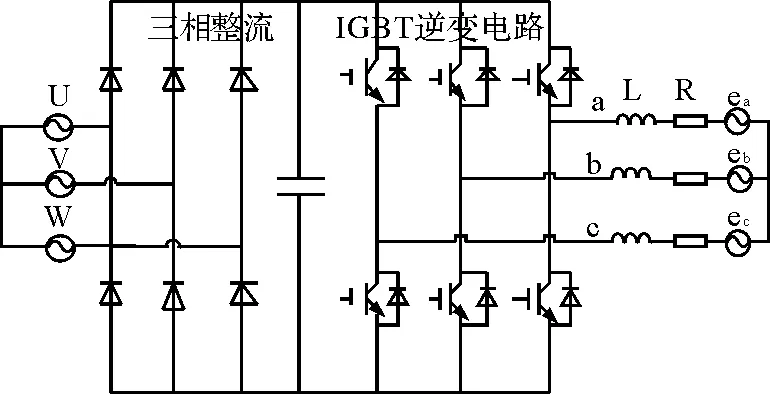
图1 变频驱动电机等效电路图
变频驱动电路输出为三相正弦交流电压:
u(t)=Usin(ωt+θ)
(1)
式中,U为输出电压幅值;ω为角频率;θ为初相角。交流电机输入电压又可表示为:
(2)
式中,L为变频驱动电路滤波电感;i为电机输入电流;R为电机三相绕组等效电阻;ψf为交流电机定子三相磁链。对式(2)进行 变换,可以得到 旋转坐标系下的数学模型如式(3)所示。
(3)
在电机稳态运行时,忽略式(3)中的交流分量,只保留直流分量,可以得到电机稳态电压方程为:
(4)
本文交流电机为表贴式直驱PMSM,采用id=0矢量控制,则电机转矩方程为:
(5)
式中,np为交流电机极对数。
2 变频驱动电机谐波抑制
2.1 变频驱动电路谐波分析
因为变频驱动电路中不管是二极管元器件还是IGBT元器件都是非线性开关半导体,导致输出三相正弦交流电发生畸变。对于周期为T=2π/ω的非正弦电压 ,式(1)可以进行傅里叶分解:
(6)
其中,
(7)
非正弦电压u(ωt)又可以表示为
(8)

变频驱动输出电流通常包含高次谐波,其中以5次、7次等低次谐波占主要成分。基波、5次、7次谐波在同步旋转坐标系下矢量关系如下图所示。
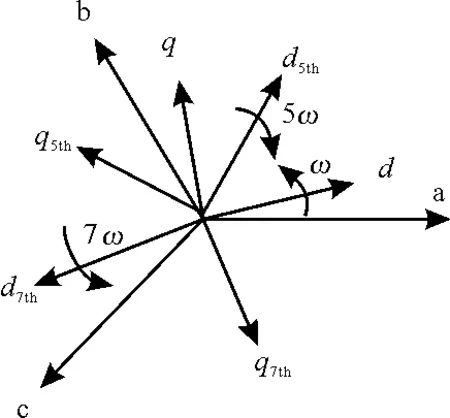
图2 旋转坐标系矢量关系
联立式(1)和式(8),根据图2可以得到含有基波、5次、7次谐波的输出三相电压表达式。
上式中,θ1、θ5、θ7为基波、5次谐波、7次谐波的初相角;u1、u5、u7为基波、5次谐波、7次谐波的电压幅值。谐波电流由谐波电压产生,变频驱动电机输出含有谐波的电流表达与式(9)类似,且各次谐波电流与谐波电压的旋转方向和角频率均相同。与基波稳态电压方程(4)类似,在dq5次旋转坐标系下,5次谐波稳态电压方程写为
(10)
式(10)中,ud5、uq5分别为5次谐波电压在d5轴、q5轴上的分量;id5、iq5分别为5次谐波电压在d5轴、q5轴上的分量。同理,7次谐波稳态电压为
(11)
式(11)中,ud7、uq7分别为7次谐波电压在d7轴、q7轴上的分量;id7、iq7分别为7次谐波电压 在d7轴、q7轴上的分量。
2.2 5次、7次谐波提取
在dq同步旋转坐标系下基波为直流分量,而5次谐波、7次谐波为交流分量;在dq5同步旋转坐标系下,5次谐波分量为直流分量,而基波、7次谐波均为交流分量;在dq7同步旋转坐标系下,7次谐波分量为直流分量,而基波、5次谐波均为交流分量。则可以利用低通滤波器滤波的方法来实现,得到dq5坐标系下的5次谐波电流的直轴分量id5和交轴分量iq5、dq7坐标系下的7次谐波电流的直轴分量id7和交轴分量iq7。变频驱动电机输出三相电流中的5次谐波和7次谐波电流提取模块如图3所示。
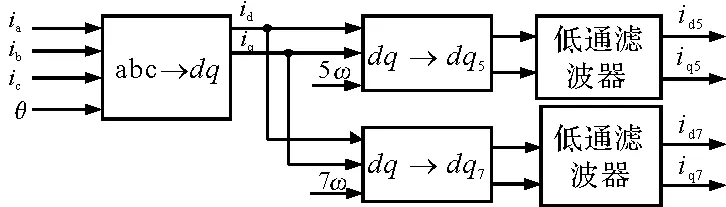
图3 5次、7次谐波电流提取模块
根据式(10)、(11)的5次、7次谐波稳态电压方程,为了提高变频驱动电机控制精度,设计带有交叉乘积项的PI前馈补偿调节器,准确计算出谐波电压,谐波电流交叉PI解耦控制原理如下图。
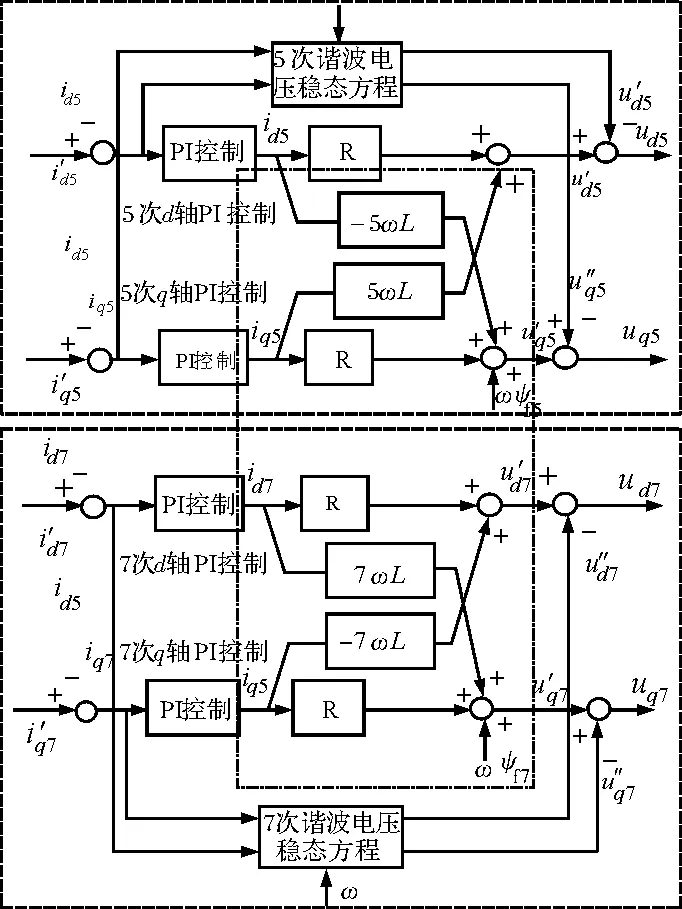
图4 谐波电流交叉PI解耦控制原理图
2.3 补偿谐波电压
(12)
(13)
3 Matlab/Simulink仿真分析
为了验证基于特定次谐波电流注入法的变频驱动电机可以对5次、7次等低次谐波进行有效抑制。在Matlab/Simulink下搭建控制系统的仿真模型,变频驱动电机主要参数如表1所示。
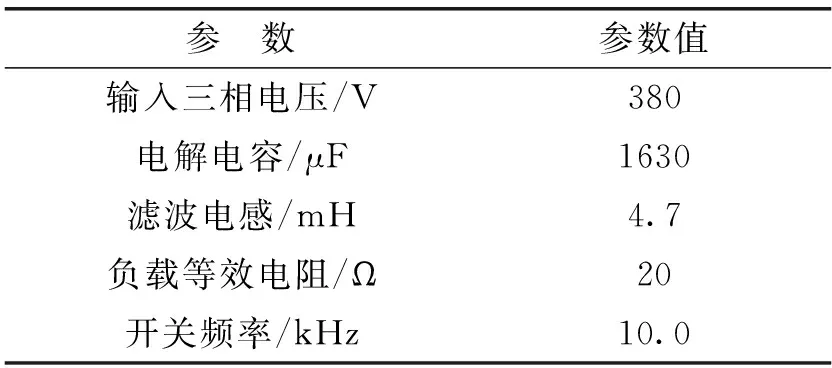
表1 变频驱动电机仿真参数
基于特定次谐波电流注入法的变频驱动电机控制系统结构如图5所示,采用双闭环PI控制策略。
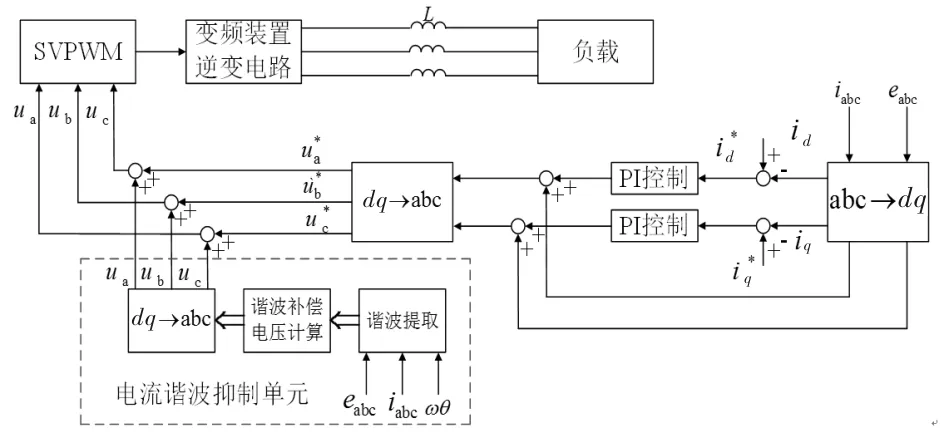
图5 基于特定次谐波电流注入法的变频驱动电机控制系统图
图6为未采用特定次谐波电流注入模块变频驱动电机三相电流波形及THD分析图。
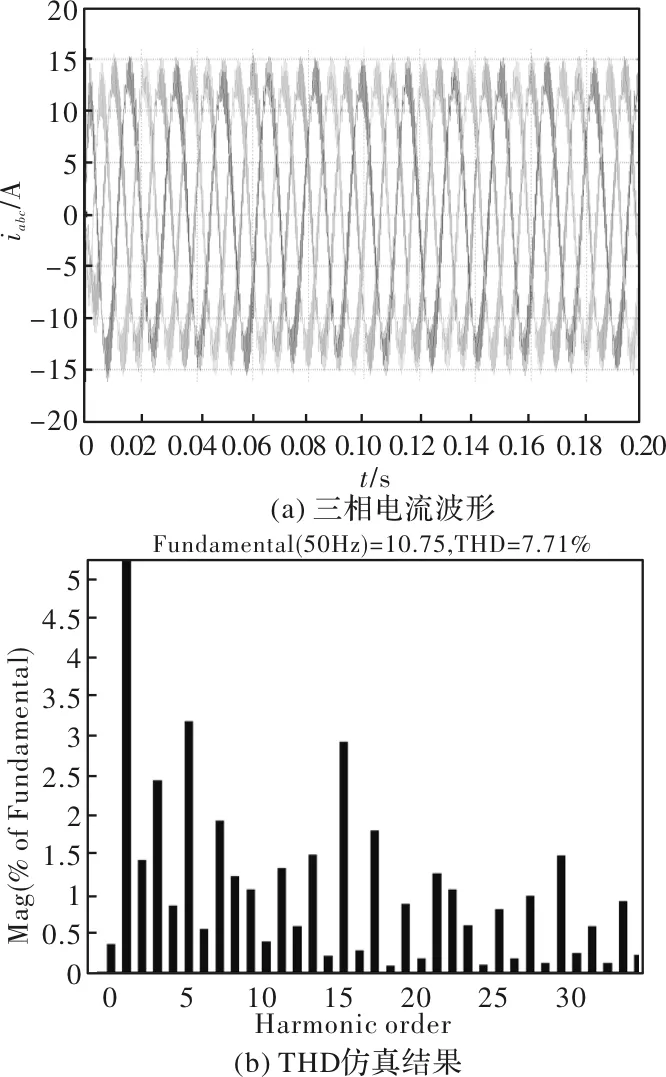
图6 未采用谐波注入法的变频驱动电机三相电流及THD仿真波形
由图6可知,未采用谐波注入法的变频驱动电机三相电流波形正弦稳定性较差,波形并不光滑含有大量毛刺,且在波峰和波谷处存在较大波动,总电流谐波畸变率THD为7.71%,谐波电流含量主要集中于5次、7次谐波,其含有率分别在33.91%和17.4%。图7为采用特定次谐波电流注入模块变频驱动电机三相电流波形及THD分析图。
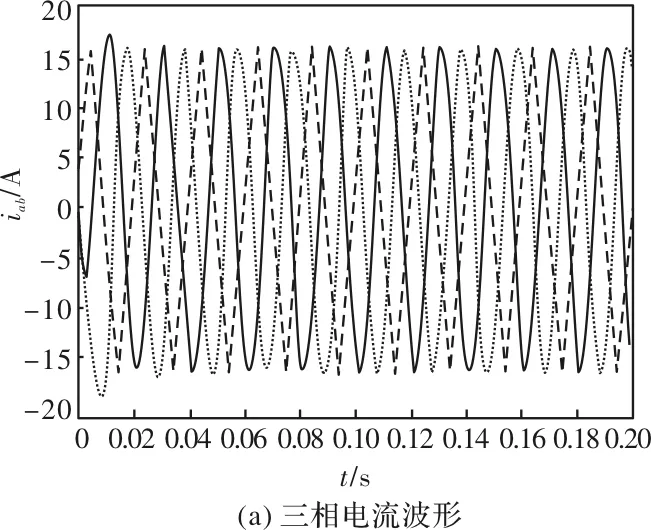
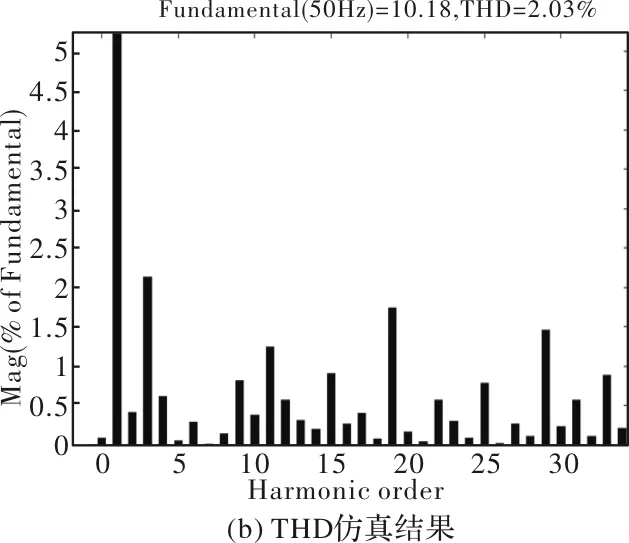
图7 采用谐波注入法的变频驱动电机三相电流及THD仿真波形
由图6及图7可知,采用5次、7次谐波注入法的变频驱动电机输出电流波形正弦稳定性较好,波形光滑且波峰和波谷处基本无波动,总电流谐波畸变率THD为2.03%,5次、7次谐波几乎为0,不会对电机稳定运行产生影响。
图8为未采用和采用特定次谐波电流注入法分别得到的电机转矩波形。
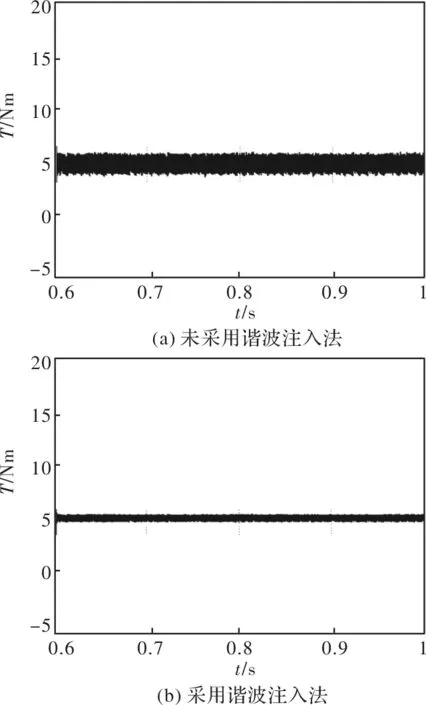
图8 电机转转矩对比波形
对比图8(a)、图8(b)可以看出,采用本文所提特定次谐波电流注入法分别得到的电机转矩波形更为平滑,有效减少了转矩脉动。
4 实验分析
为了进一步验证理论分析及仿真的正确性,本文以西门子公司生产某型号变频驱动电机为实验对象,搭建了基于TI公司DSP芯片TMS320F28335的变频驱动电机控制系统,通过Tektronix公司的MDO4104B-3示波器对实验波形进行观测、分析。
图9为未采用和采用谐波注入法的变频驱动电机A相电流及输出转矩实验波形。
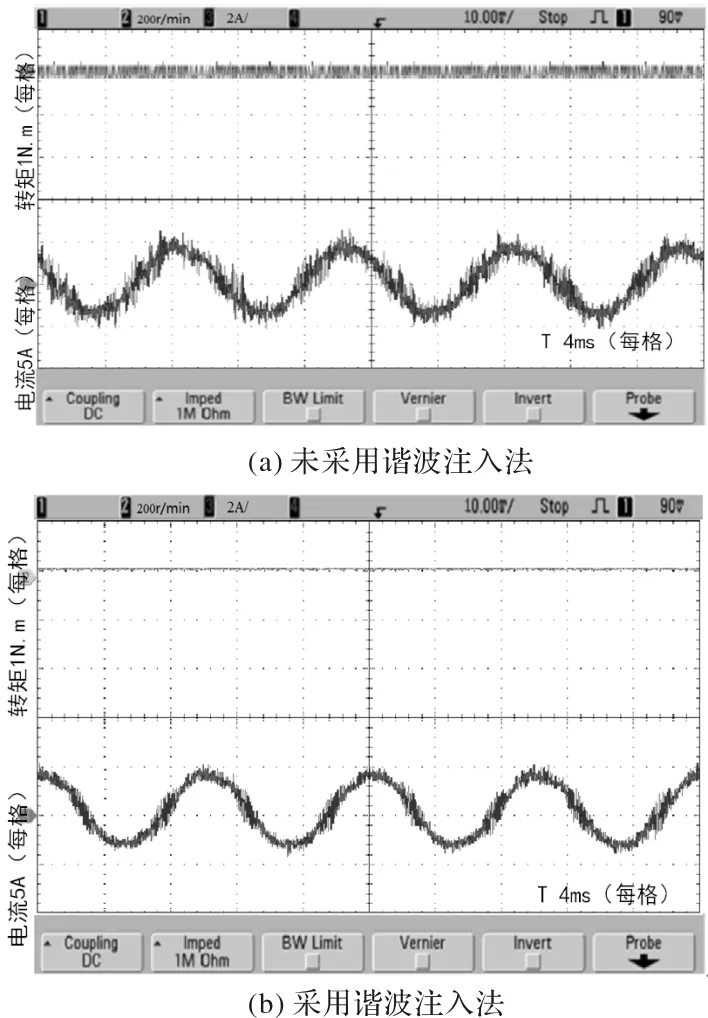
图9 变频驱动电机A相电流及输出转矩对比波形
对比图9(a)、图9(b)可以看出:未加入谐波电流注入得到变频驱动电机输出A相电流波形,存在较多毛刺,尤其是在峰-峰值处谐波畸变率高。而采用谐波电流注入模块得到的变频驱动电机输出A相电流波形光滑,正弦稳定性较好,尖峰毛刺较少,峰-峰值处的波形畸变率较小,电能质量高。对比转矩波形可以看出,采用本文所提方案得到的转矩波形更为平滑,转矩脉动得到了抑制,稳定性能好,增加了交流电机在伺服控制系统中精度。
5 结 语
本文对变频驱动电机谐波产生机理进行分析,通过对变频驱动电机数学建模,得到其低次谐波表达式,接着提出一种特定次谐波注入法来抑制相应次谐波,在变频驱动电机控制系统中,通过引入对特定次谐波电流的抑制模块,对影响输出电流较为严重的5次、7次等低次谐波进行有效抑制,减少了交流电机转矩脉动。
仿真和实验结果表明:本文所提方案可以对5次、7次等特定低次谐波进行消除,得到的三相电流,转矩波形更为光滑,所提方法具有有效性和较好的实用性,具有一定的理论参考和工程应用价值。
