基于霍尔传感器的PMSM低速区间相电流相位矫正
2022-01-15陈泽平史艳霞魏海峰苗奎星
陈泽平, 史艳霞, 魏海峰, 苗奎星
基于霍尔传感器的PMSM低速区间相电流相位矫正
陈泽平1, 史艳霞2, 魏海峰3, 苗奎星3
(1. 天津科技大学 电子信息与自动化学院, 天津, 300222; 2. 天津中德应用技术大学 智能制造学院, 天津, 300350; 3.江苏科技大学 电子信息学院, 江苏 镇江, 212000)
针对水下航行器推进系统中永磁同步电机(PMSM)三相电流由于系统内部软件延时导致重构后相电流发生滞后的问题, 分别对PMSM低速运行过程中三相电流合成矢量的角度与转子位置估算角度进行原理分析, 提出了一种将2种角度进行数据融合得到最优估计角度的方法, 从而矫正相电流相位。首先, 在电机低速运行过程中对三相电流进行卡尔曼滤波; 然后利用三相电流幅值计算合成矢量的角度; 再采用平均速度补偿的方法减小霍尔传感器本身存在的位置偏差; 接着采用转子位置估算的方法得到转子位置; 最后利用合成矢量角度和转子角度进行数据融合得到的最优角度对三相电流相位进行矫正, 重构三相定子电流值。试验结果显示, 基于霍尔传感器的PMSM相电流相位矫正方法能增强传统PMSM控制系统的抗干扰性, 使得重构后的三相电流值更加接近真实值。
水下航行器; 永磁同步电机; 三相电流; 转子; 相位矫正
0 引言
推进电机是水下航行器的重要组成部分, 由于水下航行器空间有限、运行情况复杂, 选用空间占用小、响应速度快、节能高效的推进电机对水下航行器具有重要意义[1]。在永磁同步电机(permanent magnet synchronous motor, PMSM)矢量控制系统中, 电流采集模块采集到的定子相电流是否准确, 直接影响系统性能的可靠性[2-6]。但由于PMSM具有调速范围大和运转速度快的特征, 且其本身不能取得理想的正弦气隙磁场, 这些都促使矢量控制系统中采样的相电流包含不规律的高次谐波以及环境干扰, 再加上矢量控制系统中软件延时的存在, 使得相电流重构后与真实值误差较大。因此, 如何提高相电流重构后的精确性对于PMSM矢量控制系统至关重要[4]。
为了对控制器中电流采集模块获得的相电流进行处理, 文献[7]~[9]使用卡尔曼滤波将转子角加速度以及电流采集值进行数据融合, 从而得到精确的三相电流, 这种方法能够对电机这种非平稳系统的随机过程进行估计, 针对电流采集模块的采集值在环境的随机干扰下进行最优估计, 最终得到平滑的三相电流曲线。文献[10]~[12]根据矢量合成的方法将三相电流合成一个随时间和空间变化的旋转磁场, 由于旋转磁场的空间磁链近乎圆形, 所以电机转矩输出更加稳定。在现实情况应用下, 存在PMSM本身工艺限制、安装霍尔传感器的手工偏差等不可避免的误差都会给霍尔传感器输出错误信号, 为了降低因手工安装霍尔传感器造成的误差, 文献[13]~[15]提出了一种平均速度补偿的方法对霍尔传感器存在的位置偏差进行补偿, 适用于电机转矩波动不大的场合。其还提出了一种基于霍尔传感器矢量相位跟踪的PMSM转子位置和速度估算方式, 通过这种方法可以得到电机转子的位置信息。由于三相电流合成的磁场矢量控制着转子运转, 而转子位置角度又是三相电流合成的磁场矢量的体现, 因此可以通过融合2种角度得到最优估计角度对重构后的相电流进行相位矫正。文献[16]提出了数据融合的方式, 根据实际需要采取恰当的样本量进行数据融合, 并随着系统运行不断更新样本量进行迭代计算, 这种算法软件成本较低, 且易于实现。
文中提出了一种基于霍尔传感器的PMSM低速区间相电流相位矫正的方法。首先, 为了获得足够精确的三相电流值, 对采集的三相电流进行卡尔曼滤波处理; 再通过分析三相电流以及三相电流合成矢量之间的关系, 得到合成矢量的角度; 然后, 通过平均速度补偿的方式对PMSM内部霍尔传感器本身存在的位置偏差进行补偿; 接着结合转子位置估算的原理得到转子位置的角度; 最后, 通过数据融合的方式, 将合成矢量的角度以及转子位置的角度进行数据融合并得到最优的估计角度, 利用最优估计角度以及合成矢量的膜值重构三相电流, 从而达到对相电流矫正的作用。在此算法的基础上, 以一台装有霍尔传感器的PMSM作为实验对象, 在电机运转的低速区间, 通过软件延时的方法模拟三相定子电流同时发生滞后的问题, 使用数模转换模块将合成矢量角度、转子位置角度以及矫正后的合成矢量角度输出并进行比较, 验证该方法的可行性和实用性。
1 三相电流采样和相位偏差分析
1.1 三相电流采样及矢量合成
PMSM矢量控制技术的一个关键环节是相电流的采集和重构, 相电流的采集方式包括电流互感器测量法、分流电阻法等。鉴于成本和易用性, 目前应用较多的相电流采集方式是电阻采样, 包括单电阻法、双电阻法以及三电阻法。文中相电流采集方法采用三电阻法, 如图1所示。

图1 三电阻采样框图
三相正弦电流合成将产生一个旋转磁场, 该磁场是随时间和空间变化的多变量系统

1.2 三相电流相位偏差

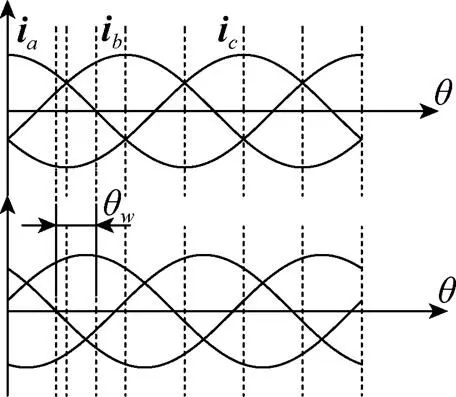
图2 三相电流发生滞后
2 三相电流滤波和矢量合成角度
2.1 三相电流滤波处理
PMSM在运转过程中, 通过电流采集模块直接采集到的三相电流原始值中包含纹波和噪声, 不能用来进行三相电流矢量合成分析, 为了提高控制器采集的电流值精度, 需要对电流原始值进行滤波处理, 卡尔曼滤波是最好的方法。

根据式(2)和式(3)可得卡尔曼滤波状态方程

设单相电流卡尔曼滤波的测量方程为

可得卡尔曼滤波模型为
到此基于相电流卡尔曼滤波模型已经建立, 根据模型的基本方程在控制器中设计滤波算法, 可以得到平滑的相电流曲线。
2.2 三相电流矢量合成角度


图3 三相电流波形
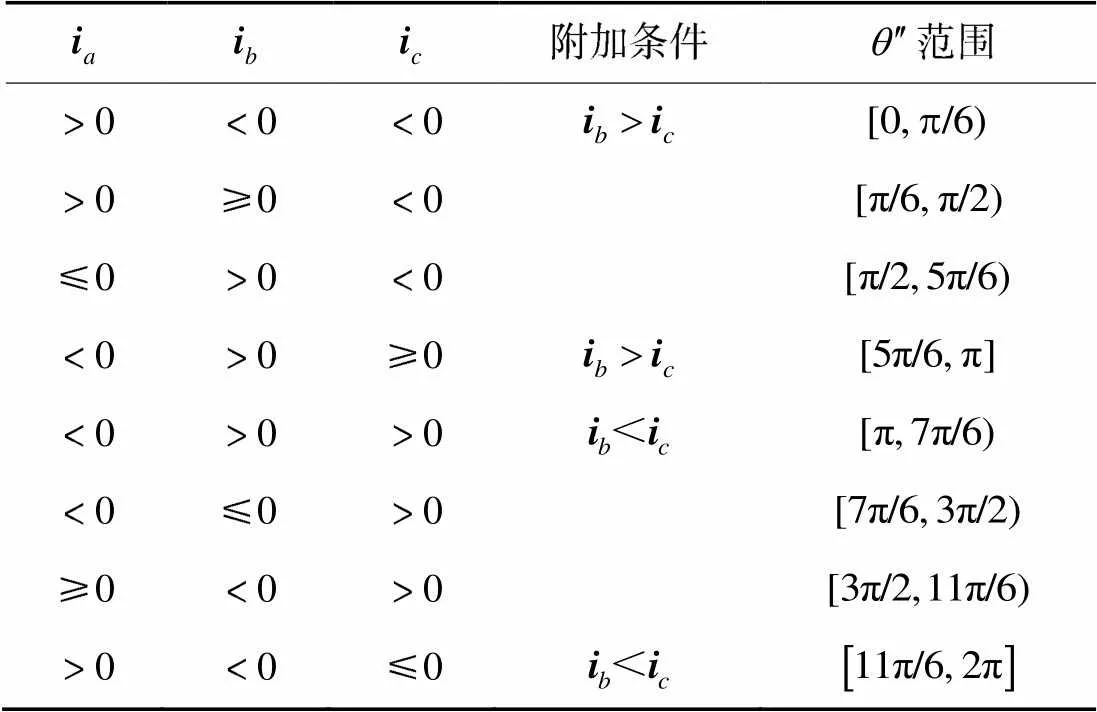
表1 角度对应关系


然后根据三角形三边、、求得与之间的夹角为
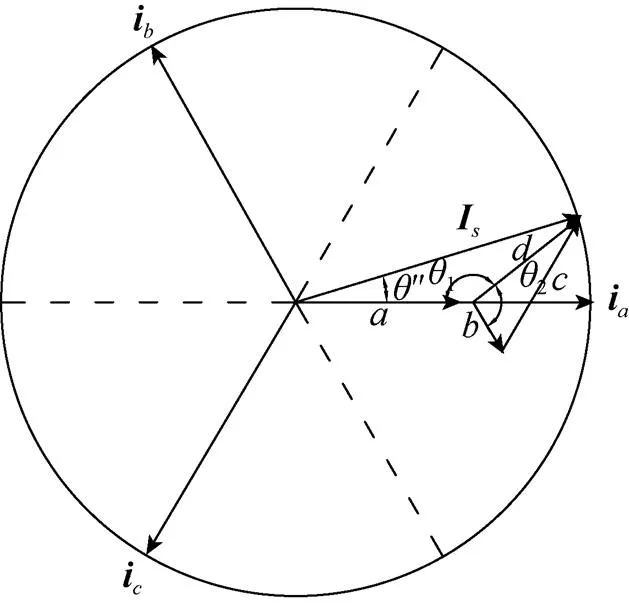
图4 合成矢量图形(情况1)
与之间的夹角为





然后根据三角形三边、求得
与之间的夹角为




3 转子位置分析与相电流相位矫正
3.1 霍尔传感器安装位置偏差补偿
由于PMSM本身工艺限制以及安装霍尔传感器存在手工偏差等因素, 造成霍尔传感器输出的转子位置信息与电机转子的真实位置信息之间产生误差, 如图6所示, 其中H、H、H和分别表示霍尔A、B、C相电平以及电机反电势,E、E和E分别表示电机三相反电势, I~VI分别表示霍尔传感器的6个状态。当霍尔传感器安装位置滞后时, 会使其检测到磁场过零延迟一段时间, 使得相邻2个霍尔扇区中前一个扇区对应的电角度较宽, 后一个扇区对应的电角度较窄。因为每个霍尔扇区的电角度不再是60°, 而系统却将其认为是实际的转子位置, 这会导致电机运转中产生电流畸变和转矩脉动, 影响电机的使用寿命和精度。因为PMSM是在低速区间运转且电机转速不会发生较大的脉动, 所以采用平均速度补偿可以有效消除霍尔传感器在PMSM的安装偏差。

图6 PMSM霍尔传感器位置安装误差图

由图7可得电机角速度的计算公式

3.2 转子位置估算原理
由于霍尔传感器只能得到转子的6个区间, 不符合PMSM矢量控制高分辨率位置信号的要求, 因此需要进行霍尔传感器区间位置的估算。
常见的开关型霍尔传感器呈120°电角度摆放, 电机的三相对应3个霍尔传感器, 每个霍尔传感器一般超前该相90°放置。当磁场的南北磁极通过时, 霍尔传感器会呈现高低电平变化。因此每个电周期内霍尔传感器都有2个输出状态。
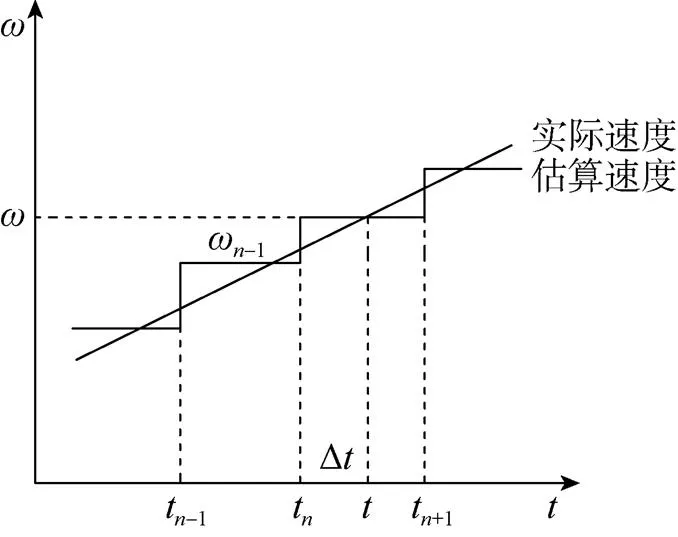
图7 平均速度补偿算法

进行程序设计时, 插值的细分时间往往是一个矢量控制周期, 在每个矢量控制执行周期进行一次位置估算, 并且在每个60°扇区位置进行一次校正。这种方法计算的是霍尔传感器旋转60°扇区的平均速度, 并不是瞬时速度。对于电机运转低速区间, 该算法完全可以拟合出一条很平滑的电角度曲线。
3.3 相电流相位矫正







4 实验分析
在交流调速平台上以一台装有霍尔传感器的PMSM作为实验对象, 对PMSM低速区间相电流相位矫正算法进行了实验验证。PMSM系统参数如表2所示, 搭建的系统实验平台如图9所示。

表2 电机参数
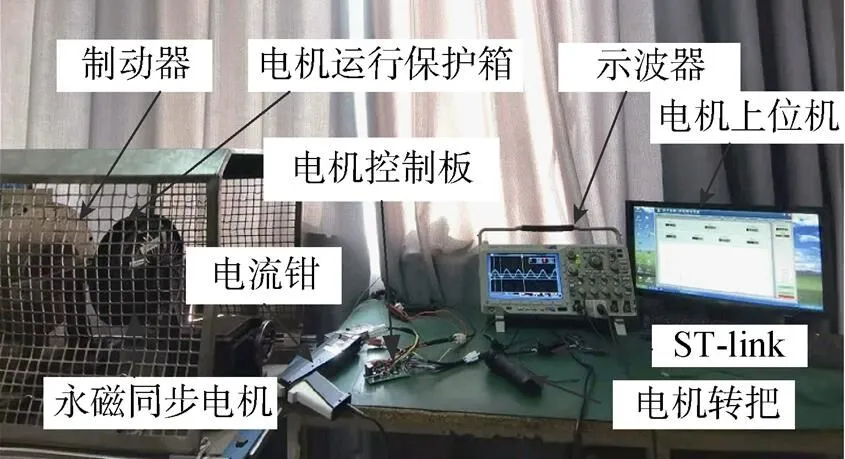
图9 系统实验平台
首先通过卡尔曼滤波实验对控制器采集的三相电流原始值进行滤波, 如图10所示, 图中为电流值。实验结果表明经过卡尔曼滤波的三相电流波动不大, 曲线更加平滑, 并且具有很强的抗外界干扰性。
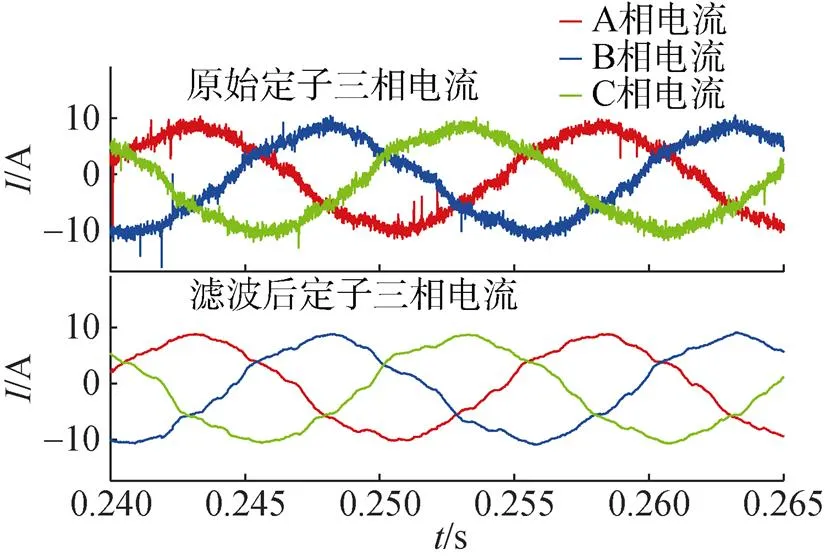
图10 三相电流卡尔曼滤波处理图
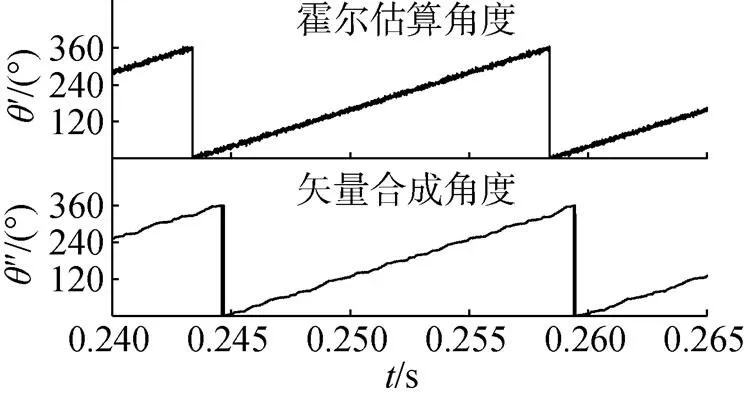
图11 转子角度与合成矢量角度对比图

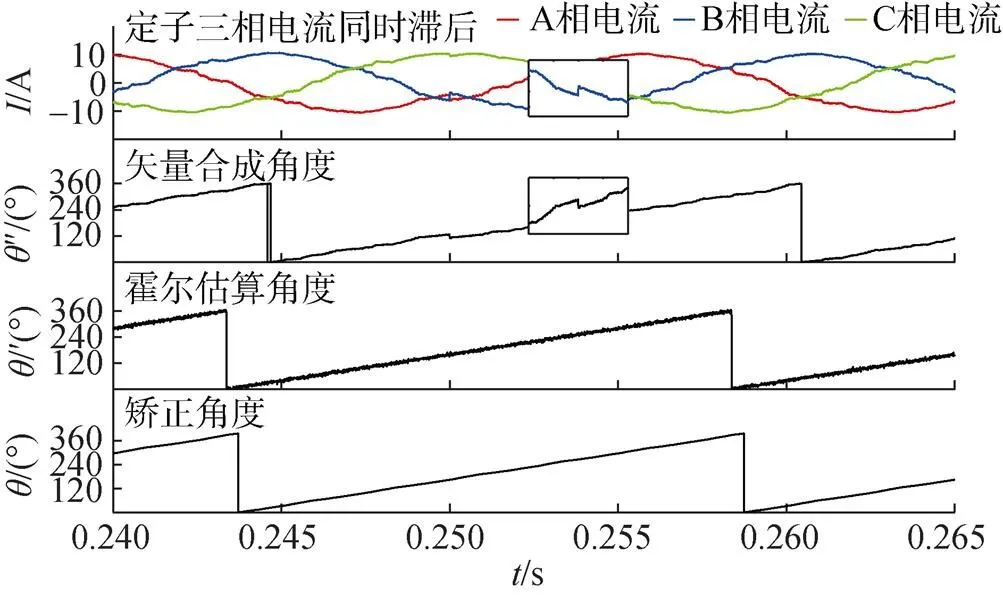
图12 相电流合成矢量矫正图
5 结束语
文中研究了PMSM三相定子电流由于MCU内部软件延时导致重构后三相定子电流发生滞后的问题, 通过将三相电流合成矢量角度和转子霍尔位置估算角度进行数据融合, 得到最优估计角度, 解决了三相定子电流重构后的滞后问题。最后, 在一台装有霍尔传感器的PMSM上进行实验, 在电机运转低速区间, 模拟三相定子电流同时发生滞后现象, 通过2种角度的数据融合方式矫正相电流相位。实验结果表明, 文中提出基于霍尔传感器的PMSM低速区间相电流相位矫正方法能有效解决电机运行时由于电流重构发生的滞后问题。文中对PMSM低速运转区间相电流相位矫正进行了初步研究, 今后还需进一步研究PMSM中高速运转区间相电流出现的滞后问题。
[1] 唐任远. 现代永磁电机理论与设计[M]. 北京: 机械工业出版社, 2015.
[2] 袁雷. 现代永磁同步电机控制原理及MATLAB仿真[M]. 北京: 北京航空航天大学出版社, 2016.
[3] 陆佳琪, 吴金富, 陆彦如, 等. 永磁同步电机新型单电阻电流重构技术研究[J]. 电机与控制应用, 2019, 46(2): 46- 51.
Lu Jia-qi, Wu Jin-fu, Lu Yan-ru, et al. A Novel Single-Resistance Current Reconfiguration Technique for Permanent Magnet Synchronous Motor[J]. Electric Machines and Control, 2019, 46 (2): 46-51.
[4] 邓娜. 基于改进相电流重构的电流采样校正方法[J]. 电气传动, 2020, 50(8): 15-20.
Deng Na. Current Sampling Correction Method Based on Improved Phase Current Reconstruction[J]. Electric Drive, 2020, 50(8): 15-20.
[5] 李白雅, 李述幸, 杨城健, 等. 永磁同步电机相电流重构方法研究[J]. 防爆电机, 2019, 54(5): 4-6.
Li Bai-ya, Li Shu-xing, Yang Cheng-jian, et al. Research on Rconstruction Method of PMSM Phase Current[J]. Explosion-Proof Electric Machine, 2019, 54(5): 4-6.
[6] 刘彦呈, 刘伟民, 郭昊昊. 基于田口法的永磁同步推进电机优化设计[J]. 微特电机, 2018, 46(3): 18-20.
Liu Yan-cheng, Liu Wei-min, Guo Hao-hao. Optimization Design of Permanent Magnet Synchronous Propulsion Motor Based on Taguchi Method[J]. Micro Motor, 2018, 46(3): 18-20.
[7] 李宏, 张鹏举. 双三相电机感应电机矢量控制研究[J]. 鱼雷技术, 2016, 24(5): 351-356.
Li Hong, Zhang Peng-ju. Vector Control of Dual Three- Phase Induction Motor[J]. Torpedo Technology, 2016, 24 (5): 351-356.
[8] Ostovic V.Memory Motors[J]. IEEE Industry Transactions on Industry Applications, 2003, 9(1): 52-61.
[9] 赵武玲, 魏振, 姚广. 永磁同步电动机全阶状态观测器的设计及分析[J]. 微特电机, 2019, 47(1): 20-24.
Zhao Wu-ling, Wei Zhen, Yao Guang. Design and Analysis of Full-Order State Observer on Permanent Magnet Synchronous Motor[J]. Micro Motor, 2019, 47(1): 20-24.
[10] Yoo A, Sul S K, Kim H, et al. Flux-weakening Strategy of an Induction Machine Driven by an Induction Machine Driven by an Electrolytic Capacitorless Inverter[J]. IEEE Transactions on Industry Applications, 2011, 47(3): 1328- 1336.
[11] Jahns T M, Kliman G B, Neumann T W. Interior Permanentmagnet Synchronous Motors for Adjustable-speed Drives[J]. IEEE Transactions on Industry Applications, 1986, 22(4): 738-747.
[12] 朱孟美, 张云, 解兆延, 等. 基于霍尔传感器的电动汽车用永磁同步电机的控制[J]. 电机与控制应用, 2016, 43(11): 23-27.
Zhu Meng-mei, Zhang Yun, Xie Zhao-yan, et al. Control of Permanent Magnet Synchronous Motor for Electric Vehicle Based on Hall Position Sensor[J]. Electric Machines & Control Applications, 2016, 43(11): 23-27.
[13] 聂铜, 张幽彤. 永磁同步电机霍尔传感器自标定算法研究[J]. 电机与控制应用, 2018, 45(4): 73-79.
Nie Tong, Zhang You-tong. Research on Self-calibration Algorithm of Permanent Magnet Synchronous Motor Hall Position Sensor[J]. Lectric Machines & Control App- lications, 2018, 45(4): 73-79.
[14] 董亮辉, 刘景林. 永磁同步电机位置传感器的故障检测和容错控制[J]. 西北工业大学学报, 2016, 34(2): 306-312.
Dong Liang-hui, Liu Jing-lin. Fault Detection and Fault- tolerant Control of Permanent Magnet Synchronous Motor Position Sensor[J]. Journal of Northwest Polytechnical University, 2016, 34(2): 306-312.
[15] 王高林, 陈伟, 杨荣峰. 无速度传感器感应电机改进转子磁链观测器[J]. 电机与控制学报, 2009, 13(5): 638- 642.
Wang Gao-lin, Chen Wei, Yang Rong-feng. Improved Rotor Flux Estimator for Sensor Less Induction Motor[J]. Lectric Machines and Control, 2009, 13(5): 638-642.
[16] 刘计龙, 肖飞, 沈洋, 等. 永磁同步电机无位置传感器控制技术研究综述[J]. 电工技术学报, 2017, 32(16): 76-88.
Liu Ji-long, Xiao Fei, Shen Yang, et al. Review of Non- position Sensor Control Technology for Permanent Magnet Synchronous Motor[J]. Transactions of China Electrotechnical Society, 2017, 32(16): 76-88.
Phase Current Phase Correction of PMSM in Low Speed Section Based on Hall Sensor
CHEN Ze-ping,SHI Yan-xia, WEI Hai-feng,MIAO Kui-xing
(1. School of Electronic Information and Automation, Tianjin University of Science and Technology, Tianjin 300222, China; 2. Intelligent Manufacturing College, Tianjin Sino-German University of Applied Sciences, Tianjin 300350, China; 3. School of Electronics and Information, Jiangsu University of Science and Technology, Zhenjiang 212000, China)
The three-phase current of a permanent magnet synchronous motor(PMSM) in an undersea vehicle propulsion system lags after reconfiguration due to the software delay within the system. To address this issue, the angles of the three-phase current synthesis vector and the rotor position estimation angle during the low-speed operation of the PMSM are analyzed in principle, and a method is proposed to fuse the data of the two angles to obtain the optimal estimated angle to correct the phase current phase. First, the Kalman filtering of the three-phase current is performed during the low-speed operation of the motor; subsequently, the angle of the synthesized vector is calculated using the three-phase current amplitude, and the position bias of the Hall sensor itself is reduced by using the average speed compensation method; next, the rotor position is estimated using the rotor position estimation method; finally, the optimal angle is obtained by fusing the synthetic vector angle and the rotor angle and correcting the three-phase current phase to reconstruct the three-phase stator current value. The experimental results show that the phase correction method based on the Hall sensor can enhance the interference resistance of the conventional PMSM control system, reducing the difference between the reconstructed three-phase current values and the real values.
undersea vehicle; permanent magnet synchronous motor (PMSM); three-phase current; rotor; phase correction
TJ630.32; TM351
A
2096-3920(2021)06-0739-08
10.11993/j.issn.2096-3920.2021.06.014
陈泽平, 史艳霞, 魏海峰, 等. 基于霍尔传感器的PMSM低速区间相电流相位矫正[J]. 水下无人系统学报, 2021, 29(6): 739-746.a
2021-01-24;
2021-03-27.
国家自然科学基金(51977101); 天津市技术创新引导专项优秀特派员项目(19JCTPJC41300).
陈泽平(1996-), 男, 在读硕士, 主要研究方向为电机控制.
(责任编辑: 许 妍)