基于元胞自动机的城市道路冲突车流建模
2019-03-07吴玉丽陈群
吴玉丽,陈群
基于元胞自动机的城市道路冲突车流建模
吴玉丽,陈群
(中南大学 交通运输工程学院,湖南 长沙 410075)
为研究无信号控制条件下2条单车道的车辆汇入同一车道时形成的冲突车流特征,通过分析车辆通过冲突点的运动规则,建立城市道路冲突车流的元胞自动机模型。模拟分析在道路处于不同进车概率下车辆的时空运行状态及道路的进车概率对交通流量和车辆平均速度的影响,研究结果表明:其中一条道路的进车概率小于临界值(0.2)时,该道路的交通流量和车辆平均速度不受另一条道路进车概率的影响;其中一条道路的进车概率大于临界值(0.2)时,另一条道路进车概率大于0.01时,该道路的交通流量和车辆平均速度随另一条道路进车概率的增大而减小,直到另一条道路进车概率达到临界值(0.2)。
交通工程;冲突车流;元胞自动机;城市道路;无信号控制
城市内的道路纵横交错,为了避免交通事故发生,车辆必须先后通过冲突点,即不同方向的车流存在冲突。而车流冲突是导致城市道路通行能力下降、堵塞以及道路交通安全事故的重要原因,也形成了道路通行中的瓶颈。因此,有必要对城市道路冲突车流的交通流特征进行分析。元胞自动机模型因其离散性、易在计算机上实现的特点,近年来被广泛应用于交通流领域。Nagel等[1]基于对车辆运动的观察,建立了最基础的单车道CA模型,随后许多研究者根据研究的实际需要,建立了考虑车辆动态间距的车辆运动模型以及混合交通流模型 等[2−6],由于无信号控制的车流冲突现象在城市道路中十分常见,因此吸引了很多学者的关注,针对无信号控制的十字及T字交叉口,相关的模型也较多[7−15]。李启郎等[9−12]在此基础上采用车辆同步更新规则,进一步研究了不同最大车速情况下、低速情况下2条单车道构成的十字路口的交通流相图;SUN等[13]对车辆多种合流行为下快速路匝道交通流特征进行了分析;FANG等[14]在考虑驾驶员行为影响的情况下,提出了无信号控制交叉口的元胞自动机模型,并对交通流特征进行了研究;Pawar 等[15]基于实验数据对无信号交叉口主路、支路驾驶者的驾驶行为进行了研究分析。以上研究成果对无信号控制的交叉口车辆运动规则、交通流特征及相图进行了研究,而对于由2条单车道汇入同一条车道的冲突车流现象的研究较少。基于此,本文对无信号控制的城市内相同等级的2条道路车辆汇入同一车道形成的冲突车流现象进行研究。为简化选取了无信号控制的城市内相同等级的2条单车道车辆汇入同一车道形成的冲突车流,基于元胞自动机建立城市道路冲突车流模型。
1 模型
建立无信号控制的城市道路冲突车流模型。图1是无信号控制的城市道路车流冲突系统的示意图。无信号控制的城市道路车流冲突系统内有A、B 2条单车道的道路,在图中的处2条道路上车辆汇入同一条道路C中。
1.1 车辆运动规则
元胞自动机模型被广泛应用于交通流分析中,根据特定研究对象需要制定合适的元胞自动机模型规则。因为Nasch模型规则较简单,能较好地模拟出单车道车流运动的特征,目前许多研究交通流特征的元胞自动机模型都是基于Nasch模型进行改进。由于本文着重研究车辆在冲突点位置的运动特征以及冲突车流的特征,所以本文以Nasch模型中的运动规则作为车辆基本的运动规则。
在Nasch模型中,道路被划分为若干个元胞,时间通过时间步的形式来体现。在本文冲突车流系统中,A,B和C段道路均被划分成个元胞,A和B段道路在元胞处交汇。每个元胞有车辆占据、空闲2种状态,1个时间步内元胞空间只能被1辆车占据。系统中的1辆车占据个元胞,每辆车在每个时间步具有相应的速度()=0,1,2,…,max,max表示车辆的最大速度,所有车辆都遵循以下规则进行平行更新。1) 加速:(+1)=max(()+1,max);2)减速:(+1)=min(()+1,),表示该车与前车的间距;3)以概率slow随机慢化:(+1)= max(()−1,0);4) 位置更新:(+1)=(t)+(+1),表示车辆的位置。
1.2 车辆在冲突点附近运动规则
如图1所示,2条道路等级相同,任一道路上的车辆皆不存在优先通过冲突点的权利。为了避免交通安全事故,车辆驾驶人员会遵循先到先通过的原则,即能够先到达冲突点的车辆优先通过冲突点,另一条道路上的车辆则需要在冲突点前停车等待。因此需要对2条道路上首车到达冲突点的时间进行比较。
为了定量地比较2条道路上的车辆到达冲突点的时间,将A和B段道路首车占据的最前面的元胞位置记为a和b,C段道路尾车占据的最前端的元胞位置记为c,冲突点的元胞位置记为o,A和B段道路首车的速度分别记为a和b,A和B段道路首车至C段道路尾车的距离分别记为a和b,A和B段道路的首车到达冲突点所需时间分别记为a,b,a和b,可用A和B段道路的首车当前至冲突点的距离除以A和B段道路的首车下一时间步的速度计算得到。
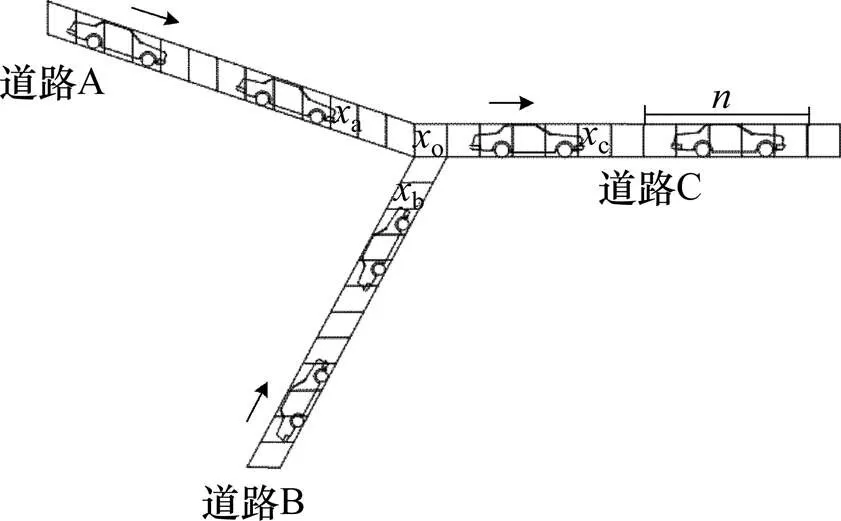
图1 城市道路冲突车流示意图



1.3 边界条件

2 仿真及结果分析
在本文的仿真中,A,B和C段道路长度=1 000个元胞,每辆车占据的元胞个数=5,每个元胞代表的长度是1.5 m,每辆车的长度相当于7.5 m,车辆的最大速度max=10 cell/s,车辆随机慢化概率slow=0.25。为了避免车辆初始化对仿真结果的影响,一共进行1 600次仿真,前600次仿真的结果不予采用。
为了研究A和B段道路车辆在不同进车概率情况下的运动情况,绘制了A和B段道路上801~1 000时间步内的车辆时空特性图。同时为了定量地分析A和B段道路的进车概率对道路车辆运行情况的影响,并且要消除初始化对结果的影响,在仿真中计算了601~1 600时间步即1 000个时间步内A和B段道路上通过冲突点断面的车辆数,记为A和B段道路的交通流量,同时还分别对A和B段道路上所有车辆的速度进行1 000次平均取值,记为A和B段道路车辆平均速度。为了消除随机性的影响,在进行10次仿真后取其平均值作为仿真结果,对A段道路交通流量、车辆平均速度与B段道路进车概率之间的关系进行分析。
2.1 道路车辆时空特性
A和B段道路上801~1 000时间步内的车辆时空特性如图2~3所示,时空特性图原点为道路的第600个元胞。A段道路进车概率1=0.5,B段道路进车概率2=0.9,A和B段道路时空特性图皆存在车辆集簇现象,此时A和B段道路存在堵塞现象。A段道路进车概率1=0.5,B段道路进车概率2=0.05,A段道路时空特性图中仍存在车辆集簇现象,B段道路时空特性图的边界存在少许车辆集簇现象。由此说明固定其中一条道路的进车概率,改变另外一条道路的进车概率,A和B段道路车辆运行状态会随着发生改变,A和B段道路车辆在通过冲突点时会相互影响。
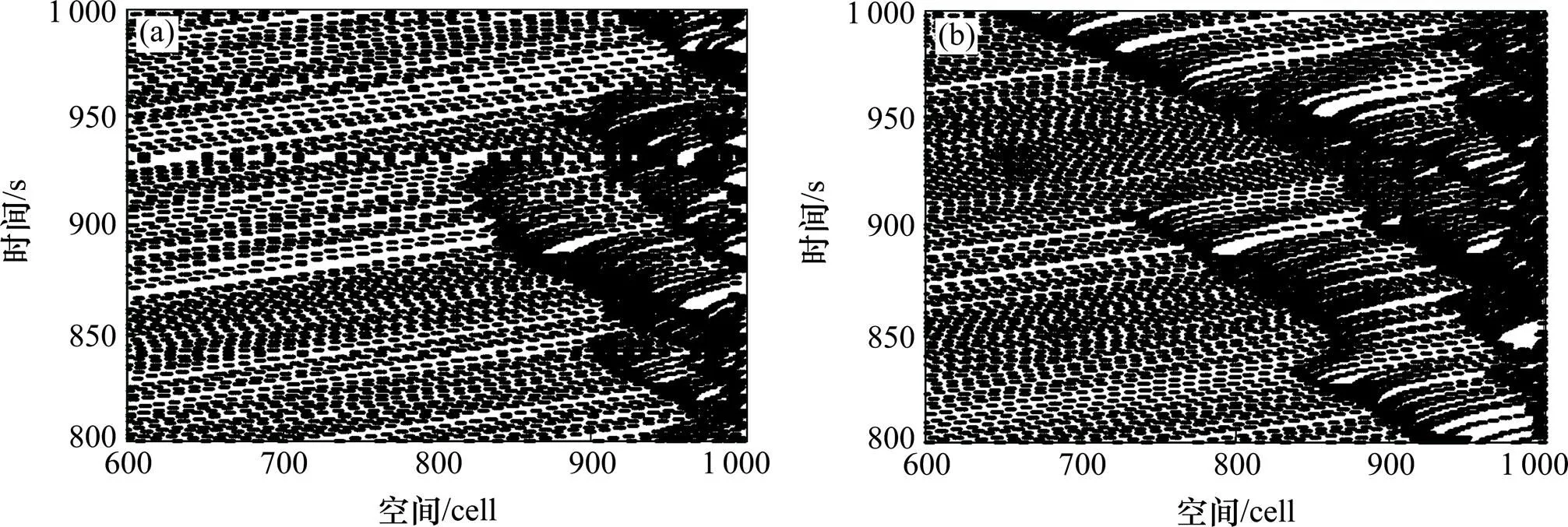
(a) A段道路;(b) B段道路
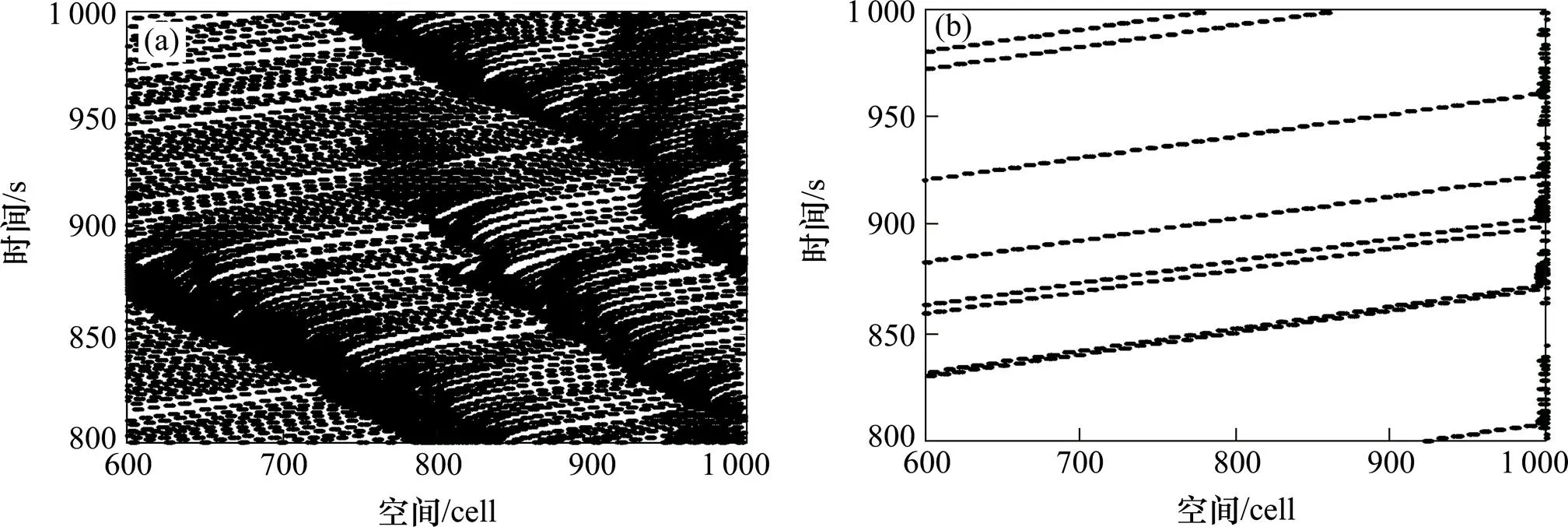
(a) A段道路;(b) B段道路
2.2 交通流量与进车概率的关系


(a) p1=1.0;(b) p1=0.8;(c) p1=0.6;(d) p1=0.4;(e) p1=0.2;(f) p1=0.1
2.3 车辆平均速度与进车概率的关系
由图5(a)~5(f)分析可得,B段道路进车概率2小于0.1时,由于B段道路上的车辆较少,无论A段道路进车概率处于何值,A段道路车辆通过冲突点需要避让的车辆少,故此时B段道路进车概率的变化对A段道路车辆的平均速度影响较小;当A段道路进车概率1>0.2,B段道路进车概率2在0.01~0.2范围内,A段道路车辆出于避让,车辆平均速度随着2的增大而减少,A段道路车辆由自由运行状态变为非自由运行状态,B段道路车辆的平均速度较大,处于自由运行状态;当A段道路进车概率1>0.2,2在0.2~0.4范围内,A和B段道路都出现堵塞,A段道路车辆的平均速度变化不明显,B段道路车辆的平均速度显著减少;2达到0.4之后,A和B段道路都处于堵塞状态,A和B段道路车辆的平均速度都降到2.5 cell/s,车辆速度缓慢。
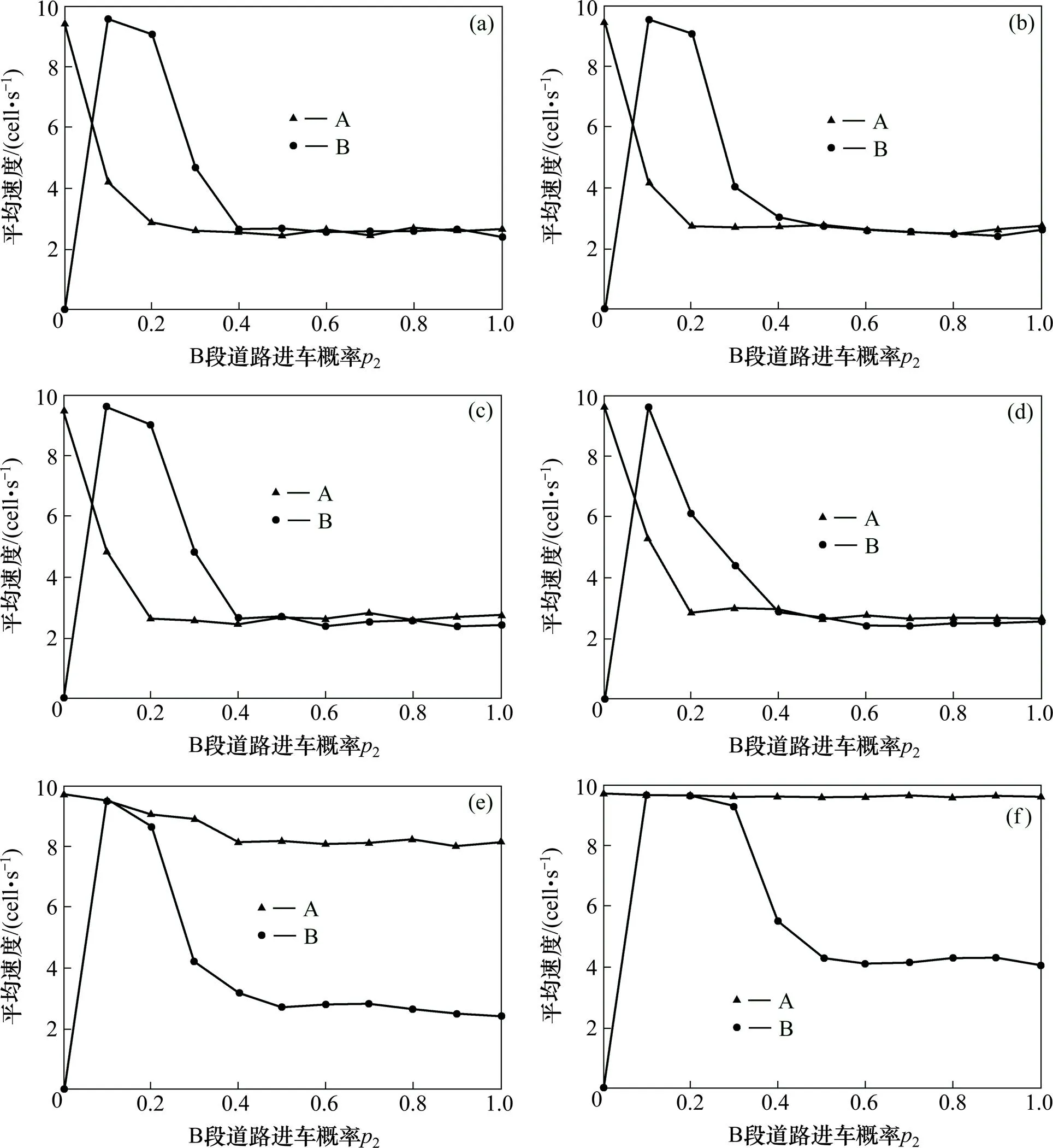
(a) p1=1.0;(b) p1=0.8;(c) p1=0.6;(d) p1=0.4;(e) p1=0.2;(f) p1=0.1
当1=0.2,2在0.1~0.4之间时,A和B段道路车辆的平均速度随2的增大而减小,A和B段道路车辆由自由运行状态变为非自由运行状态;2在0.4~1.0之间时,A和B段道路车辆的平均速度不再随2的增大发生明显变化,A段道路车辆的平均速度大于B段道路车辆的平均速度。而1<0.2时,由于A段道路上车辆少,车辆间隔较大,故基本不受B段道路进车概率影响。
3 结论
1) 基于元胞自动机模型理论,通过对车辆运动特性的观察分析,制定车辆通过无信号控制条件下城市道路冲突点的运动规则,并建立了城市道路单车道冲突车流模型。
2) 通过模型仿真得到城市道路冲突点附近单车道车辆运动的时空特性,反映出道路进车概率的改变对道路堵塞情况的影响。道路进车概率越大,道路车辆聚集现象越明显,道路堵塞情况加剧。
3) 定量分析道路进车概率与通过冲突点的交通流量、车辆平均速度之间的关系,找到了形成道路堵塞的道路进车概率临界值,可为无信号控制的城市道路冲突车流的研究提供参考。
4) 文中建立的元胞自动机模型为单车道模型,在今后的研究中可以扩展至多车道冲突车流模型。
[1] Nagel K, Schreckenberg M. A cellular automaton model for freeway traffic[J]. J Phys I(France), 1992, 2: 2221− 2229.
[2] 张柠溪, 祝会兵, 林亨, 等. 考虑动态车间距的一维元胞自动机交通流模型[J]. 物理学报, 2015, 64(2): 303− 309. ZHANG Ningxi, ZHU Huibing, LIN Heng, et al. One-dimensional cellular automaton model of traffic flow considering dynamic headway[J]. Acta Physica Sinica, 2015, 64(2): 303−309.
[3] 张兴强, 汪滢, 胡庆华. 交叉口混合交通流元胞自动机模型及仿真研究[J]. 物理学报, 2014, 63(1): 010508. ZHANG Xingqiang, WANG Ying, HU Qinghua.Research and simulation on cellular automaton model of mixed traffic flow at intersection[J]. Acta Physica Sinica, 2014, 63(1): 010508.
[4] WANG Yan, PENG Zhongyi, CHEN Qun. Simulated interactions of pedestrian crossings and motorized vehicles in residential areas[J]. Physica A, 2018, 490: 1046−1060.
[5] CHEN Qun, WANG Yan.Cellular automata (CA) simulation of the interaction of vehicle flows and pedestrian crossings on urban low-grade uncontrolled roads[J]. Physica A, 2015, 432: 43−57.
[6] ZHAO Hantao, LIU Xinru, CHEN Xiaoxu, et al.Cellular automata model for traffic flow at intersections in internet of vehicles[J]. Physica A, 2018, 494: 40−51.
[7] Echab H, Lakouari N, Ez-Zahraoy H, et al. Phase diagram of a non-signalized T-shaped intersection[J]. Physica A, 2016, 461: 674−682.
[8] YAO Wang, JIA Ning, ZHONG Shiquan, et al. Best response game of traffic on road network of non- signalized intersections[J]. Physica A, 2018, 490: 386−401.
[9] 李启朗, 孙晓燕, 汪秉宏, 等. 低速十字路口交通流模型相图[J]. 物理学报, 2010, 59(9): 5996−6002. LI Qilang, SUN Xiaoyan, WANG Binghong, et al. Phase diagrams of the crossroad traffic model with low velocity vehicles[J]. Acta Physica Sinica, 2010, 59(9): 5996− 6002.
[10] LI Qilang, WANG Binghong, LIU Muren. Phase diagrams on an unsignalized intersection for the cases of different maximum velocities of vehicles[J].Physica A, 2012, 391: 328−336.
[11] LI Qilang, JIANG Rui, WANG Binghong. Emergence of bistable states and phase diagrams of traffic flow at an unsignalized intersection[J]. Physica A, 2015, 419: 349− 355.
[12] LI Qilang, WANG Binghong, LIU Muren. Phase diagrams properties of the mixed traffic flow on a crossroad[J]. Physica A, 2010, 389: 5045−5052.
[13] SUN Jie, LI Zhipeng, SUN Jian. Study on traffic characteristics for a typical expressay on-ramp bottleneck considering various merging behaviors[J]. Physica A, 2015, 440: 57−67.
[14] FAN Hongqiang, JIA Bin, TIAN Junfang, et al. Characteristics of traffic flow at a non-signalized intersection in the framework of game theory[J]. Physica A, 2014, 415: 172−180.
[15] Pawar D S, Patil G R. Response of major road drivers to aggressive maneuvering of the minor roads drivers at unsignalized intersections: A driving simulation study[J]. Transportation Research Part F, 2018, 52: 164−175.
Cellular automata simulation of traffic conflict on urban road
WU Yuli, CHEN Qun
(School of Traffic and Transportation Engineering, Central South University, Changsha 410075, China)
To study the traffic flow characteristics of two single-lane vehicles entering the same lane under the condition of no signal control, the principle of vehicles passing the conflict point was analyzed and a cellular automata simulation model of traffic conflict on urban road was proposed. The temporal and spatial state of vehicles under different entry probability were analyzed. The influence of the entry probability on vehicle flow volume and average speed of vehicles was analyzed. The main results of the simulation were as follows: when the entry probability of one road is less than the critical value (0.2), vehicle flow volume and average speed are not affected by the entry probability of another road. when the entry probability of one road is more than the critical value (0.2) and the entry probability of another road is more than the critical value (0.01), vehicle flow volume and average speed of this road decreases with the increasing of another road’s entry probability until another road’s entry probability reaches the critical value (0.2).
traffic engineering; traffic conflict; cellular automata; urban road; no signal-control
10.19713/j.cnki.43−1423/u.2019.02.32
U491
A
1672 − 7029(2019)02 − 0528 − 07
2018−01−18
国家社会科学基金资助项目(13CGL001);湖南省科技计划资助项目(2015ZK3003)
陈群(1977−),男,江西九江人,教授,从事交通运输规划与管理研究;E−mail:chenqun631@csu.edu.cn
(编辑 阳丽霞)
