激光星间链路终端指向误差标定中的误差分离研究
2019-02-15程竟爽林益明何善宝王海红国爱燕
程竟爽,林益明,何善宝,王海红,国爱燕
(1. 北京空间飞行器总体设计部,北京 100094;2. 中国空间技术研究院,北京 100094)
0 引 言
导航星座构建激光星间链路[1]时,激光星间链路终端(Laser Communications Terminal,LCT)会产生一定的指向误差(即LCT出射光向量的理想指向与实际指向之间的偏差),需要进行在轨标定[2]。在轨标定过程中,LCT指向误差(测量数据)包含了航天器姿态测量误差和LCT自身指向误差的成分,航天器姿态测量误差会影响LCT指向误差标定结果的准确性。因此,开展LCT指向误差在轨标定中航天器姿态测量误差分离方法的研究具有重要意义。
目前,LCT指向误差在轨标定方法[3]与星敏感器、惯性测量元件等设备在轨标定方法[4]类似,一般分为与航天器姿态有关的方法(如对地观测法[5-7]、恒星观测法[5,8]和链路观测法[9-10]等)和与航天器姿态无关的方法(如终端自检法[11])两类。第一类方法是通过比较已知精确位置信息的信标光源(如地面信标光源、恒星光源与链路对方LCT信标光源等)位置观测值与理论值之间的偏差,利用相应的估计方法估计LCT指向误差参数。该类方法一般需要获取高精度的航天器姿态测量信息,航天器姿态测量误差会使得利用该类方法得到的LCT指向误差参数标定结果偏离实际值;第二类方法则是依靠星上自检光束,利用自检光路标定LCT指向误差参数。这类方法虽然克服了第一类方法中航天器姿态测量误差影响LCT指向误差标定结果的缺点,但只能对LCT内部的部分误差参数进行标定,无法标定LCT外部安装误差等参数。文献[12]结合链路观测法和终端自检法,提出了一种改进的LCT指向误差在轨标定方法,但也没有考虑航天器姿态测量误差对LCT指向误差标定结果的影响。文献[13-15]针对包含测量设备自身偏差在内的航天器姿态估计问题,通过同时估计航天器姿态状态、航天器姿态测量误差与测量设备自身偏差参数,实现了航天器姿态测量误差与测量设备自身偏差参数的分离。但上述方法中测量元件利用其大视场(如星敏感器)或多轴安装(如惯性测量元件)的特点能够同时获取不同方向的测量数据,而LCT图像传感器受视场限制只能获取单一方向的测量数据,因此该方法不能直接应用于有航天器姿态测量误差时的LCT指向误差在轨标定中。
针对上述问题,本文将开展航天器姿态测量误差对LCT指向误差标定结果的影响分析,在文献[12]的基础上提出基于多链路测量的航天器姿态测量误差分离方法,利用导航星座中同一航天器建立多条链路的特点,同时估计航天器姿态测量误差和LCT指向误差参数,从而剔除(或降低)航天器姿态测量误差对LCT指向误差标定结果的影响,提高LCT指向误差在轨标定结果的准确性。
1 LCT指向误差标定基本原理与航天器姿态测量误差对标定结果的影响分析
1.1 LCT指向误差标定基本原理
tk时刻,航天器姿态向量θb,k,LCT的转动角度向量θLCT,k和LCT入射光向量ur,k分别为
(1)
式中:θb,k,φb,k,ψb,k为航天器的姿态角,θg,k,φg,k,ψg,k分别为LCT粗指向机构的转角,θs,k,φs,k,ψs,k分别为精指向机构的转角,xr,k,yr,k和zr,k分别为ur,k在惯性系I-XiYiZi中的三轴分量。
如图1所示[10],LCT指向误差标定时,入射光经粗指向机构平面反射镜M和N、望远镜Te、精指向机构快速反射镜S及光学中继元件BS等构成的接收光路传输,在图像传感器F上形成光斑。

图1 LCT接收光路与相应的坐标系Fig.1 Optical receive path in LCT and corresponding system coordinates
LCT存在基座、内部光学元件安装误差、轴系误差、指向机构零位误差等系统误差,上述误差统一记为参数形式的LCT指向误差向量xLCT,即
xLCT=[Δxi, Δyi,Δzi]T
(2)
式中:Δxi,Δyi,Δzi分别为第i类误差因素对应的三轴分量。xLCT可认为是常值向量。
依据文献[12]中式(3),(4)给出的LCT指向误差模型,光斑理想位置与实际位置的偏差向量l1,k为
l1,k=f(θb,k,θLCT,k,ur,k,xLCT)
(3)
式中:f=[f1,g1]T为l1,k与θb,k,θLCT,k,ur,k和xLCT之间的函数关系,f1,g1的含义参见文献[12]。

(4)

将式(4)代入式(3)中,得到
(5)
对式(5)进行展开并简化,忽略高阶项,得到
(6)
εk=HkXk+εk
(7)

在轨标定经历N次采样,k=1,2,…,N,则整个采样区间内对应的单链路测量方程组为
YN=HNX+E
(8)
式中:
若忽略Δθb,k,ΔθLCT,k和Δur,k,式(7)简化为
(9)
类似,式(8)简化为
(10)


(11)
式中:W是指向误差在轨数据的权值矩阵。
1.2 航天器姿态测量误差对标定结果的影响分析
为了定量分析Δθb,k对xLCT标定结果的影响,进行如下的仿真,参数设置与仿真过程分别见本文3.1节与3.2节,LCT指向误差标定结果如表1所示。(表中σθb为Δθb,k(假设服从零均值正态分布)的标准差,偏差为估计值与设定值之间的差值,最大偏差为同列偏差的最大绝对值。)
由表1可见,在给定的LCT指向误差参数条件下,当σθb由20 μrad增大到200 μrad时,ε由10.4 μrad逐渐上升到164.0 μrad,即随着航天器姿态测量误差的增大,LCT指向误差标定结果最大偏差逐渐增大,说明航天器姿态测量误差对LCT指向误差标定结果有着显著影响,需要将航天器姿态测量误差从LCT指向误差测量数据中分离出去。
2 基于多链路测量的航天器姿态测量误差分离


表1 不同航天器姿态测量误差条件下LCT指向误差标定结果Table 1 Estimation values of LCT pointing error parameters under different spacecraft’s attitude measurement errors
2.1 在轨标定源选择
LCT指向误差在轨标定一般选择具有较强方向性的信标光源(如地面信标光源、恒星光源等)作为在轨标定源。基于国内导航星座星间链路距离在20 000~50 000 km、导航卫星定轨精度约为1~10 m,LCT入射光角度偏差(由航天器定轨误差引起)约为0.02~0.5 μrad(经放大变换后仍小于LCT图像传感器的角分辨率)的技术现状,选择链路发送端的信标光源作为在轨标定源。
2.2 多链路测量方程组建立
估计LCT指向误差参数时,待估计参数向量XN的维度nXN=3N+6,而测量方程组的秩rank≤2N,方程组亏秩,导致XN存在多个非平凡解。可见,由单一链路的测量数据无法同时估计航天器姿态测量误差与LCT自身指向误差参数。为此,本文引入多链路测量数据,建立多链路测量方程组。
设单一航天器搭载M台LCT,每台LCT与对方LCT建立一条链路,则将式(7)改写为
(12)

扩展式(12),得到tk时刻的多链路测量方程组为
YM,k=HM,kXM,k+EM,k
(13)

扩展式(13),整个采样区间的多链路测量方程组
YMN=HMNX+EMN
(14)

此时,由于X维度nX=nxLCT+nΔθb,k=3N+6M,而测量方程组的秩≤2MN。可以看出,式(10)利用了多条链路中航天器平台姿态测量误差的相关性,从而获得了冗余的测量数据。
2.3 LCT指向误差参数估计与误差分离

(15)
2.4 误差分离前后的精度比较


(16)
(17)


(18)
(19)


3 航天器姿态测量误差分离方法有效性验证
本节对航天器姿态测量误差分离方法的有效性进行仿真验证。
3.1 仿真工况参数设置
本文假设导航星座为Walker 24/3/1星座,该星座三个轨道面编号分别为A,B,C,星座构型如图2所示。A轨道面内第一相位(编号为A1,其他编号以此类推)的卫星的轨道参数[17]如表2所示。导航星座内部构建激光星间链路网络,依据星间链路建立约束条件[18],其中部分卫星间可建立持续链路。

图2 Walker 24/3/1星座构型Fig.2 Configuration of Walker 24/3/1 constellation

卫星轨道参数设定值半长轴/km27 906偏心率0.1轨道倾角/(°)55升交点赤经/(°)0近地点幅角/(°)0过近地点时刻0
考虑到导航卫星的特点,假设卫星本体仅做偏航运动。设置σθb分别为20、100和200 μrad。各LCT的安装形式使得LCT基座坐标系G-XgYgZg与航天器本体坐标系B-XbYbZb保持一致,LCT指向误差参数设置[9]如表3所示。望远镜放大倍率m=20。
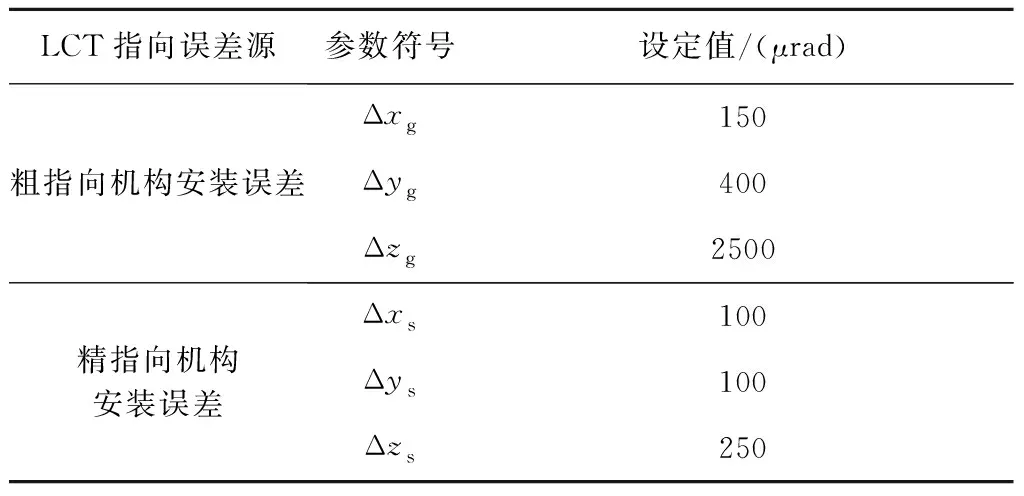
表3 LCT指向误差参数设置Table 3 Settings of LCT pointing error parameters
3.2 仿真过程

(20)
具体仿真结果见表1。
3.3 航天器姿态测量误差分离方法有效性验证
设σθb=100 μrad,依据提出的航天器姿态测量误差分离方法,获取不同链路的观测数据,计算得到各参数的估计值,比较分离前后的ε。若分离后的ε更小,说明航天器姿态测量误差分离方
法有效。
1)链路条数


表4 不同链路条数条件下LCT指向误差标定结果Table 4 Estimation values of LCT pointing error parameters with measurements from different number of links

2)链路拓扑构型
以4条链路为例,按照原则:1)链路拓扑构型包含2条同轨链路和2条异轨链路;2)链路拓扑构型尽可能对称,依据链路建立约束条件设计10种链路拓扑构型。其中构型1和构型6如图3所示。
构型1和构型6条件下,估计结果分别如图4和图5所示,图中Δθb,x, Δθb,y与Δθb,z分别表示航天器姿态测量误差沿X,Y与Z轴的分量。

图3 拓扑1构型条件下航天器姿态测量误差估计结果Fig.3 Estimation results of spacecraft attitude measurement error with topology No.1


图4 拓扑6构型条件下航天器姿态测量误差估计结果Fig.4 Estimation results of spacecraft attitude measurement error with topology No.6
4 结 论
1)航天器姿态测量误差对LCT指向误差标定
结果有显著影响。随着航天器平台姿态测量误差的增大,LCT指向误差标定结果最大偏差逐渐增大。当航天器姿态测量误差由σθb=20 μrad增大到σθb=200 μrad时,LCT指向误差标定结果最大偏差由10.4 μrad逐渐上升到164.0 μrad。
2)本文提出的基于多链路测量的航天器姿态测量误差分离方法能够有效降低航天器姿态测量误差对LCT指向误差标定结果的影响。具体表现为:LCT指向误差标定结果最大偏差由误差分离前的64.9 μrad下降到误差分离(6条链路)后的21.1 μrad。
3)该误差分离方法的有效性取决于链路条数和链路拓扑构型。链路条数增加,LCT指向误差标定结果最大偏差逐渐下降。建议采用5到6条链路(至少2条链路)进行误差分离。在确定链路条数后,应依据链路建立约束条件,在可用的链路拓扑构型中优选出适用的拓扑构型。

图5 链路拓扑构型1和6(4条链路)Fig.5 Link topologies 1 and 6(4 links)

LCT指向误差源参数符号设定值/(μrad)估值与偏差/(μrad)构型1构型2构型3构型4构型5估值偏差估值偏差估值偏差估值偏差估值偏差粗指向机构安装误差Δxg150148.6-1.4148.2-1.8148.7-1.3148.9-1.1150.4-0.4Δyg400388.4-11.6390.7-9.3390.2-9.8390.9-9.1389.7-10.3Δzg25002501.51.52501.31.32501.41.42501.31.32500.80.8精指向机构安装误差Δxs10083.9-16.195.8-4.292.8-7.298.8-1.295.4-4.6Δys10095.4-4.693.3-6.788.1-11.988.8-11.253.4-46.6Δzs25025002500250025002500最大偏差ε16.19.311.911.246.6

续表
