变稳直升机构型系统设计及纵向飞行仿真验证
2022-04-22方威邱天林李德尚王浩伟
方威, 邱天林, 李德尚, 王浩伟
(中航工业飞行仿真航空科技重点实验室, 陕西 西安 710089)
空中飞行模拟是借助于变稳飞机来模拟另一架飞机在空中飞行中的动态响应特性,使驾驶员感觉是在操纵所要模拟的飞机,从而开展飞行品质等方面的研究。目前试飞院已有国内唯一一架综合空中飞行模拟试验机,二十多年期间成功完成了固定翼飞机的新机控制律验证、国内外多批次试飞员及试飞工程师的教学培训,但对于旋翼类变稳机国内还是空白。在我国直升机研制由仿制向自主研制的转型阶段过程中,以及对新型攻击直升机、重型运输直升机等机型的迫切需求的背景下,开展变稳直升机研制及飞行试验意义重大。变稳直升机同其他空中飞行模拟器类似,用于模拟另一架直升机在空中飞行中的稳态及动态响应特性,因此如何改变直升机的响应特性成为重要研究内容。本文针对如何实现变稳直升机的响应特性变化问题,提出了一种构型设计的解决方法,通过构型控制律参数调整和构型切换逻辑的应用,改变直升机飞行特性。
国外对于构型设计技术的研究主要在变稳飞机和变稳直升机[1]上开展。20世纪80年代,美国卡尔斯潘公司选用Learjet飞机为平台研制新一代的变稳飞机,飞机的纵向和横航向操纵及响应特性可以实时改变,从而极大丰富了试飞员、试飞工程师的培训内容[2]。同时期,中国飞行试验研究院先后成功研制了BianWen-1型变稳试验机和综合空中飞行模拟试验机IFSTA[3]。在IFSTA飞机上,采用了变稳系统状态控制器,其面板上有8个拨打开关,驾驶员通过拨动这些开关可选择8组给定的构型参数,改变飞机的操纵响应特性,其缺点是扩展性不足,而且在一个飞行架次内只能选择纵向控制或横向控制,降低了飞行试验效率。
1 构型系统设计原理
在控制通道和控制律参数确定的条件下,直升机所体现出的动态响应特性可对应于变稳直升机的一个构型;当改变控制通道或改变控制律参数值,则可得到不同的构型。比如控制通道可选择中央杆纵向通道、中央杆横向通道、侧杆纵向通道、侧杆横向通道、脚蹬航向通道、总距通道等;反馈参数根据响应类型分为角速率、姿态角、速度、高度等反馈参数。
构型控制系统设计的目的是能够准确且可靠地改变控制通道和控制参数,其拓扑图如图1所示。
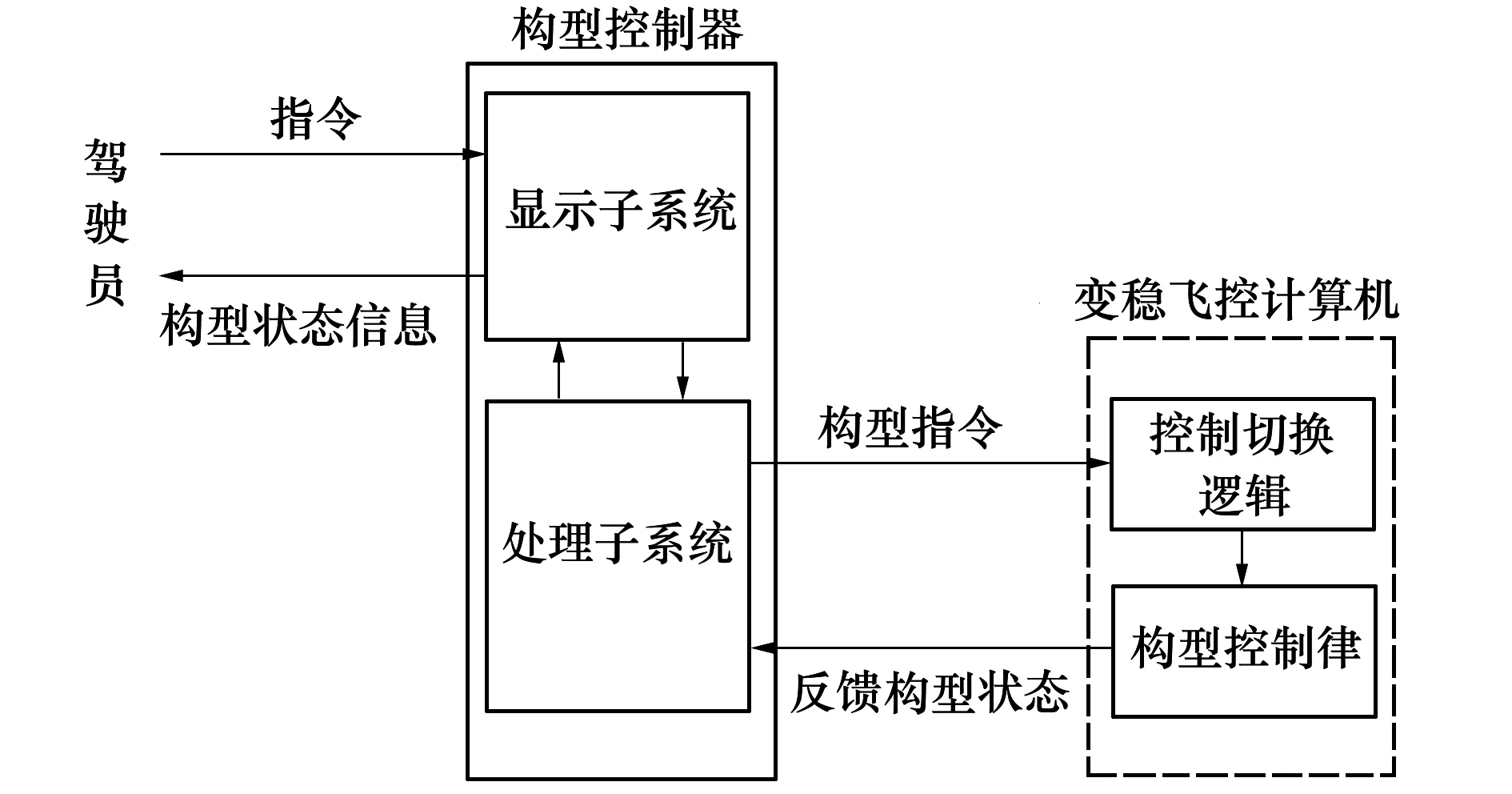
图1 构型系统拓扑图
构型控制系统的核心主要由显示子系统、处理子系统、构型切换逻辑和构型控制律4个部分组成,其中前两部分在构型控制器中,后两部分在变稳飞控计算机中。显示系统为驾驶员提供构型码、控制通道、控制律参数等构型信息及指令输入[4];处理子系统负责将指令以特定协议传送至变稳飞控计算机,同时将接收的飞控返回信息解析至显示子系统;构型切换逻辑根据安全条件决定接收或者拒绝选择的构型;构型控制律最终接收构型指令并同步更新各控制通道的参数[5]。
2 构型系统设计方法
构型设计方法主要包括构型设计控制策略、构型切换逻辑和构型控制律设计。
2.1 构型设计控制策略
构型设计控制策略内容包括构型种类和数量设计、人机工效设计。
构型种类包括基本构型和可选构型。基本构型为直接链加增稳模态,也是默认构型;可选构型分为一级构型和二级构型,由控制通道和配置参数确定。
如控制通道分为纵向、横向、航向、总距等,根据控制通道分配的构型定义为一级构型;配置参数有频率、阻尼比、操纵功效、时间延迟等,每个具体参数可设置不同数值,比如阻尼比可设置为小阻尼比、中阻尼比和大阻尼比,根据配置参数分配的构型定义为二级构型。将控制通道和参数组合,可配置出多种可选构型。
在人机工效设计方面,为避免驾驶员因误操作而使构型生效,或者选择构型后并没有执行该构型等状况发生,需研究构型显示方式及驾驶员操作方式。构型显示方式将构型码显示分为当前构型码和预选构型码2个显示区域,当前构型码显示为有效且正在执行的构型,预选构型码为驾驶员已选定的目标构型。若当前构型码和预选构型码数值一致,表明构型生效且运行正常;若当前构型码和预选构型码数值不一致,表明选择的目标构型没有被执行。驾驶员操作上分为2步,第一步是通过按压构型确认键完成构型加载,构型显示界面中同步更新预选构型码数值;第二步是通过按压接通键完成构型生效,构型界面同步更新当前构型码数值,飞控系统执行当前构型。通过驾驶员的2步操作方式从而降低因为误操作而使构型生效的风险,且驾驶员通过比较当前构型码和预选构型码2个码值,可判断所选择的构型是否被立即执行。
2.2 构型切换逻辑
构型切换逻辑包括构型分类、构型间切换状态和构型转换流程。
构型分类如图2所示,上电构型是飞控上电或复位后,完成必要的初始化工作后,若轮载开关无效,自动进入实时任务,此时变稳舵机离合器断开,仍然由安全驾驶员操纵。

图2 构型分类
本文描述的直升机变稳控制系统具有周期变距杆控制模式和侧杆控制模式,因此根据周期变距杆操纵和侧杆操纵具有不同的变稳控制律,将变稳直升机构型分为周期变距杆操纵和侧杆操纵两大类。
周期变距杆下具有电传模态和变稳模态:
1) 电传模态包括直接链构型和增稳构型,均可控制纵向、横向、航向和总距4个方向。其中直接链构型为变稳系统下的基本构型。
2) 变稳模态包括纵向构型、横向构型、航向构型、总距构型、典型构型及基本构型。
侧杆下具有电传模态和变稳模态:
1) 电传模态包括电传构型,均可控制纵向、横向、航向和总距4个方向。
2) 变稳模态包括纵向构型、横向构型、典型构型及基本构型。
构型间切换状态包括周期变距杆与侧杆之间的各构型切换,周期变距杆下的各构型切换和侧杆下的各构型切换。
周期杆与侧杆间的切换如图3所示。

图3 周期杆与侧杆间的构型切换
考虑到飞行安全,周期变距杆下的构型不能直接进入到侧杆操纵下的构型,需要先退回到原机操纵,再接通进入侧杆操纵下的构型;侧杆操纵下的构型也是先退回到原机操纵再进入周期变距杆下的构型。
侧杆下的构型切换同周期变距杆下的构型切换类似,本文主要介绍周期变距杆下的构型切换。周期变距杆下的构型切换分为2种,控制通道之间的构型切换和给定控制通道内部构型的切换。
控制通道之间进行切换,如图4所示。其中以原机操纵为过渡阶段,其他构型通过原机操纵进行相互切换。比如当前构型需先退回到原机操纵;再由原机操纵进入新构型。增稳构型和直接链构型可以直接切换,其他构型之间不能直接切换。

图4 控制通道之间构型切换
对于给定控制通道内部构型切换,如图5所示。对于相同控制通道的构型,比如周期杆纵向构型1和周期杆纵向构型2的,只是参数配置不同,相互之间可以直接切换,无需退回到原机操纵。

图5 控制通道内部构型切换
构型转换流程如图6所示。构型切换流程主要包括飞控接收构型控制器的总线数据处理逻辑及构型转换逻辑。总线数据处理逻辑包括数据解析、校验及预选构型计数;构型转换逻辑包括预选构型与当前构型比较,若符合构型转换逻辑则当前构型变为预选构型,若不符合构型转换逻辑则当前构型保持不变。
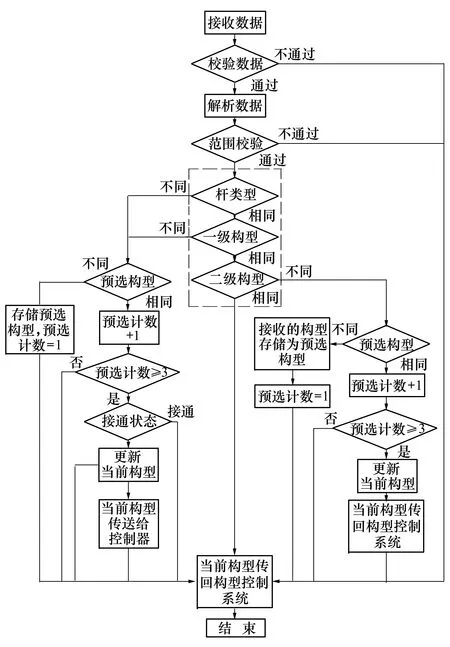
图6 构型转换流程图
2.3 构型控制律设计
构型控制律设计需考虑变稳直升飞机的包线、舵机速率等系统限制条件,控制方法的选取主要分为响应反馈和模型跟随2种方法[6-7],并根据具体的应用来确定某种方法[8]。
本文构型控制律设计采用响应反馈控制方法,将机体三轴角速率、体轴法向速率作为反馈量,从而改善系统的稳定特性[9-10]。通过前馈增益系数和反馈增益系数的参数配置得到不同的构型,从而实现响应特性的改变。
本文以纵向构型控制律设计为例进行介绍。图7为纵向构型控制律基本原理框图,变稳控制中的纵向阻尼、操纵功效、时间延迟等特性通过改变前馈增益、反馈增益和时间延迟环节实现。

图7 纵向构型控制律基本原理图
其中,阻尼特性变稳主要通过控制增稳反馈回路的反馈增益条件来实现,反馈参数越大,阻尼越大;反馈增益越小,阻尼越小。操纵功效的变稳通过改变前馈增益来实现。时间延迟特性通过增加时间延迟环节来实现。时间延迟可能是纯时间延迟,例如飞控计算处理延迟或采样率延迟,或滤波器产生的延迟,或低阶系统的机械反弹。
3 飞行仿真
飞行仿真试验环境为包含原机机械杆系的变稳直升机地面台架系统,如图8所示。其中左驾驶位为试验驾驶员,右驾驶位为安全驾驶员,构型控制器通过RS422总线与变稳飞控计算机通讯;变稳飞控计算机接收可变人感指令及构型指令,经控制律解算后输出舵机指令至4个方向舵机,舵机带动原机杆系和助力器运动,同时助力器反馈位置信号给模型解算计算机;模型解算计算机实时运行直升机仿真模型,输出状态参数至视景显示计算机,驱动三通道投影仪,实现地面台架系统的飞行仿真功能。

图8 地面台架系统结构图
仿真试验分为两部分,包括构型间切换仿真和切换后的响应特性模拟。构型间切换仿真主要验证构型转换流程是否正确。通过构型界面进行设置,图9和图10分别显示预选构型有效和无效状态下的显示界面。图9中,驾驶员选择101构型,预选构型同时改变为101,之后按下接通按键,此时当前构型显示101,表示构型选择有效,当前飞机响应特性为纵向的一级频率特性;若此时选择204构型,如图10所示,预选构型相应显示204,但由于此时没有退回到原机模态,此时当前构型仍为101,表明构型选择无效,需退回至原机模态并再次按压接通按钮,当前构型变为204,构型生效,当前飞机响应特性变为横向的一级阻尼特性。

图9 纵向构型显示界面 图10 横向构型显示界面
本文的响应特性模拟试验均为纵向模拟,以某型直升机为本体飞机,采用响应反馈方法,试验内容包括典型Ⅰ、Ⅱ、Ⅲ级飞行品质[11]下的阻尼比、操纵功效和时间延迟的模拟。纵向构型控制律如图11,具体试验内容及结果如图12~14所示。

图11 纵向构型控制律图

图12 变阻尼比模拟 图13 变操纵功效模拟
1) 变阻尼比模拟
选取直升机状态点为高度1 000 m,悬停状态,选取构型为101,102和103。纵向推杆10 mm,得到不同阻尼比响应曲线如图12所示,其中Xb为纵向周期变距杆位移,θ为直升机俯仰角,q为直升机俯仰角速率。当构型为101,反馈K值调节为0.5,响应为小阻尼特性,对应实线响应曲线;当构型为102,反馈K值调节为1,响应为中阻尼特性,对应点画线响应曲线;当构型为103,反馈K值调节为1.5,响应为大阻尼特性,对应虚线响应曲线。从θ和q响应曲线可知,反馈值变大对应直升机的阻尼比变大,直升机稳定性增强。
2) 变操纵功效模拟
直升机状态点为高度1 000 m,悬停状态,纵向推杆10 mm,通过改变构型及前馈增益[12]得到不同操纵功效响应曲线如图13所示。当构型为110,前馈增益较低,对应实线响应曲线,此时俯仰角速率较小,俯仰角变化幅值也较小;当构型为112,前馈增益较高,此时俯仰角速率较大,俯仰角变化幅值也较大。从θ和q响应曲线可知,前馈增益越大,对应直升机的操纵功效越大,在相同的杆量输入条件下直升机响应的幅值越大。
3) 变时间延迟模拟
直升机状态点为高度1 000 m,悬停状态,纵向倍脉冲操作,调节时间延迟常数分别为4,80和200 ms,得到不同时间延迟响应曲线如图14所示;当构型为114,延迟小,对应实线响应曲线,此时俯仰角速率和俯仰角随指令变化较快,容易操纵;当构型为116,延迟大,对应虚线响应曲线,此时俯仰角速率和俯仰角随指令变化较慢,较难操纵。从θ和q响应曲线可知,当增加时间延迟常数,脉冲输入会导致直升机响应发散。

图14 变时间延迟模拟
4 结 论
变稳直升机在研制及应用过程中,需要考虑直升机响应特性变化的实现方式以及安全性设计。基于此,本文研究变稳直升机构型系统设计,从构型设计控制策略、构型控制律设计和构型切换逻辑三方面进行分析设计,并通过数值仿真以及地面台架试验验证了构型间切换逻辑仿真,以及改变构型后的变阻尼比、变操纵功效、变时间延迟等特性模拟。结果表明,通过构型系统设计,实现了变稳直升机构型之间的可靠切换以及纵向特性大范围的变化,达到了预期效果,为变稳直升机研制及后续飞行试验奠定了技术基础。
