基于帧间数据处理的杂波点迹滤除技术研究
2019-01-16李宏伟
李宏伟,汪 洋
(中国人民解放军92941部队,辽宁 葫芦岛 125000)
0 引言
雷达在搜索和跟踪过程中不可避免地会受到地物杂波、气象杂波等的影响,在信号处理检测时会产生杂波点迹,尤其是在杂波密集区,此类杂波点迹数量会更多[1-3]。信号处理若将这些所有检测点迹包括真实目标点迹和杂波点迹全送往空情显控台,会干扰雷达操作员对目标信息和空情态势的准确把握,降低其人工干预操作的正确率,因此需要对杂波点迹进行滤除。
杂波滤除的方法主要有基于帧内处理的滤除方式和基于帧间处理的滤除方式两大类。帧内处理又分为基于信号级处理的滤除和基于数据级处理的滤除,基于信号级处理的滤除即在信号处理过程中使得杂波回波尽可能不形成杂波点迹输出[4-5],基于数据级的滤除即对利用单帧的杂波点迹和目标点迹的特征统计分析后对杂波点迹进行数据级滤除。帧间处理主要是基于帧间目标和杂波运动等特征的不同,在数据级上进行杂波点迹滤除。
本文针对搜索警戒雷达在该方面的技术需求,提出了一种基于帧间数据处理的杂波点迹滤除方法,实时地对单个驻留内的回波进行相关处理,同时辅以速度、幅度和RCS等门限控制提高杂波点迹正确滤除率[6-8]。该方法将输入原始点迹进行质量划分,并滤除送往空情显控台的杂波点迹,大大提高了显控输入点迹质量。
本文利用某雷达实际跟飞数据对该方法的有效性进行验证,从数据分析结果可以看出,通过该方法的处理,在此类试验场景下,可以大幅度地滤除杂波点迹,并完整地保留真实目标点迹,提高空情显示的清晰度和可视度。
1 算法原理和算法设计
1.1 算法原理
基于帧间处理的杂波点迹滤除原理框图如图1所示,当雷达接收到一个波位的点迹数据后,即进入处理流程,通过帧间的相关处理对所有点迹进行等级划分。这里将航迹化分为3个阶段:确认航迹阶段、潜在航迹阶段和临时航迹阶段。在帧间点航相关处理中,与不同阶段航迹就表明该点迹的质量等级存在不同,得到4个不同的点迹等级。这种相关处理,除了考虑目标运动状态信息的相关之外,还可以对距离展宽、幅度信息和RCS信息等进行利用,以提高杂波点迹滤除率,对于不同的目标,这些信息的可利用程度也存在差异。从处理流程上看,主控需要对等级较低的点迹进行缓存,直至超过点迹设定寿命结束门限才确定为真正的杂波点。显控可以根据选择开关对一次点迹信息进行选择性显示。

图1 杂波点迹滤除处理原理
基于帧间相关处理对点迹等级进行划分的结果如表1所示,在一次驻留内进行实时处理,将一次驻留的所有点迹划分4个等级:
① 与已有稳定确认航迹关联的点为等级最高的点迹,确定为真实目标点迹的概率非常高,为等级1点迹。对确认航迹的点航关联设置专门的门限参数;
② 与潜在航迹关联的点为等级2点迹,一般采用连续N拍相关上的准则进行潜在航迹向确认航迹的切换,同时对潜在航迹的点航相关设置专门的门限参数;
③ 与临时航迹关联的点为等级3点迹,一般采用N1/M1准则进行临时航迹向潜在航迹的切换,同时对临时航迹的点航相关设置专门的门限参数,该参数的范围比潜在航迹的点航相关参数阈值要大;
④ 在M1次照射中达不到N1次相关的点迹为孤立点迹,即为等级4点迹。对于等级4点迹主控进行缓存,用于后续验证是否为新出现目标点迹,当一个点迹的缓存时间超过ns(n按照实际情况进行设置,一般为多次照射的总时长)后仍为孤立点迹则视为杂波点迹,予以滤除。若某孤立点迹为新生目标点迹,在后续的M1次照射后则转为等级3点迹。
表1 点迹等级划分
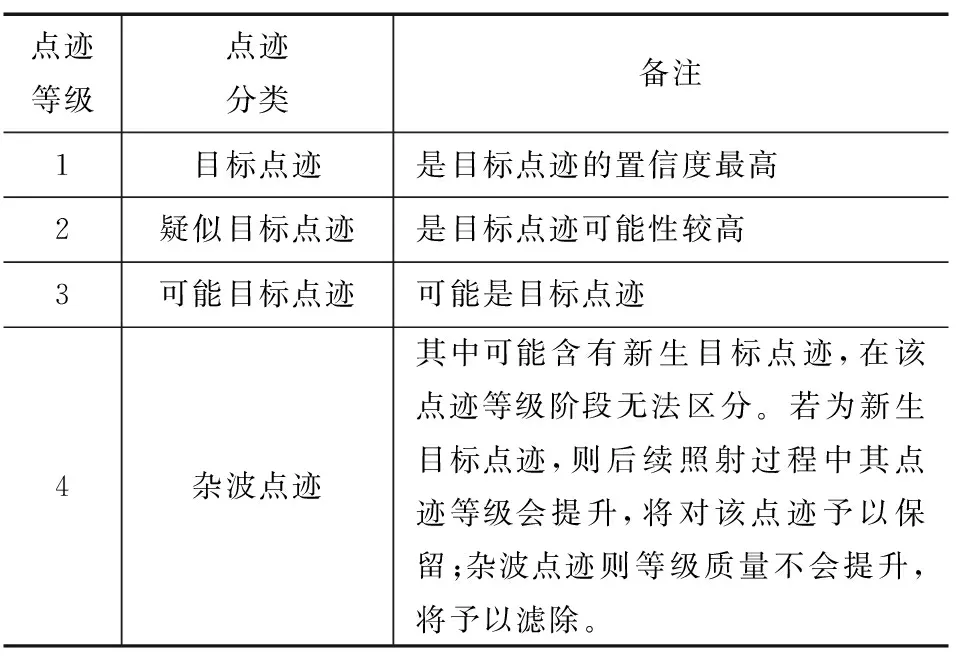
点迹等级点迹分类备注1目标点迹是目标点迹的置信度最高2疑似目标点迹是目标点迹可能性较高3可能目标点迹可能是目标点迹4杂波点迹其中可能含有新生目标点迹,在该点迹等级阶段无法区分。若为新生目标点迹,则后续照射过程中其点迹等级会提升,将对该点迹予以保留;杂波点迹则等级质量不会提升,将予以滤除。
1.2 算法设计
1.2.1 主要算法模块设计
该杂波点迹滤除原理中有2个主要的算法模块:
① 数据关联算法模块(含逻辑法的航迹起始模块)
常用的数据关联算法包括GNN,JPDA[7],MHT[8-9],PHD[10-12],IPDA和多伯努利滤波器[13]等,本文选用GNN方法。这里将航迹起始功能的实现合并在数据关联算法模块内,航迹起始采用逻辑法起始,便于工程实现。
② 航迹滤波算法模块
常用的航迹滤波算法包括α-β,α-β-γ,EKF,UKF等。当目标存在机动的情况下,可以考虑基于多个模型的IMM[14-15]算法,本文对滤波算法不展开讨论。本文的分析对象主要是跟踪飞机目标,且不考虑其机动的情况,因此对试验数据进行分析时采用混合坐标系下的α-β跟踪算法。采用混合坐标系即在雷达阵地直角坐标系下进行目标运动状态向量的预测,在雷达阵面方向余弦坐标系下进行滤波更新处理。这样处理的好处是消除目标运动相对于雷达站址的视在加速度的影响,同时降低雷达测量非线性对航迹滤波精度的影响。
1.2.2 径向速度辅助的数据关联
信号处理输出的点迹信息中,除了目标的位置信息外,还包括目标的诸多属性信息,这些属性信息的可信度如何、如何建模、能否用来辅助数据关联等是有待持续研究的问题[16-17]。若点迹属性信息的可信度不高,或者属性信息与运动信息的权值分配不当,都有可能降低关联的正确率。当雷达具有目标径向速度测量能力时,可选择径向速度信息对确认航迹进行辅助的点航关联处理。
当目标相对雷达的径向速度较小时,雷达探测得到的径向速度误差较大,可信度低,因此直接将其用来辅助数据关联,可能不会达到理想的效果。算法中可利用径向速度信息对确认航迹进行辅助关联,其实现方法如下:
① 对确认航迹进行关联时,判断确认航迹的径向速度滤波绝对值是否大于预设门限;
② 若确认航迹的径向速度绝对值大于门限,则对点迹的径向速度的方向进行判断,只选择与确认航迹径向速度方向一致的点迹进行后续的关联判决;
③ 若确认航迹的径向速度过小,其对应的点迹的径向速度测量误差较大,可信度不高,此时不利用点迹的径向速度信息辅助关联。
1.2.3 精细化设计的关联门限
这里设置3个点航相关门限,分别为临时航迹关联门限、潜在航迹关联门限和确认航迹关联门限。相关门限大小顺序为:
临时航迹关联门限>潜在航迹关联门限>确认航迹关联门限。
每个门限设置考虑多个关联因素,包括典型的归一化的椭球RAE位置误差门限,还可以设置速度门限、距离展宽门限、RCS起伏门限和幅度起伏等[18-19]。
相关门限存在正向调整和逆向调整2个过程,正向调整为门限逐渐缩小的过程,典型的是航迹阶段从临时航迹到潜在航迹再到确认航迹这一过程中,相关门限逐渐缩小。逆向调整过程是门限扩大的过程,即当航迹的连续多拍未相关上点迹,则相关门限应进行扩大,直至满足航迹删除条件。
在进行点航关联时,需要对关联区域和关联门限进行设置,同时针对目标的类型和运动特点对目标的运动模型加以约束,以获得最佳的点迹-航迹关联配对结果。本文在对多目标进行关联时,采用了多层次的关联门设计:
① 距离和方位角度分区:在进行点航关联时,由于雷达扫描覆盖范围较大,为避免不同区域的点迹和航迹进行关联计算而增加不必要的计算量,对扫描区域在距离和角度上分别进行分区,若该帧点迹与某条航迹上一帧的位置不在同一区域内,则将其关联值设为极大值,即不进行关联。
② 径向速度方向判断:对距离和方位处在同一分区内的点迹和航迹,对其径向速度的方向进行判断,与航迹径向速度方向一致的点迹才能与其进行关联,否则将其关联值设为极大值。
③ 全速度门限约束:对关联门内剩余的点迹计算点航关联后的全速度,并与全速度门限(最大速度和最小速度)进行比较,对于不在全速度门限范围内的关联点迹,设置其关联值为极大值。
④ 精关联门限设置:前3项关联约束可视为点航粗关联,对粗关联门内的点迹进一步进行精关联,计算关联值。首先对航迹进行预测,得到点迹与预测位置的信息,计算归一化关联值:

针对不同的航迹状态,精关联门限的设置不同:
① 确认航迹:一旦某条航迹被确认,该条航迹即处于稳定跟踪状态,此时其位置和速度信息较为稳定,预测位置和目标的实际位置相差不大,此时采用较小的关联门限即可保证目标点迹正确关联,一般确认航迹的精关联门限可根据椭圆波门及其落入概率进行计算。
② 潜在航迹:潜在航迹介于临时航迹和确认航迹之间,此时航迹已经具有起始的位置和速度,但其位置和速度误差相对较大,在进行点航关联时,不能设置过于严苛的门限,否则易导致目标点迹丢失。潜在航迹的关联门限一般可设置为确认航迹关联门限的n倍,n值可根据实际场景进行调整。
③ 临时航迹:通常,大多数临时航迹只包含一个点,此时目标只有初始化的位置信息,而没有速度信息,其关联门限可设置为:
式中,Vmax为目标运动的最大速度;Tscan为雷达的扫描周期;σR为距离测量噪声均方根值;C为可调整参数。
对某次驻留点迹与确认航迹的多层次关联过程进行描述,如图2所示,通过4重关联判决,最终得到点迹-航迹关联矩阵,通过分配算法获得点迹-航迹配对关系。
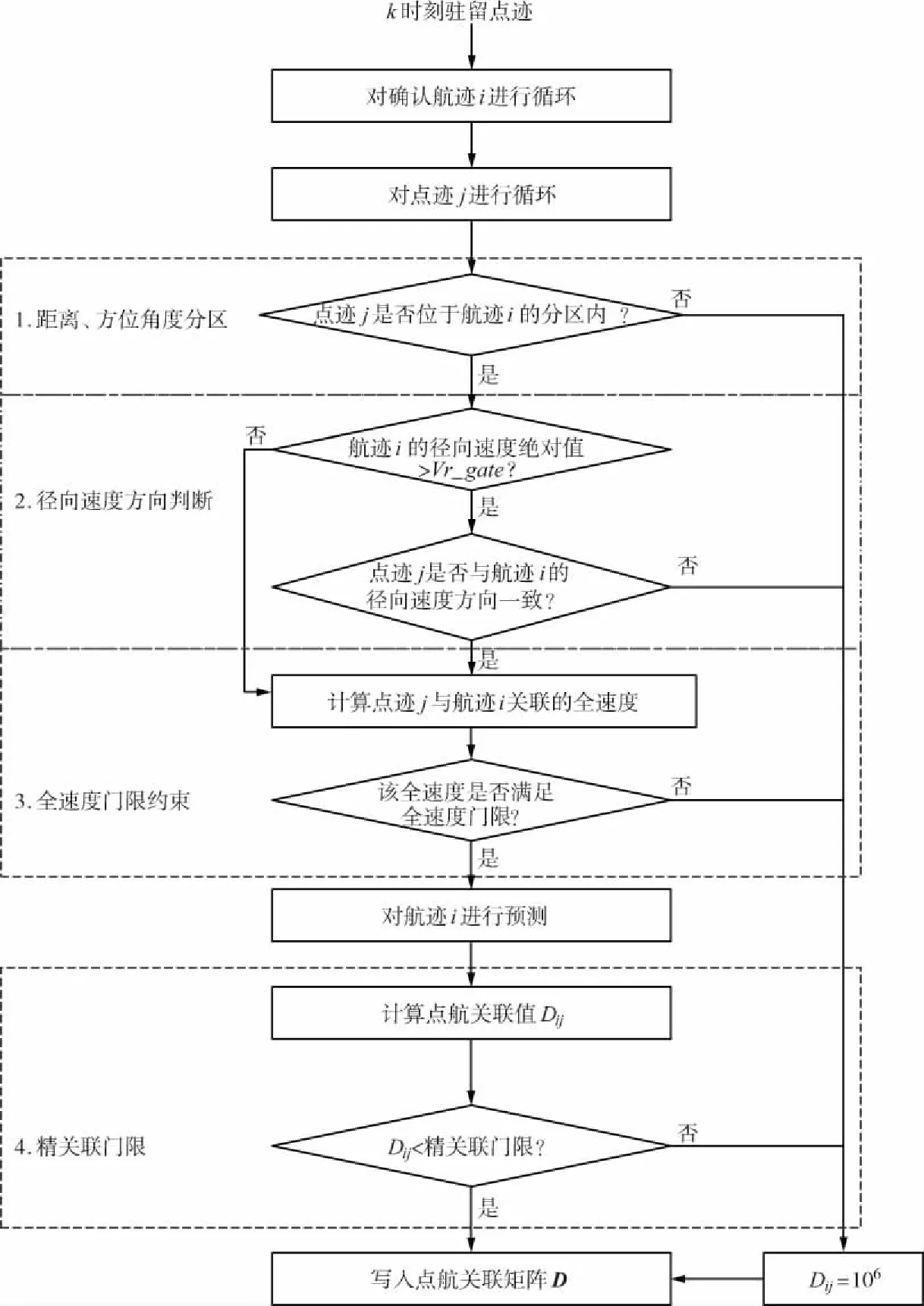
图2 确认航迹的点航关联过程
2 数据处理及结果分析
对雷达跟踪民航飞机实测的点迹数据进行处理,这些原始点迹数据不仅有飞机目标的回波点迹数据,同时还存在较多的地杂波、气象杂波点迹数据。采用上一节介绍的点迹滤除方法和流程对所有的点迹进行等级划分,并对杂波点迹进行滤除,同时评估滤除的效果。
2.1 在不进行帧间点迹滤除的显控点迹显示结果
为评估处理后的点迹滤除效果,首先给出不进行帧间点迹滤除的显控点迹显示效果。为突出显示,将真实目标的点迹用深灰点标识,杂波点用浅灰进行标识。截取的该段探测时间内总的点迹数为1 001个,其中大部分为杂波点迹,真实目标点迹329个,杂波点迹672个。
点迹滤除的最终目的就是要对这些红色点的进行辨识,确定其为杂波点迹或者等级低的点迹;同时确认黑色点为真实的目标点迹。送显控点迹如图3所示。
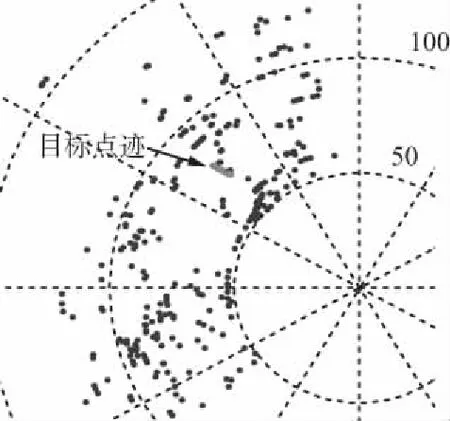
图3 送显控点迹(不做帧间杂波点迹滤除)
2.2 进行帧间点迹抑制的显控点迹显示结果
下面经关联门限采用上面提高的归一化RAE位置误差椭球关联门,同时对比分析了利用全速度门限进行辅助关联和不利用全速度门限进行辅助关联的效果对比。
2.2.1 门限设置1:采用归一化RAE位置误差椭球关联门
采用归一化RAE位置误差椭球关联门进行帧间杂波点迹滤除,得到结果如图4所示。此时显控选择显示等级1,2,3的点迹,滤除等级4点迹。其中绿色“+”符号代表等级3点迹,蓝色“*”符号代表等级2点迹,黑色实心圆点代表等级1点迹,下同。总显示点迹数据为356个,目标点迹(等级1点迹)329个,等级2点迹6个,等级3点迹21个。因此滤除的杂波点迹645个,杂波点迹正确滤除率为95.9%。
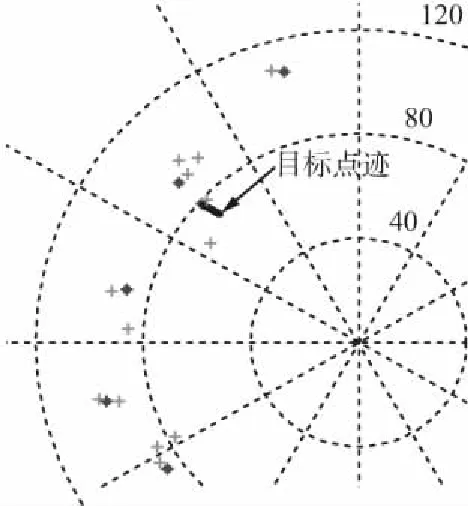
图4 送显控点迹(做帧间杂波点迹滤除后,门限设置1)
2.2.2 门限设置2:采用RAE位置误差椭球关联门限与全速度关联门限相结合
当采用RAE位置误差椭球关联门限与全速度关联门限相结合进行帧间相关处理,得到显控点迹滤除效果如图5所示。其中等级1点迹329个,等级2点迹1个,等级3点迹5个,杂波点迹正确滤除率为99.1%。可以看出,结合速度门限后可以提高杂波点迹的正确滤除率。

图5 送显控点迹(做帧间杂波点迹滤除后,门限设置2)
通过对以上雷达实测数据的分析结果对比可以看出,采用本文给出的算法结合对应的目标属性信息可以较好地进行杂波点迹滤除,同时保留完整的真实目标点迹信息。
3 结束语
本文给出了一种基于帧间相关处理的杂波点迹滤除方法,对该方法的处理流程、算法选取和门限参数的选取进行了详细说明。通过雷达实际试验数据分析结果可以看出,通过帧间的相关处理,可以抑制绝大部分的杂波点迹,同时对真实目标点迹可以完整地保留下来,经过杂波滤除后,点迹显示输出质量大幅度提高,空情空间态势显示效果更清楚明了。