一种基于特征加权的点迹质量评估方法及应用
2019-04-11赵三伟徐敏超孙玉玺
赵三伟 徐敏超 孙玉玺
(武汉滨湖电子有限责任公司 武汉 430205)
0 引言
一般而言,对于云雨、海浪、箔条等物体引起的无源干扰信号,可以通过设计自适应MTI滤波器进行抑制,但随着现代雷达分辨率和灵敏度的提高,发现由于云雨引起的气象杂波具有特殊的特征。通过大量实测数据分析发现,气象杂波一般分为两类:一类气象杂波面积比较大,运动速度缓慢,通过自适应MTI滤波器及恒虚警(CFAR)进行有效抑制后,该类杂波不能够形成稳定航迹,因此通过信号处理的方法能够对该类杂波信号进行剔除;另一类气象杂波则与之不同,其在雷达屏幕上成点状,通过上述的自适应MTI滤波器及恒虚警(CFAR)检测后能够形成稳定航迹[1],通过传统数据处理手段不能够对其进行有效判别。
对于上述问题,一种直观的思路是采用划取速度门限的方法来对上述气象目标进行剔除,但是由于该类杂波同典型低慢小目标(无人机、直升机等)的特征类似,该方法在剔除气象目标的同时会引起系统对低慢小目标的漏警。本文拟采取目标分类的思路在点迹维[2-3]对上述问题进行解决。
对检测视频进行点迹凝聚,给出点迹的距离和方位信息,同时获取点迹的距离展宽、方位展宽、凝聚点数和幅度等点迹特征;针对不同的点迹特征,剔除奇异特征值的点迹;根据点迹特征进行点迹质量评估,通过点迹质量门限对点迹进行判决。基于特征加权的点迹质量评估流程图如图1所示:

图1 点迹处理流程图
1 点迹凝聚与奇异点迹剔除
1.1 点迹凝聚
点迹凝聚处理的过程是,先进行距离上的凝聚,得到水平波瓣内不同方位上的距离值,因回波大小及量化误差等因素的影响,这时的距离值可能不在同一单元;再进行方位上的凝聚,计算时不要求距离位于同一单元[4-5]。
对于同一目标产生的在距离上连续或间隔一个量化单元的点迹,按公式(1)求取质心,然后将质心的数值作为相应目标点迹的距离估计值。
(1)
其中n为目标点迹的个数,Ri为第i个目标点迹的距离,Vi为第i个目标的回波幅度值。
对由同一目标产生的在方位上相邻的点迹按式(2)求取质心,将质心数值作为相应目标点迹的方位估计值。
(2)
其中n为目标点迹的个数,Ai为第i个目标点迹的方位,Vi为第i个目标的回波幅度值。
1.2 点迹特征选取与奇异点迹剔除
在点迹凝聚的过程中同时提取点迹的特征。点迹的特征众多,如凝聚点数、原始视频幅度、点迹环境信息(CFAR估值)、方位展宽、距离展宽、多普勒通道号等。在选取点迹特征时要尽量保证各特征之间的正交性。本文所需的点迹特征有距离展宽,方位展宽,凝聚点数和幅度凝聚点数比。
奇异点迹剔除是对上述获取的点迹特征值中不符合理论的奇异点迹进行剔除。
1)距离展宽
距离展宽为目标点迹最远距离单元与最近距离单元之差。目标与杂波的距离展宽特征分析如图2所示:

图2 目标与杂波距离展宽特征分析
由图2可知,目标的距离展宽略大于杂波的距离展宽。距离展宽特征与雷达的距离分辨率有关,当雷达距离分辨率越高时,目标和杂波的距离展宽特征差别越大。
根据最大目标RCS、雷达的距离分辨率和半脉压区目标展宽等因素,可以确定点迹距离展宽最大值;当距离展宽大于该值时,认为是奇异点迹。
2)方位展宽
方位展宽为目标点迹最大方位与最小方位之差,当目标跨正北方位时,需要求模计算。目标和杂波的方位展宽特征分析如图3所示:

图3 目标与杂波的方位展宽特征分析
由图3可知,目标的方位展宽多集中在4-11个脉冲,约占85%,杂波的方位展宽多集中于1-8个脉冲,约占90%。目标的方位展宽明显大于杂波的方位展宽。
根据天线波束宽度和雷达脉冲积累个数可以计算出方位展宽的最大值,当方位展宽大于该值时,认为是奇异点迹。
3)凝聚点数
凝聚点数为目标点迹凝聚的检测点个数。目标与杂波的凝聚点数分布如图4所示,点迹百分比对比如图5所示:

图4 目标与杂波凝聚点数特征分布
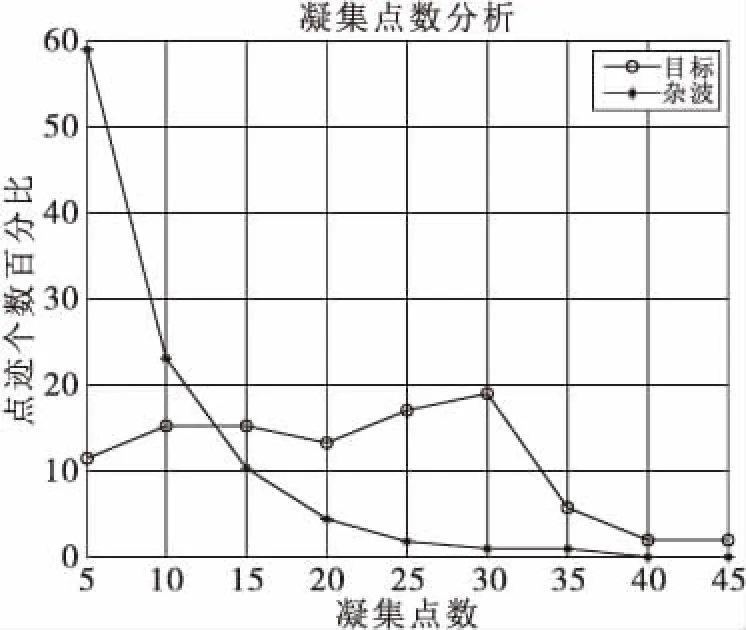
图5 目标与杂波凝聚点数特征分析
由图4,图5可知,杂波的凝聚点数偏少,小于15点的约占90%;目标凝聚点数分布均匀,但基本小于45点。
组成点迹的凝聚点数过小时,认为该点迹为虚假点迹。
4)幅度凝聚点数比
点迹幅度为目标点迹中幅度最大的检测点的幅度。幅度凝聚点数比分布如图6所示,点迹百分比对比如图7所示:

图6 目标与杂波幅度凝聚点数比分布

图7 目标与杂波幅度凝聚点数比特征分析
由图6,图7可知,目标的幅度凝聚点数比较小,比值小于15的约占95%;杂波的幅度凝聚点数比较大,分布均匀,但比值基本都小于45。
当目标信噪比越大时,组成点迹的脉冲数越大,当信噪比越小时,组成点迹的脉冲数据越小。当信噪比与组成点迹脉冲数过大或过小时,认为虚假目标。
2 基于特征加权的点迹质量评估
2.1 点迹特征质量
点迹特征质量表示点迹的某个特征的可信度评估值。第i个点迹特征的质量计算公式如式(3)所示:
(3)

根据(3)式可知,点迹特征的质量表示点迹的该特征距该特征超平面的距离,距离越近,点迹质量值越小,点迹的可信度越高。
2.2 点迹特征权值
点迹特征权值为点迹的各个特征质量在整个点迹质量中所占的比重。第i个点迹特征权值计算公式如式(4)所示:
(4)
根据式(4)可知,点迹特征权值表示目标的该点迹超平面与杂波的该点迹超平面的距离占整个该点迹特征宽度的比例。
2.3 基于特征加权的点迹质量
基于特征加权的点迹质量是对所有点迹评估质量加权所得,计算公式如式(5)所示:
(5)
其中Q为基于特征加权的点迹质量,ωi为第i的点迹特征的权重;Qi为第i个点迹特征的质量。
根据式(5)可知,基于特征加权的点迹质量在0~1之间,越接近1,其点迹的可信度越高,点迹质量越接近0,其可信度越低。
3 应用验证
利用某地面预警雷达在沿海采集的实测数据对上述方法进行验证。由于海面环境复杂,海面气象变化无常,常规的点迹处理方式对点状杂波抑制效果很差,目标在穿越杂波区时跟踪不连续。
利用采集数据作为样本,统计2.2节中提出的点迹特征均值和上下界值如表1所示:
表1 样本特征

样本特征目标特征均值杂波特征均值点迹特征上界点迹特征下界凝聚点数18.585.49452距离展宽2.111.0491方位展宽(CPI数)6.572.04161幅度脉冲数比6.4327.31800.8
根据式(4)中点迹特征权值的计算方法,利用采集数据作为样本,统计各特征所占权重如表2所示:
表2 特征权重
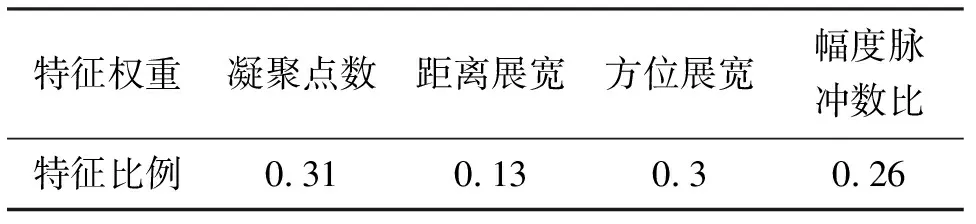
特征权重凝聚点数距离展宽方位展宽幅度脉冲数比特征比例0.310.130.30.26
根据式(3)中Qi的计算公式计算点迹的凝聚点数、距离展宽、方位展宽和幅度凝聚点数比等目标和杂波特征质量估值;根据式(5)中Q的计算公式将上述特征质量估值加权求和,可得点迹的目标质量估值Q目标和杂波质量估值Q杂波。
当Q杂波-Q目标>gate时,判断该点迹为杂波,否则,判断该点迹为目标。gate为点迹质量评估判断门限,可手动调节。
利用某雷达采集数据对基于特征加权的点迹质量评估方法进行仿真,点迹质量评估判断门限gate选择为0.2,将70圈扫描数据点迹进行显示,点迹质量评估前后的点迹个数对比如图8所示,点迹质量评估前如图9所示,点迹质量评估后如图10所示:

图8 点迹个数对比

图9 点迹质量评估判断前点迹图
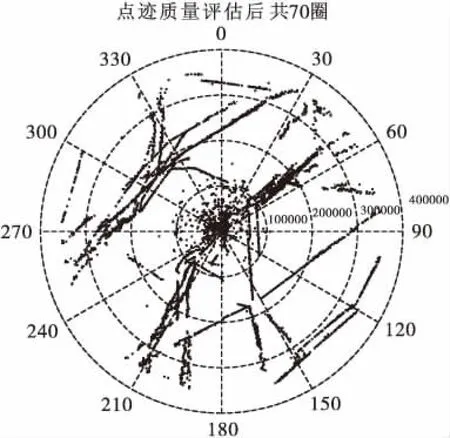
图10 点迹质量评估判断前点迹图
由图8可知,奇异点迹剔除之前每一圈的点迹数约为140,奇异点迹剔除之后点迹数约为100,经点迹质量评估滤除后,点迹数约为80。经过两级点迹滤波后,杂波点迹得到有效抑制。对比图8和图9可知,基于特征加权的点迹质量评估方法对点状杂波有明显的抑制作用,且目标点迹无明显变化。
4 结束语
本文提出的基于特征加权的点迹质量评估方法经实测雷达数据验证可以有效地抑制点状杂波。由于大多雷达的点迹处理流程基本相同,所以该方法可推广到其他雷达上应用。其中点迹特征的选取可根据不同雷达的特性选取不同的特征,如三坐标雷达可以选取高度特征,点迹特征的均值、上下界和权重也需要根据不同雷达的目标属性进行计算。
