二维PSD的非线性畸变校正算法
2019-01-09王静仪王兴东仄士春
王静仪,王兴东,刘 钊,曾 镛,仄士春
(1.武汉科技大学冶金装备及其控制教育部重点实验室,湖北 武汉,430081;2.扬州力德工程技术有限公司,江苏 扬州,225131)
随着制造业的高速发展,自动化焊接在实际工程中的应用越来越广泛,并已成为先进制造技术的重要组成部分。焊缝自动跟踪是焊接自动化的关键技术环节之一,对保证焊缝质量、改善劳动条件、提高生产率有重要的作用。焊缝跟踪系统一般由视觉传感器、控制系统和执行机构三部分组成,其中视觉传感器对整个系统的跟踪精度至关重要。位置敏感探测器 (position sensitive detector, PSD)是一种先进的光电位置传感器,因其分辨率高、响应速度快等优点而被应用于焊缝跟踪[1-2],但PSD存在的非线性畸变问题会降低焊缝跟踪系统的数据置信度。
为了上述问题,研究人员提出了各种校正方法。袁红星等[3]运用双一次插值及双二次插值算法对PSD的非线性进行补偿,但其精度还有待提高。管炳良等[4]提出了适用于非均匀网格的二维PSD离散标定误差修正方法,经补偿后在PSD中心1 mm范围内示值误差小于2 μm。张风齐等[5]使用双调和样条插值算法来校正PSD产生畸变的离散点,仿真分析显示,校正后在PSD整个感光面上的均方误差不超过2.29 μm。Cui等[6]提出两个线性度指数用于评估二维位置测量精度,并设计了新的估计公式以消除PSD非线性畸变的影响。
本文以二维PSD在焊缝跟踪系统应用中产生的非线性畸变为研究对象,首先对图像缩放算法中应用较多的双三次插值法进行介绍,然后针对PSD在离散标定中出现的非均匀网格提出双三次插值改进算法,最后通过仿真和实验来验证改进算法对于二维PSD非线性畸变校正的有效性以及在实际焊缝跟踪系统中的适用性。
1 二维PSD工作原理
PSD的工作原理是基于半导体的横向光电效应,分为一维和二维两大类,二维PSD可以测量光斑在平面上的运动位置。二维PSD的光敏面常为正方形,有两对电极,其结构原理如图1所示,其中阴影部分为二维PSD的有效工作区域。
当入射光点位置与各电极距离不同时,4个电极收集的电流强度也不相同,并且与光点在光敏面上的位置相对应。光斑中心点的坐标(x,y)可根据下式求得[7]:
(1)
式中:X1、X2、Y1、Y2为每一电极的输出信号(光电流);L为相邻电极间的距离。
2 PSD非线性畸变校正
制作PSD所用硅片材料的非均匀性往往呈现出一种缓慢的梯度变化。若将整个PSD光敏面上的位置误差函数E(x,y)离散化,得到一系列网格点阵上的误差函数值,对于非网格点上的误差,则可用插值、神经网络等方法进行函数逼近,这样便可得到待校正点的逼近值。
2.1 双三次插值算法
双三次插值是三次插值在二维空间上的一种扩展[8]。为了减少计算复杂度,双三次插值过程被分解为水平和垂直两个一维插值,如图2所示。

图2 双三次插值示意图Fig.2 Schematic diagram of bicubic interpolation
首先进行水平插值,根据待校正点P(x,y)周围4×4点阵的坐标及与待校正点的距离插值,得到4个虚拟点P1、P2、P3、P4;再由这4个虚拟点与待校正点进行垂直插值,得到校正后的点P:
(2)
式中:C1、C2、C3、C4为水平插值系数;H1、H2、H3、H4为垂直插值系数。
针对二维PSD非线性畸变校正,根据式(2)可以整理得出插值函数φ(xp,yq):
(3)
则点P(x,y)在X、Y方向上的畸变值为:
(4)
式中:EX(xp,yq)和EY(xp,yq)分别为网格顶点(xp,yq)在X、Y方向上的畸变值。
2.2 改进的双三次插值算法
理论上,前述4×4点阵网格是均匀的,以图3中的待校正点P(x,y)为例,按照双三次插值的思想,由式(3)可知,插值函数φ(xp,yq)代表了P(x,y)周围的点对它的补偿,函数值是通过网格中16个点的坐标进行计算的。在均匀点阵中,这16个点的坐标可以由点A1、A2、A3、A4的横坐标和点A1、A5、A9、A13的纵坐标来表示,在计算网格中的任意一点对点P(x,y)的补偿分量时,其实是利用了图3中椭圆圈内7个点的坐标信息。

图3 改进的双三次插值示意图
Fig.3Schematicdiagramofimprovedbicubicinterpolation
然而实际上,PSD自身存在的非线性畸变导致所标定的网格是不等间距的。假如需要求点A7对点P(x,y)的补偿值,根据双三次插值算法,点A7的插值函数φ(xi+2,yj+1)仅与椭圆圈内的点有关。而在非均匀网格中,点A7的横、纵坐标与点A3的横坐标及点A5的纵坐标不相等,因此得到的插值函数φ(xi+2,yj+1)并不准确,无法体现出点A7对点P(x,y)的补偿分量,所以不能笼统地用椭圆圈内的7个点对待校正点的补偿来代替该点所在网格对它的补偿。
下面对双三次插值算法进行改进,仍以点A7为例进行说明。A7对待校正点P(x,y)的补偿分量应该与两点之间的距离相关,即距离越近补偿分量越大。将网格中与A7位于同一行或同一列的7个点(A3,A5,A6,A7,A8,A11,A15)的坐标值代入式(3)中得到插值函数φ(xi+2,yj+1),这样就反映了A7点对P(x,y)的补偿分量,也反映了两点之间的距离关系。其他点对P(x,y)的补偿分量同样按照上述方法得到,此处不赘述。最后通过式(4)即可得出点P(x,y)最终的校正值。
基于改进双三次插值的PSD非线性畸变校正算法流程如下:
(1)在PSD光敏面上得到均匀点阵Ai,并计算出点阵中每个点在X、Y方向的畸变值;
(2)找到某待校正点P(x,y)在Ai中所处4×4网格;
(3)得到网格中每个顶点所在行和列的7个点的坐标,代入式(3),求得插值函数φ(xp,yq);
(4)将φ(xp,yq)和该顶点的畸变值代入式(4),得出待校正点P(x,y)在X、Y方向上的畸变值EX(x,y)和EY(x,y);
(5)EX(x,y)和EY(x,y)分别加上点P(x,y)的横、纵坐标即为校正后的P点坐标。
3 算法验证
3.1 仿真
仿真采用的数据由PSD的畸变模型[9]得到:
(5)
式中:I1~I4为4个电极输出的电流;I0为光生电流;X、Y分别为光点的理论横、纵坐标;l为PSD光敏面的边长,这里取单位长度1。
根据式(5)以及二维PSD的位置计算公式(1),产生9×9的样本点集(见图4),得到每个点的实际坐标和测量坐标。分别用双一次插值[3]、双二次插值[3]、改进的双二次插值[4]、双三次插值以及本文提出的改进双三次插值算法对图4所示非线性畸变进行校正,计算出各个算法的误差均差和方差,如表1所示。

图4 样本点集Fig.4 Sample points
表1各算法的校正误差对比
Table1Comparisonofcorrectionerrorsbydifferentalgorithms
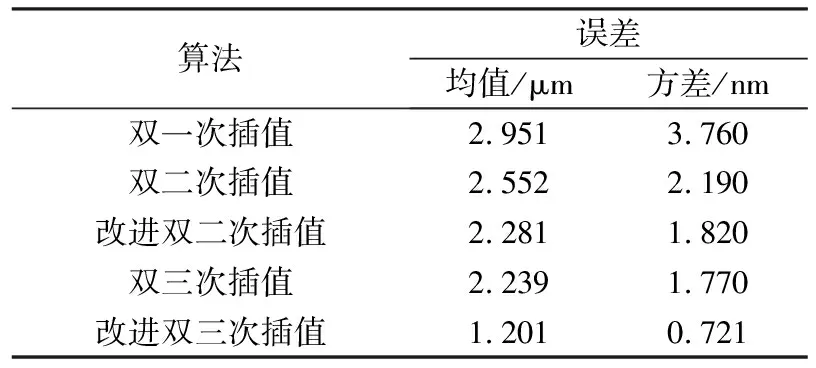
算法误差均值/μm方差/nm双一次插值2.9513.760双二次插值2.5522.190改进双二次插值2.2811.820双三次插值2.2391.770改进双三次插值1.2010.721
由仿真结果可得,与其它4个算法相比,改进双三次插值算法的误差均差和方差都有明显降低,表明该算法能够很好地实现PSD的非线性畸变校正。
3.2 实验
实验装置如图5所示。选用深圳达瑞鑫光电科技有限公司生产的PSD-1515型位移传感器,其最大感光面积为15 mm×15 mm,分辨率为1 μm,光谱响应范围为380~1100 nm;点激光器的功率为50 mW、波长为650 nm;三轴精密位移平台的精度为1 μm。PSD的有效工作区域在光敏面中心8 mm×8 mm范围内,故本实验仅在此区域内进行畸变校正。

图5 实验装置Fig.5 Experimental apparatus
实验步骤如下:
(1)系统初始化。将PSD固定于三轴精密位移平台上,使点激光垂直照射于PSD的感光区域,调整激光器焦距,使光斑面积最小。
(2)获取误差函数。选择一定步长S0,由于PSD的原点存在偏移,故设计螺旋轨迹,控制精密位移平台,使激光点从原点开始分别沿PSD的X、Y方向移动,获得一系列网格点阵(xi,yi),根据式(6)可以得到每个顶点的误差值:
(6)
式中:xi、yi为理论坐标值;xi0、yi0为PSD测量值。
(3)激光点回到原点位置,重复步骤(1)进行初始化。
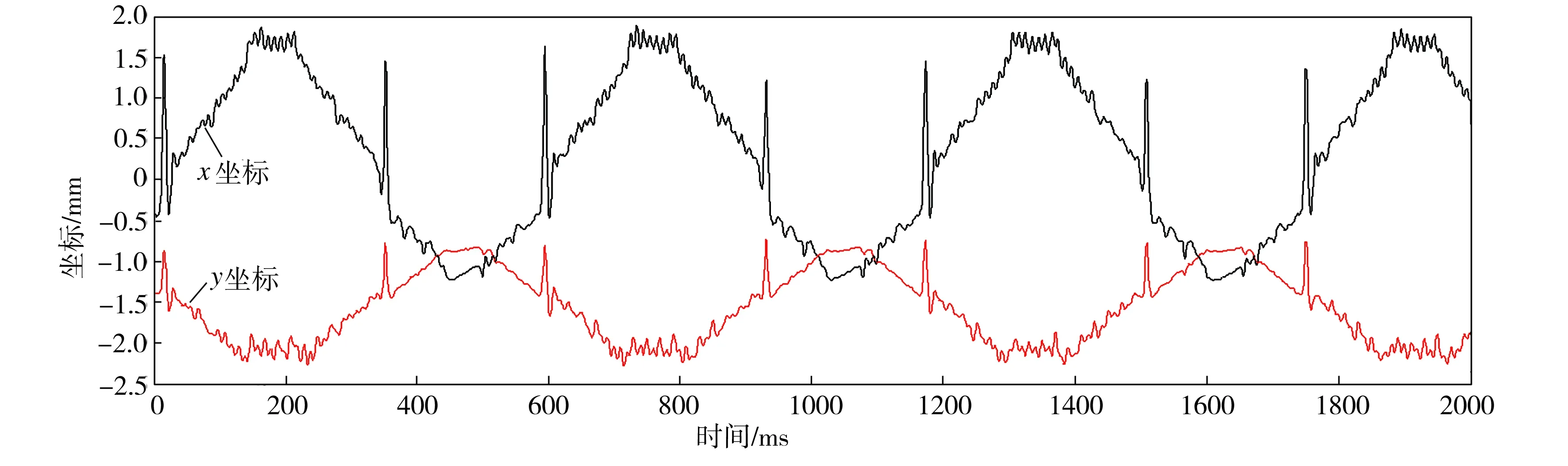
(4)修正待校正点。选择步长S1(S1 表2是本文算法对PSD非线性畸变的部分校正结果,其中,样本1~5是PSD光敏面中心1 mm×1 mm范围内(A区)的采样点,样本6~10是PSD光敏面中心1 mm×1 mm以外、8 mm×8 mm以内范围(B区)的采样点。由实验结果可知,对A区样本点的校正效果较好,全体样本的平均误差为4 μm;对B区样本点的平均校正误差为16 μm;越靠近PSD有效区域中心,误差越小。 表2 改进算法对PSD非线性畸变校正的部分实验结果Table 2 Partial experimental results of PSD nonlinear distortion corrected by the improved algorithm 上述实验是对静态光斑的采集与畸变校正,而在实际焊缝跟踪系统中,PSD采集的是动态变化的光斑。为了验证本文算法的实用性,采用点激光器在待焊板材上产生动态光斑,通过二维PSD进行跟踪。如图6所示坐标-时间曲线为系统采集的未经过校正的原始数据,其中x、y分别是动态光斑通过PSD示出的横、纵坐标。将原始数据通过改进的双三次插值算法进行校正,校正前后的数据与理论值的误差分布如图7所示,经过计算得出原始数据的误差均值为37.5μm,校正后的误差均值为6.2 μm。由此可见,改进的双三次插值算法可以应用于焊缝跟踪系统中的PSD非线性畸变校正。 图6 校正前的焊缝数据Fig.6 Weld seam data before correction 图7 校正前后的误差分布Fig.7 Error distributions before and after correction 本文在分析双三次插值算法原理的基础上,提出了适用于PSD非线性畸变校正的改进双三次插值算法,然后通过仿真和实验进行算法验证。采用改进算法对PSD非线性畸变的仿真样本数据集进行校正后,在PSD全感光面上的误差均值为1.2 μm,与其它4种经典插值算法相比有明显优势。实验结果显示,经过本文算法校正,PSD光敏面中心1 mm×1 mm范围内的非线性畸变误差平均值为4 μm,1 mm×1 mm以外、8 mm×8 mm以内范围的误差平均值为16 μm。该算法对于PSD采集的动态光斑也取得了比较好的校正效果,可实际应用于焊缝跟踪系统。


4 结语
