基于运动链闭合法的可控码垛机器人的构型综合研究
2018-12-24唐俊杰晏紫琦
唐俊杰,晏紫琦
(广西大学机械工程学院,广西 南宁530004)
0 引言
伴随着工业生产水平的提高和机电一体化的进步,各式各样的机器人被广泛运用于生产领域,用以提升生产效率、解放劳动力以及改善生产环境,码垛机器人就是其杰出代表。现阶段,串联式码垛机器人以其运动灵活、工作空间大等优点,被广泛应用于生产实践中。但是,采用串联结构的机器人承载能力有限,工作过程中会加大关节误差,且安装驱动设备在关节上会加大转动惯量和残余振动,使得整体动态性能不佳,严重影响着生产效率[1]。因此本文提出一种新型的码垛机器人,在保证正常工作的同时,提升承载能力和工作精度。
1 码垛机器人自由度分析
传统码垛机器人的示意图如图1所示。该机器人采用串联式设计,分别在机架、动臂关节处安装电机用以控制末端位姿;在末端抓手处设置电机用以精准控制装卸物品,因此机构驱动数和保证机器人完成既定工作的自由度数均为4.现代化码垛机器人要求抓手活动范围较大、工作空间较为固定、连续负载能力高以及速度、加速度、运动的灵活性要求较高。基于以上特点,考虑将码垛机器人设计为自由度为4的并联式机器人。

图1 传统码垛机器人示意图
2 新型码垛机器人构型综合研究
2.1 构型设计要求
(1)根据工作原理及工况要求,为提高末端执行器承载能力和工作稳定性,该机构应设计为闭环式。
(2)根据工程实际要求,若将电机安装在驱动关节则加大转动惯量,故尽量将驱动件安装在机架上或降低驱动元件的水平高度。
(3)为保证机构的可靠性,且降低制造、装配难度以及能量损耗,拟采用低副连接。
(4)在满足工作要求的前提下,为降低加工成本和结构复杂度,构件数目应尽量减少。
2.2 杆件类配方案
将机架的约束解除后,转换成运动链形式,从运动链结构形式上看,任意运动链均可离散分解为二副杆、三副杆以及多副杆闭合组成整体机构[2-3]。
记全转动副平面机构的运动链的杆数为N,运动低副数为P,则由运动链构成机构的自由度数F为:

根据欧拉公式可求得运动链闭环数L为:

设机构的总杆数为N,其中i副杆的数目为ni,则有:

记类配方案n=(n1/n2/n3/n4)
为保证码垛机器人能完成一定精度工作,且降低整体加工成本以及结构复杂度,选取杆件数目不宜过多,本文对主构型进行分析,为保证工作能力,故选取7杆8副和9杆11副两种情况进行研究。
2.3 运动链闭合法
运动副是指两构件直接接触,产生相互运动的活动联接。本文所研究的运动副均为低副,当一个构件与其他构件未相连时,该构件所带的运动副元素不完整,记为开放副,用记号“。”表示;两构件相连形成完整的运动副称为运动副闭合的过程,用记号“。”表示。此外,为保证机构的可靠性,且降低制造、装配难度以及能量损耗,在主构型中只考虑低副连接,在工程实际中,为保证为提高执行器承载能力和工作稳定性,需将机构设计为闭环结构,则所有的开放运动副均需要闭合,且同一多副杆上开放运动副均视为等效。
2.4 九杆十一副的构型综合
对于F=2的平面闭环机构运动链,运动链中杆数N,运动副数为P和闭环数L的关系如表1所示。
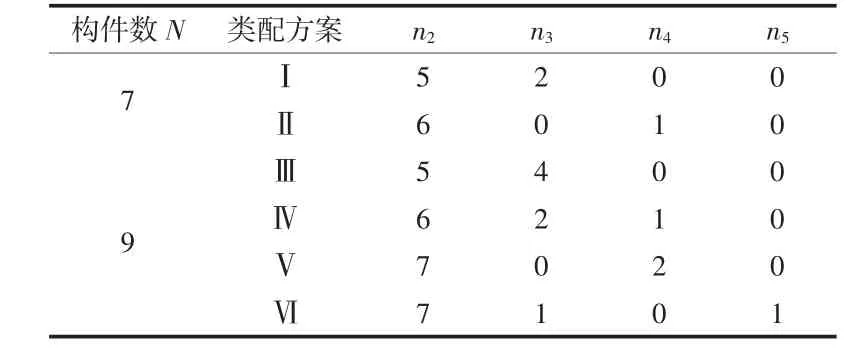
表1 自由度F=2的平面闭环机构杆数、运动副数
在设计过程中,为保证机构运动的稳定性,需使二副杆开放副总数E2和多副杆开放副总数∑Ei相等。如若不相等,需将多余的开放副先行闭合以减少开放副数目,保证二者相等后再一一闭合成为完整运动链。
现以9杆机构,类配方案Ⅵ为例进行分析,此时杆件如图2所示。

图2 连杆类配方案Ⅵ对应的杆件分布
其中开放副E2=14,E3=3,E5=5,经计算得:E2-E3-E5=6考虑将二副杆两两闭合以减少6个开放运动副,再与多副杆相连形成封闭的运动链。闭合后二副杆中含有杆件的数目如表2所示。
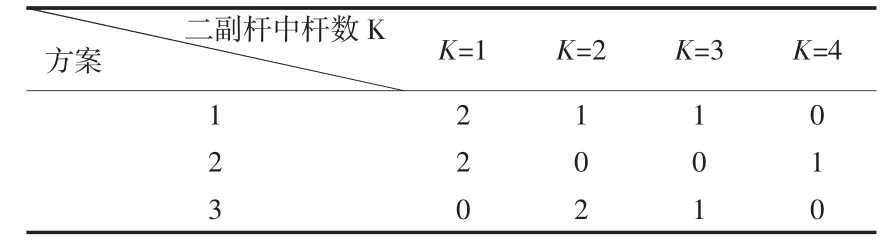
表2 闭合后的二副杆含有的杆件数目
当k1=2,k2=1,k3=1时,将闭合过程如图3所示。
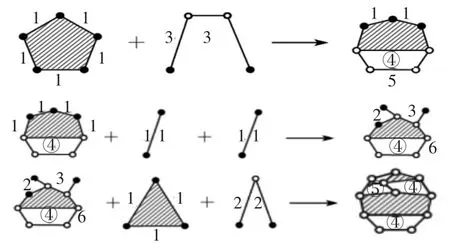
图3 运动链闭合过程
其中④、⑤为闭环机构中的回路数,以此类推,可以根据运动链闭合的原理得到如下运动链图谱。见图4.
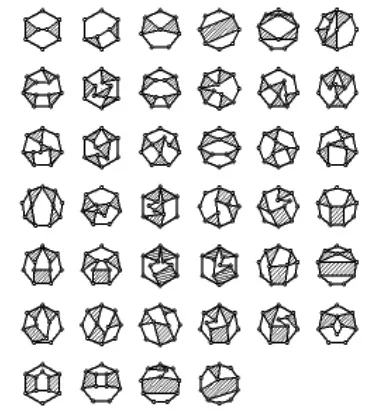
图4 平面二自由度闭环机构运动链图谱
2.5 新型码垛机器人主构型筛选
现对码垛机器人的主构型分析,即考虑机架、大臂、小臂以及主动杆之间的连接方式,暂不考虑末端执行器及平衡杆的设计,则从以下几个方面筛选较好的构型。
(1)机架存在条件
码垛机器人对承载能力和工作精度有较高的要求。为减小机构转动惯量,保证动态性能,优先考虑将驱动安装在机架上[4],此时机架需同时与主动杆、动臂连接,故机架所含的运动副i≥3,则机架的至少是三副杆。
(2)大臂、小臂存在条件
码垛机器人的主构型需要依次串联机架、大臂、小臂,机架和大臂、大臂和小臂之间铰接,且两个驱动需分别与大臂小臂相连用以调整末端位姿。则大臂需含有3个运动副,由于主构型未对末端执行器进行考虑,则忽视小臂与其铰接的运动副,结合机架存在条件,表现为至少有两个多副杆串联。
(3)主动杆存在条件
安装在机架上主动杆作为驱动时,为保证运动的确定性,运动链中两主动杆构成的任意回路机构,自由度均需等于2.
(4)运动链最简原则
为降低码垛机器人的制造成本,码垛机器人主构型中应排除自由度为零的基本杆组构成的支链,在可完成工作要求的前提下,优先考虑使用杆件较少的运动链作为主构型。
根据以上条件,Ⅰ方案中第三种构型满足最简原则,且大臂与机架直接相连,两个主动杆分别与机架和大臂、机架和小臂相连,满足要求,根据运动链图绘制的机构简图如图5所示。

图5 运动链图I-3对应的结构简图
2.6 新型可控码垛机器人的结构改进
(1)由上文得到的码垛机器人主构型,首先要在小臂末端铰接末端平动保持架,根据码垛机器人的工作要求,末端抓手需保持水平姿态,表现在构型上,则需要另添加两根平衡杆和一个三脚架,以形成两个平行四边形结构实现末端水平。
(2)驱动大臂、小臂转动的主动杆虽运动灵活,但运动过程中易达到奇异位置,导致速度、加速度出现跳跃,不满足精度要求。而电动推缸具有可控性强、传动效率高、控制精度高等优点,可提升转动支链的可靠性,故选用电动推缸代替主动杆。
(3)由于机架上需要安装大臂、两个电动推缸以及平衡杆,占用较大的空间,从而影响工作范围,故将控制小臂转动的电动推缸安装在大臂上,且通过力学知识,调整铰接位置。
故改进后的结构简图如图6所示。
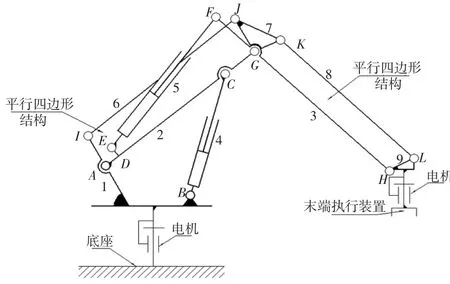
图6 码垛机器人结构简图
3 码垛机器人构型检验
3.1 自由度检验
基于螺旋理论对码垛机器人建立旋量系[5],则n=9,g=15,d=6- λ =3计算可得:
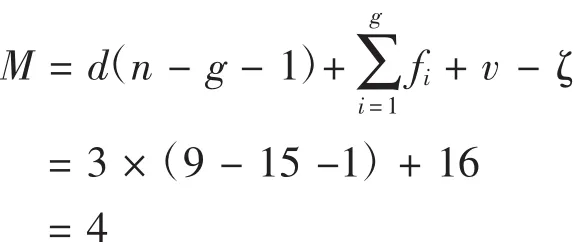
则该设计满足自由度要求。
3.2 工作流程检验
建立码垛机器人机构个环路模块示意图如图7所示。
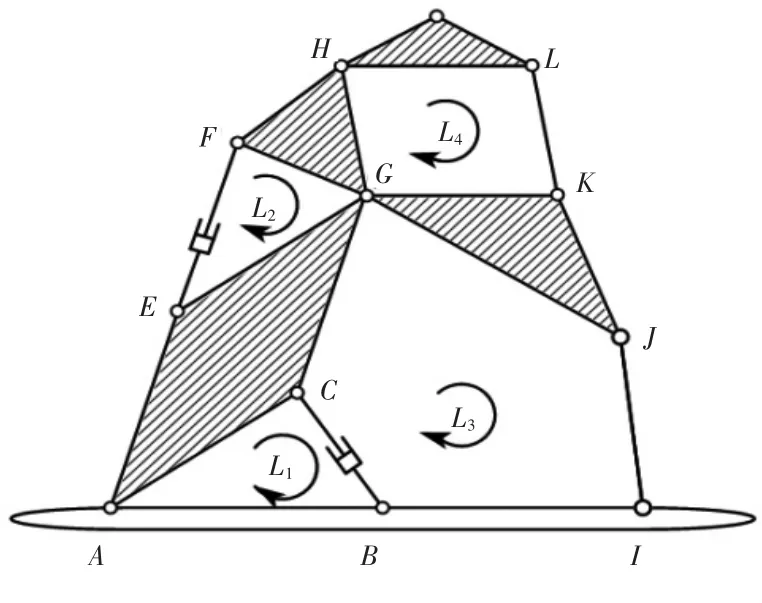
图7 码垛机器人环路模块图
该码垛机器人由四个相互联系的基本环路模块组成,其中大臂升降模块和小臂调整模块均可等效为包含电动推缸的四连杆机构,设计为平行四边形结构用以增加机构稳定性和保证末端水平。通过控制电动推缸1的长度,可推导大臂与水平面的夹角,末端执行器受两组电动推缸的耦合控制,可根据电动推缸2的变化以及各杆长度求得末端位姿,则设计较为合理。
4 结束语
本文首先对传统码垛机器人进行分析,确定其工作所需的自由度,然后根据运动链型综合的理论对杆件进行类配综合,进而得到主构型的所有构件组合方案,再添加限制,以满足工作要求,降低转动惯量和降低制造成本为目的,对所得的构件组合进行优选得到的主构型。在主构型的基础上添加平衡杆和末端执行器,得到所设计的可控码垛机器人,最后对所设计的构型进行检验,验证了设计的合理性。