基于改进虚拟磁链的储能变流器直接功率控制*
2018-11-13栾新宇刘晓卫边岗莹
栾新宇,樊 波,张 瑞,刘晓卫,边岗莹
(1.空军工程大学防空反导学院,西安 710051;2.解放军94943部队,福州 350026)
0 引言
随着电力电子技术的不断发展,电力电子变流器被广泛应用于变速驱动、不间断电源、光伏电池及电池储能系统[1-2]中,变流器的控制目标是维持直流侧电压恒定,使谐波电流含量尽量小,且功率因数接近1[3]。变流器控制策略越来越成为工业界和学术界的研究热点。
PWM变流器传统直接功率控制(Direct Power Control,DPC)分为开关表结构[4-5]和空间矢量调制(Space Vector Modulation,SVM)结构[6-7]。开关表结构的显著优点是结构简单,动态性能好,但存在开关频率变化、控制精度依赖滞环宽度、采样频率要求高等缺点。DPC的空间矢量调制(DPC-SVM)是针对开关表DPC频率不固定问题而提出的一种定频调制方式,其动态性会受到影响。本文针对上述缺点,提出一种基于改进虚拟磁链的储能变流器直接功率控制方法,引入空间矢量调制(VSM)模块取代开关表,通过SVPWM算法构建VFO-DPC系统,搭建了一个开关频率固定的VFO-DPC-SVM控制系统。实验结果表明储能变流器具有良好的输入特性,可以实现无静差调节,输出直流电压基本保持不变,系统性能得到提高。
1 基于虚拟磁链直接功率控制
1.1 瞬时功率理论
三相电路瞬时功率理论于1983年由日本学者Akagi.H[8]首次提出,该理论突破了传统功率定义的局限,系统地阐述了瞬时功率量的定义,使它不仅适用于正弦波,也适用于非正弦波和其他非周期过程。设三相电路中,各相的瞬时电压、电流矢量分别为和,则根据瞬时功率量p和q的定义可知:

1.2 基于虚拟磁链定向矢量控制
基于虚拟磁链定向的矢量控制是在基于电网电压定向的矢量控制(Voltage Oriented Control,VOC)基础上发展起来的[9-10]。由三相电压型PWM整流器的主电路拓扑结构可知,其网侧部分与三相交流电机的定子电路具有很大的相似性,网侧相电压相当于交流电机定子绕组的感应电势;储能滤波电感和等效电阻则相当于电机绕组的漏感和阻尼。因此,可以类比于交流电机磁链观测的方法,通过对电网矢量电压积分得到虚拟气隙磁链,VFOC的矢量关系图如图1所示。

图1 VFOC矢量关系图
以两相旋转坐标系的d轴为参考方向,使虚拟磁链ψ与d轴重合,虚拟气隙磁链滞后电网相电压π/2的角度,θ为需要观测的磁链角度。由虚拟磁链的定义可知,ψ在两相静止αβ坐标系下的表达式为:
其中,usα、usβ为两相静止 αβ 坐标系中网侧交流电压的 α、β 轴分量;ψsα、ψsβ为两相静止 αβ坐标系中虚拟磁链矢量的α、β轴分量。
在实际工程应用中,网侧线路电阻R通常很小,忽略阻尼压降后可得:

式中,Us为三相电网相电压矢量;UL为储能滤波电感的压降矢量;Ur为整流桥输入电压。
对上式两边分别积分,得出虚拟磁链关系式:

式(4)在两相静止αβ坐标系下的电压方程可以表示为:
式中,L 为储能滤波电感,iα、iβ分别为两相静止 αβ坐标系中网侧交流电流的分量;usα、usβ为整流桥输入端电压α、β分量。
将三相VSR各相中上下桥臂的IGBT视为理想的开关器件,采用开关函数描述整流桥各相的通断状态,则式(5)中变流器交流侧电压可以表示为:

其中,开关状态分量Sα、Sβ计算式为:
式中,Sk(k=a,b,c)为开关函数,定义为:当Sk=1时,k相上桥臂导通;当Sk=0时,k相下桥臂导通。
联立式(2)、式(5)、式(6),整理可得:
由式(8)可知,当直流母线电压udc(为降低交流输入的谐波含量,实现系统对交流电流的有效控制,通常)和所选择的空间矢量信息已知时,就可以对磁链进行估算,利用ψsα和ψsβ即可推出虚拟磁链矢量在两相静止αβ坐标系中的位置,从而完成定向,根据式(9)得到虚拟气隙磁链角度为:
1.3 基于虚拟磁链的瞬时功率估算
若虚拟磁链ψs已知,可得交流电压估算值如式(10)所示[11]:


根据复功率的定义,将式(12)的实部和虚部分离得到瞬时功率量p和q的计算式为:
当交流电网三相平衡时,虚拟磁链矢量幅值大小是保持不变的,因此,对其求导值为零,故式(13)中的含ψs的微分项可以忽略,得到理想条件下瞬时功率量表达式:
2 改进虚拟磁链观测器设计
虚拟磁链的定义式(2)中含有积分项,不可避免会带来积分初值选取问题,积分对象的初值不准确会导致不同程度的直流漂移问题,估算得出的磁链圆轨迹圆心将不在坐标原点[12-13]。纯积分器是无法消除直流分量的,如果以直流偏置为圆心的磁链轨迹进行定向,则会影响电压空间矢量选择和扇区判断的准确性,使得瞬时功率的计算精度大大降低,造成三相PWM整流器启动过程中冲击电流过大、性能严重恶化。
工程中常采用一阶惯性环节来代替纯积分器以滤除稳态时虚拟磁链观测器的纯积分作用带来的直流偏置,其效果等同于纯积分环节后接一个一阶高通滤波器,结构原理如图2所示。

图2 一阶惯性环节代替存积分器
一阶惯性环节虽然可以实现积分操作,降低直流偏置的影响,但由于初始值未知,一阶高通滤波器对直流分量的滤出需要一段时间才能完成,导致系统的动态性能变差。
针对以上不足,本文利用带饱和限幅反馈环节的积分器对磁链观测器进行改进,结构如图3所示。
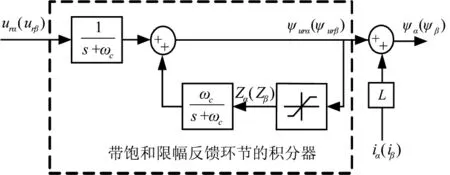
图3 改进虚拟磁链观测器
以α轴分量为例,带饱和限幅反馈环节的积分器的输出为:

当 ψurα小于限幅值 ψmax时,Zα=ψurα,式(15)整理得:
人像蚕一样拼命织关系的网,但织成之后,却又千方百计逃之夭夭。范坚强给了一杭一个逃离的机会,可以放下一切,每日枕着书香入眠。一杭成为这间石屋实质上的主人以后,范坚强给他送来了书,让他在漫长的白天与黑夜,不至于孤独。但单纯的生活结束了,石屋的门终于打开来。

很明显,此时改进积分器的作用效果与纯积分环节相同。反之,当ψurα大于限幅值ψmax时,Zα=ψurα,则有

若将积分器的积分初值固定为零,由于网侧交流电压初始相位未知、采样电路存在中点电压漂移等情况,纯积分环节的积分结果必然会出现直流分量误差。在改进的虚拟磁链观测器中,如果积分结果出现直流偏置,会导致积分输出值溢出ψmax,此时带饱和限幅反馈环节开始发挥作用,将输出结果限定在限幅值内,保证 ψurα和ψurβ小于或等于 ψmax;当输入变量的极性与原来相反,改进积分器则退出饱和,积分输出又恢复纯积分的效果,一旦积分结果达到幅值,此时积分器输出结果已经正确。由式(15)可见,带饱和限幅反馈环节的积分器通过强制将积分值限定在实际磁链幅值范围之内从而消除直流偏移。
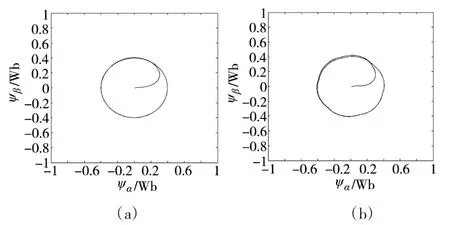
图4 虚拟电网磁链圆
图4(a)、图4(b)分别为带饱和限幅反馈环节和带一阶低通滤波器的虚拟磁链仿真结果,实验结果表明,在相同条件下,稳态运行时改进积分器的磁链轨迹和带一阶低通滤波器的磁链观测结果基本相似,但带饱和限幅反馈环节的积分器的磁链圆的波动更小。
3 VFO-DPC-SVM控制系统设计
VFO-DPC-SVM控制系统的结构原理图如图5所示,它兼具虚拟磁链技术和固定频率SVM调制方法的优势,是一种更为理想的直接功率控制方法。VFO-DPC-SVM控制系统与传统直接功率控制最大的不同就是取消了交流电压传感器,而原来的电压矢量鉴相器也被虚拟磁链估算环节和虚拟磁链鉴相器所代替。
在开关表直接功率控制中,VFO-DPC开关频率不固定,输入滤波器设计的难度增大,同时,DPC控制系统在工作过程中要取得良好的控制效果,需要提供更高的采样频率,这就对控制器和采样电路提出了更高的要求。通过对控制系统的改造,将DPC控制与SVPWM技术相结合,把开关表替换成空间矢量调制器就可以消除上述不足。
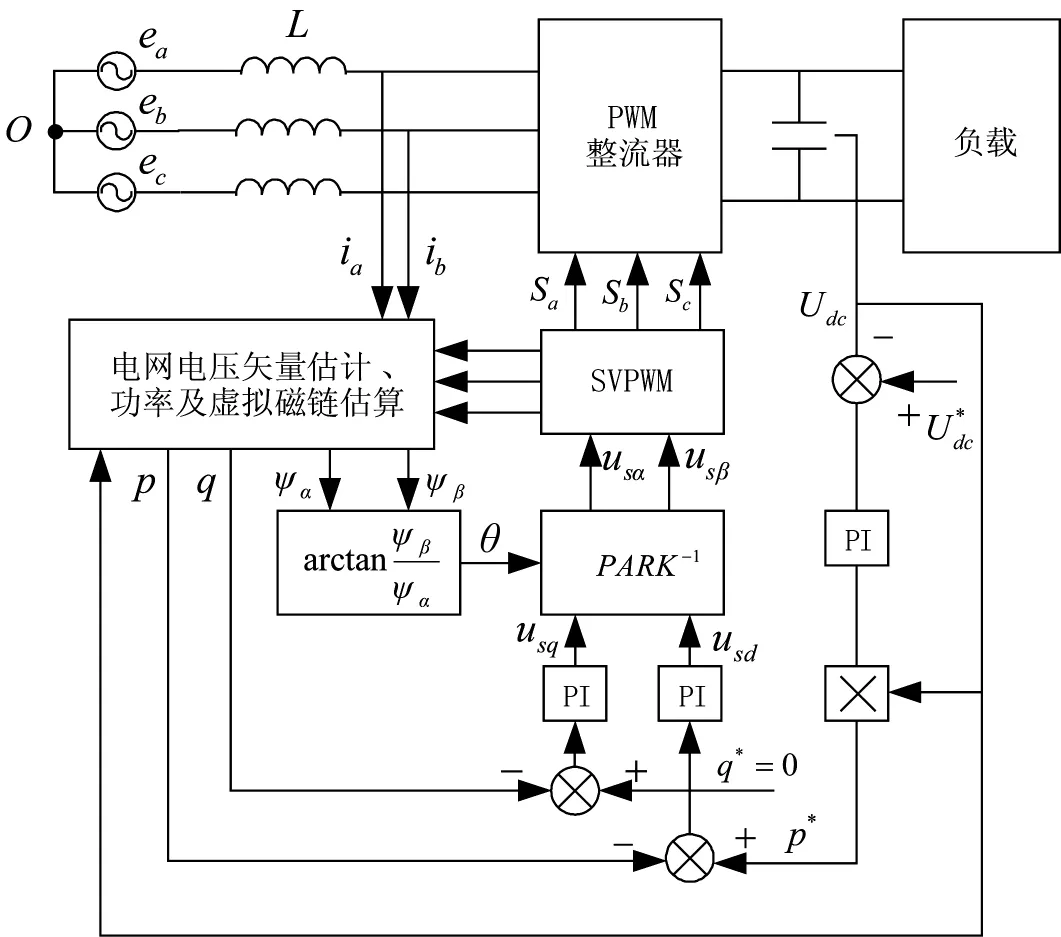
图5 VF-DPC-SVM控制系统结构原理图
将瞬时功率估算得到的有功、无功功率p和q分别与功率参考值p*、q*进行比较,把比较得出的误差量送入功率控制器,转换为系统的有功电压分量usd和无功电压分量usq,电压分量usd与usq再经过PARK逆变换后得到usα和usβ,其中,变流器交流侧电压分量与功率控制器输出的关系式为:
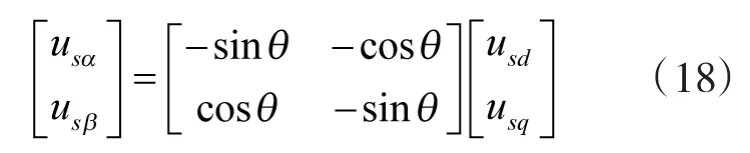
最后,系统将usα和usβ送入SVPWM调制模块计算得到控制三相PWM整流器的开关状态Sa、Sb、Sc,从而实现对系统的闭环控制。
3.1 电压外环设计
传统DPC通常采用直流电压偏差作为电压外环的输入,未考虑实际直流电压的非线性,为了便于控制器设计,本文中电压外环控制环节采用电压平方环控制,电压调节器的传递函数Cv(s)为:

式中,Kp和Ki分别为PI环节比例增益和积分增益。电压外环控制器以电压平方项为输入,有功参考电流id*为输出,有:

它与直流母线电压udc的乘积作为有功功率的参考量p*,而为了实现变流器单位功率因数运行,将无功功率参考量q*设为零。
3.2 功率内环设计
由等功率坐标变换和瞬时功率理论知,三相VSR系统在两相旋转dq坐标系下的功率表达式为[14-15]:
可以看出,除了有功电压分量ed和eq外,瞬时功率值还受耦合项-ωLq、ωLp以及交流电压usd、usq的影响,增加了控制器设计的难度。为提高系统控制性能,采用功率前馈解耦控制策略对功率内环进行设计,基于PI控制对功率偏差进行调节,具体如下:

式中,Kp和Ki分别为PI环节比例增益和积分增益。
令 Le=L/ed,Re=R/ed,将式(22)代入式(21)可得:
由上式可知,基于功率前馈解耦的控制方法实现了系统有功功率和无功功率的独立控制。
4 实验仿真
4.1 仿真分析
在MATLAB/SIMULINK环境下搭建储能电源三相VSR控制模型,其中交流输入电压为380 V,网侧滤波电感L为3 mH,输入等效阻尼电阻R为0.5 Ω;直流侧电压指令值为650 V,负载电阻为40 Ω,功率为19 kW,开关转换频率为20 kHz,对系统模型进行仿真,设置仿真时间为0.5 s,负载在0.2 s突变到20 Ω,可得到仿真结果如图6、图7所示。其中,图6(a)、图6(b)为传统 DPC 控制下整流运行时三相VSR的交直流电压仿真波形,图7(a)、图7(b)为基于VF-DPC-SVM控制下的三相VSR的交直流电压仿真波形。
由仿真结果可以看出,基于SVPWM的三相VSR具有快速的动态响应,采用基于VFO-DPC-SVM控制的PWM整流器交流侧电流能够很好地跟踪输入侧电压波形相位,相电流谐波含量大大降低,鲁棒性能好。在0.2 s负载突减时,在控制器的调节下,直流侧母线电压抖动幅度小,并能在0.05 s内稳定电压给定值650 V,改善了被控系统的稳动特性。
4.2 实验结果
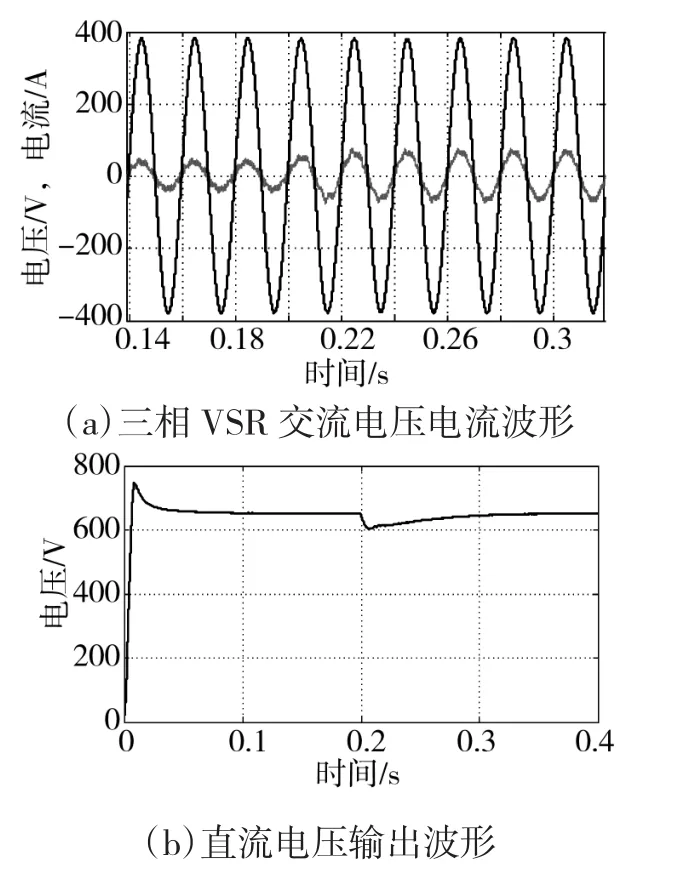
图6 0.2 s突减负载时传统DPC控制下输出波形
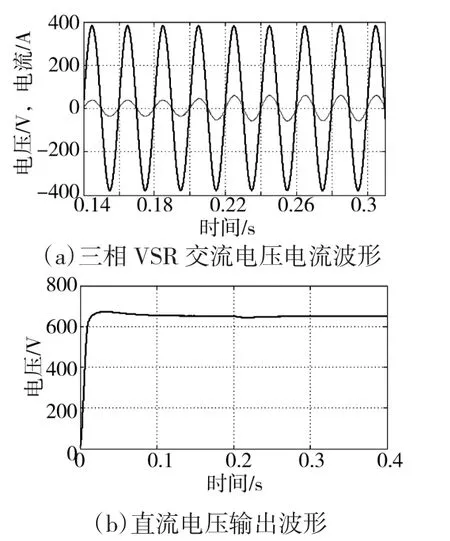
图7 0.2 s突减负载时VF-DPC-SVM控制下输出波形
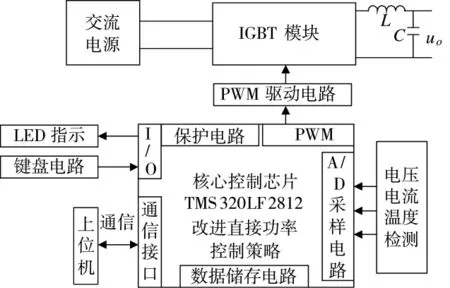
图8 系统硬件结构框图
在一台30 kVA储能电源样机上进行实验,实验装置的硬件结构框图如图8所示。PWM驱动芯片选用三菱公司的M57962L型芯片,系统的主控芯片采用TI公司生产的TMS320LF2812型DSP,其时钟频率达到150 MHz,集成了转换时间达60 ns的12位高速A/D转换器以及功能强大的事件管理器。本系统的设计采用模块化编程的思想,DSP程序先对系统进行初始化后,再调用中断子程序执行相关任务,具体包括电网相位跟踪程序、SVPWM子程序、改进直接功率控制策略和AD采样子程序等。图9、图10分别为稳态输出时a相交流电压电流波形和直流侧电压波形。
经三相功率测量模块实测,采用VF-DPC-SVM控制方法可以较好实现网侧电流波形和电压波形同相位,改进后解耦策略功率因数达到0.99。由实测波形可知,VFO-DPC-SVM控制下的储能变流器具有良好的输入特性,可以实现无静差调节,输出直流电压基本保持不变,系统性能得到提高,验证了该控制方法的有效性。

图9 交流电压电流输出波形
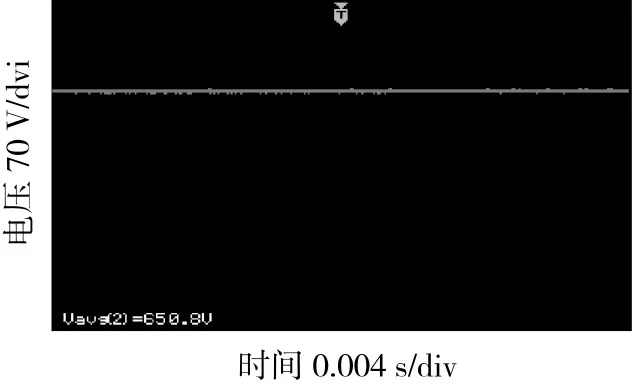
图10 直流电压输出波形
5 结论
本文在VFO-DPC系统中引入空间矢量调制(VSM)模块取代开关表,通过SVPWM算法构建VFO-DPC系统,将DPC与改进SVPWM技术相结合。仿真结果表明采用VFO-DPC-SVM控制方法可以实现网侧电流与电压波形同相位,储能变流器具有良好的输入特性,可以实现无静差调节,输出直流电压基本保持不变,系统性能得到提高。
