DMC-PID串级控制在拖轮动力定位系统中的应用
2018-11-05杨奕飞吴艳艳谈敏佳
杨奕飞,吴艳艳,谈敏佳
(江苏科技大学 电子信息学院,江苏 镇江212003)
0 引言
船舶动力定位系统[1-2](dynamic positioning system),指的是船舶利用自带的推进器等装置产生推力以抵御风、浪、流等外界环境干扰力对船产生的干扰,从而使船舶保持在某一固定位置或沿预设航向航行的系统。
拖轮在海上航行或进行拖曳作业时,往往会受到复杂多变的海上环境的影响,即风、浪、流等外界环境的干扰,这些都会对拖轮航行的航向和定位产生相当大的影响。
动态矩阵控制[3-4](DMC)是典型的预测控制算法其中的一种,近年来被广泛应用于控制领域。DMC算法是基于系统阶跃响应的控制算法,它适用于带有纯滞后环节的线性对象,且对大惯性系统的适应能力强,因而该算法的鲁棒性和跟踪性较好。然而,动态矩阵控制应用于控制系统,其抗干扰能力很差,且拖轮在海上航行要面对各式各样的环境干扰,因而在运用动态矩阵(DMC)的过程中引入了具有强抗干扰能力的PID控制,即DMC-PID串级控制。把DMC控制和PID控制相结合,这种控制算法既有很好的抗干扰能力,又有良好的稳定性和鲁棒性。目前, DMC-PID串级控制已被广泛应用于化工、温控等领域[5],且控制效果良好,但其在动力定位中的应用极少。本文将DMC-PID串级控制应用于动力定位系统,具有一定的创新性。
1 系统运动模型
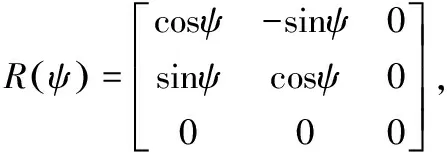
拖轮在海上运动的数学模型主要由两部分组成:高频运动模型和低频运动模型。由于拖轮高频运动仅仅造成船体的上下振荡,不会影响拖轮的位置变化,因而本文拖轮的运动只考虑低频运动,即拖轮在纵荡、橫荡、艏摇3个自由度上的运动。
拖轮低速船舶运动模型[6-7]如式(1)所示。
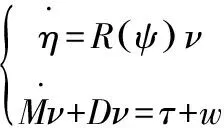
(1)

2 环境干扰力模型
拖轮在海上进行拖曳作业时往往会受到风、浪、流等外界环境作用力的干扰,使得拖轮的位置和艏向发生变化。
2.1 风的模型
设ρa为空气密度,则风作用在拖轮上的风力和风力矩计算公式[8]如式(2)所示。
(2)
式中:Vw为相对风速;AT、AL分别为上层建筑正投影和侧投影面积;L为拖轮总长;Cdx、Cdy、Cdn分别为纵荡、橫荡方向的风力系数和艏摇方向的风力矩系数。
2.2 流的模型
一般情况下,流载荷的计算方法和风载荷类似,其计算公式可以表示为:
(3)
式中:Vc为流速;ST、SL分别为拖轮水线下的正投影和侧投影面积;L为拖轮总长;Ccx、Ccy、Ccn分别为纵向、横向方向的流力系数和艏摇方向的流力矩系数。
2.3 二阶波浪力模型
拖轮在海上作业时所受的海浪干扰可分为两部分:一阶波浪力和二阶波浪力。本文主要是研究拖轮的低频运动,高频部分则通过滤波方式滤除,这里将不再考虑一阶波浪力。
考虑到波浪对船舶操纵性能的影响,Daidola提出了下列波浪漂移力和力矩的计算公式:
(4)
式中:Lw为船舶水线长;a为波浪的平均幅值;Cxw、Cyw、Cnw为纵向、横向、艏摇3个方向的实验系数,λ为船舶与波浪的遭遇角。
3 控制算法及控制系统结构设计
3.1 动态矩阵控制
1)预测模型
预测模型为:
(5)
其中,A为系统的动态响应矩阵,P为预测时域,M为控制时域。
2) 滚动优化
DMC是一种以优化确定控制策略的算法。采样时刻t=kT的优化性能指标可取为:
(6)
3) 反馈校正
预测误差:
e(k)=r(k)-y(k)
(7)
校正后的预测输出为:
(8)
参考轨迹柔化后的轨迹:
(9)
式中i=1,…,P。
系统校正后的预测值作为系统下一时刻的预测初值,移位过程如式(10):
(10)
3.2 DMC-PID串级控制系统
针对拖轮,本文提出了将动态矩阵控制和PID控制相结合的串级控制算法,它的系统控制框图如图1所示。
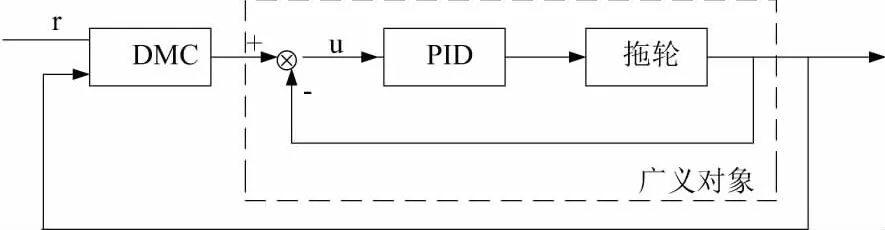
图1 DMC-PID串级控制结构
DMC-PID[9-10]串级控制是指在内环控制回路中采用传统的PID控制,外环回路采用动态矩阵控制(DMC)。内层采用PID控制,这一层控制采用了比DMC控制高得多的频率,其目的在于快速有效地抑制外界风、浪、流等环境的干扰。这一被控回路可视为一个广义对象。在外层,再用DMC对这一广义对象进行控制[9],以保证系统具有良好的鲁棒性。这种DMC-PID串级控制兼具了PID控制的强抗扰能力和动态矩阵控制良好的鲁棒性和动态性。
3.3 参数选择
对于拖轮,控制算法中参数取值不同时,其控制效果也会发生变化。在仿真研究过程中,总结出以下几条参数整定的规律:
1) 采样周期T和模型长度N:T和N的选择尽可能完整地包含对象的动态信息。从计算机的计算需求和内存角度出发,应当选择适当的采样周期T以便模型维数保持在20~50。
2) 预测时域P:在覆盖拖轮阶跃响应主要动态信息的前提下,P的取值越小,系统的快速性越好;P取值越大,系统的稳定性越好。
3) 控制时域M:M值越小,控制系统跟踪性能越差;M值越大,系统的稳定性变差。
4) 误差权系数qr:与P的取值相对应,时滞部分qr=0,剩下部分取1。
5) 控制权系数ri的主要作用在于防止控制增量发生剧烈变化。参数整定时,可先设置ri=0;若控制量变化剧烈,可略加大ri,实际上,ri只取一个较小的值就能使控制量变化趋于平缓。
6) 柔化因子α:α越小,拖轮的抗干扰性越差,鲁棒性越好(0<α≤1)。
4 系统仿真研究
以拖轮为例,用MATLAB软件对其控制系统进行仿真研究。拖轮的相关参数[10]见表1。
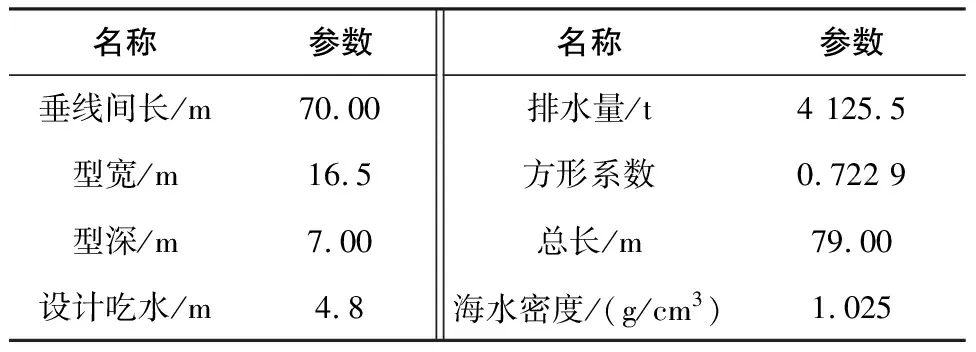
表1 拖轮相关参数表
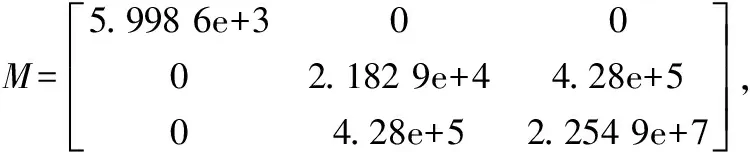
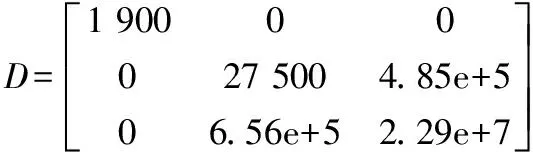
通过经验公式估算得到式(1)中的参数矩阵为:
DMC-PID串级控制和PID控制下纵荡方向的仿真图如图2。
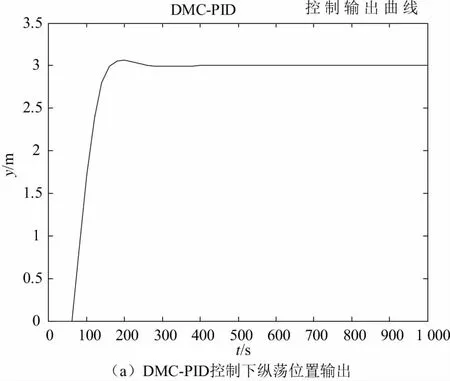
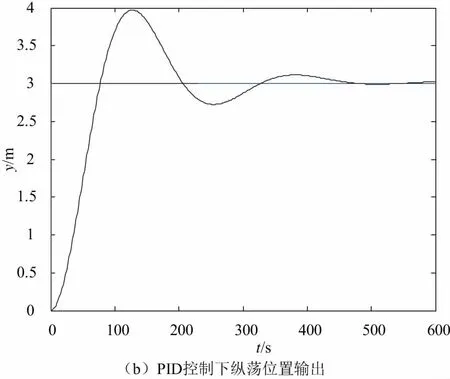
图2 DMC-PID串级控制和PID控制下纵荡位置输出
在t=600s处,给系统加一个d=1的外界干扰,DMC-PID串级控制和PID控制下纵荡方向仿真图如图3。
对比仿真结果,图2中两幅图可知,DMC-PID串级控制算法的控制效果更好。对比仿真结果,不难发现:在PID、DMC-PID控制下,系统到达稳态值的时间分别约为250 s、450 s。从系统超调角度考虑,DMC-PID串级控制下的系统基本实现无超调,而PID控制下的系统超调量较大,系统跟踪性不是很好。对比图3中两幅图,干扰情况下,PID、DMC-PID串级控制下系统恢复到稳定状态的时间分别为200 s、350 s,显然DMC-PID串级控制下系统的抗干扰能力更好。综上所述,结合快速性、稳定性和抗干扰能力,DMC-PID串级控制的控制效果更好。
5 结语
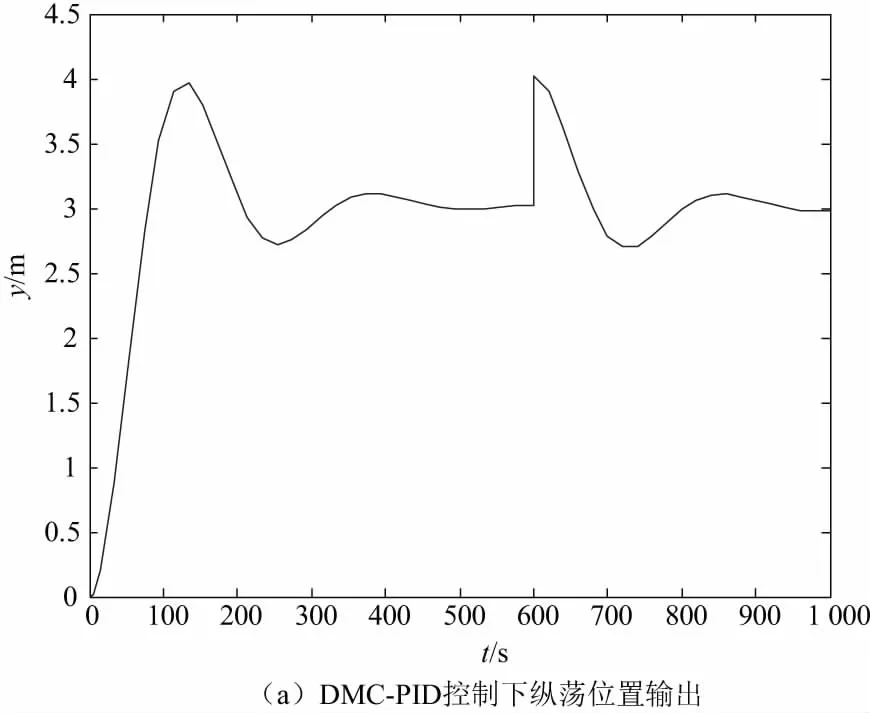
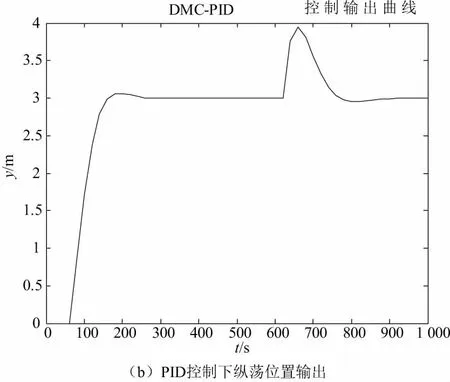
图3 干扰情况下纵荡位置输出
以天航拖轮为控制对象,提出了DMC-PID串级控制算法,并且设计了相应的控制系统,且对其控制效果进行了仿真研究,并与传统PID控制的仿真结果进行了对比分析,结果表明:
1) 在相同条件下,多功能拖轮在DMC-PID控制下的控制效果更好,不仅提高了系统的快速性,且跟踪性和稳定性较好。
2) 在给系统加相同的外界干扰的情况下,与传统PID控制相比,DMC-PID控制下系统具有更强的抗干扰能力。
3) DMC-PID串级控制能提高系统的快速性和稳定性,且具有较强的抗干扰能力,从而有效地提高了拖轮的动力定位能力。
