基于姿态估计的里程计辅助捷联惯导系统动基座初始对准
2018-11-01刘海洋徐军辉甄占昌
刘海洋 徐军辉 甄占昌 李 亚
火箭军工程大学,西安 710025
传统初始对准由2个连续的阶段完成,即由粗对准获得大致已知姿态,利用卡尔曼滤波完成精对准[1]。传统的粗对准方法直接利用惯组传感器的输出与地球速度和重力之间的关系,由于车辆的操纵性和外界干扰,不适合于动基座对准,因此通过将载体的姿态分解为独立的地球运动、惯性速率和恒定的初始姿态3个部分,研究出了一种基于姿态确定的递归对准方法[2-13]。姿态确定对准(ADBA)利用有限矢量观测,将姿态对准问题转变为连续姿态确定问题。因其抗干扰性和牢固性, 姿态确定对准作为传统粗对准的有效替代得到了广泛认可。姿态确定对准方法大多数是为了GPS和扩展多普勒计程仪(DVL)辅助惯导系统而开发的[10-12]。相比GPS,里程计或DVL不能直接提供姿态确定对准矢量观测所必要的位置和地速信息,因此必须使用估计值,在一定程度上降低了对准性能。对于里程计辅助捷联惯导,姿态确定对准的另一个缺点是它无法处理里程计速度输出固有的严重扰动。这些缺点使姿态确定对准在里程计辅助捷联惯导上的表现缺乏抗性,例如收敛速度慢、易发散等。对于使用估计值会降低对准性能的缺点,一些研究人员已经研究了回溯法来获得位置信息[10,14]。然而,对于第二个缺点,尚没有公开的有效解决方法。如果里程计固有的扰动不能妥善处理,就完不成姿态确定对准,之后的回溯方案需要姿态确定对准提供的大致结果,也不能实施。
基于上述考虑,对里程计辅助捷联惯导系统提出了基于姿态估计的对准方法(AEBA)。通过分解姿态矩阵并利用里程计的输出而非估计值导出过程模型。根据特殊的姿态矩阵分解和车体的特殊方程构造矢量观测模型,推导出测量模型。虽然运用姿态估计对准可以避免一些额外的估计,并在一定程度上减弱里程计的固有扰动。但是实验表明,姿态估计结构不能充分地减弱这个扰动。由此,采用低通有限脉冲响应(FIR)数字滤波器对扰动进行初步抑制,然后将预处理后的里程计输出用于姿态确定对准中。
1 基于姿态估计的初始对准
姿态确定是一种静态方法,不考虑测量的统计特性。姿态估计是指在滤波算法中使用车辆运动模型的动态方法。同时,滤波结构也能在一定程度上抑制测量中的固有干扰。在这方面,姿态估计一般优于姿态确定。本节主要研究建立里程计辅助捷联惯导系统初始对准的姿态估计模型。
1.1 过程模型
(1)
其中,b(0)和n(0)是惯性非转动系,在t0时刻分别与车体和导航系对准。
将惯性系b(0)表示为i。因此

(2)

(3)

(4)
RM和RN分别是本初子午线和赤道的主曲率半径。h是载体的高程。在姿态估计对准中,纬度L用已知的初始值L0估测。vb和vn的关系为
(5)
将式(4)和(5)代入式(3)中得到

(6)

1.2 量测模型
由加速度计/陀螺仪的线性/角信息,给出导航系内车辆的速度方程

(7)
其中,fb表示载体系中的特定的力;gn是惯性系中的重力加速度。
代数变化之后,式(7)变换为

(8)
将式(1)代入(8)得

(9)


(10)
式(10)两边对时间积分

(11)
(12)
将式(12)代入(11)中得
(13)
(14)
将式(14)代入(13)中,紧凑测量模型得到

(15)
其中
(16a)
(16b)
这些值都可以用文献[4]中的相似速度积分公式计算。
2 FIR对里程计输出预处理
(17)
(18)
3 仿真实验
为了评估性能,仿真使用惯组规格列在表1中。
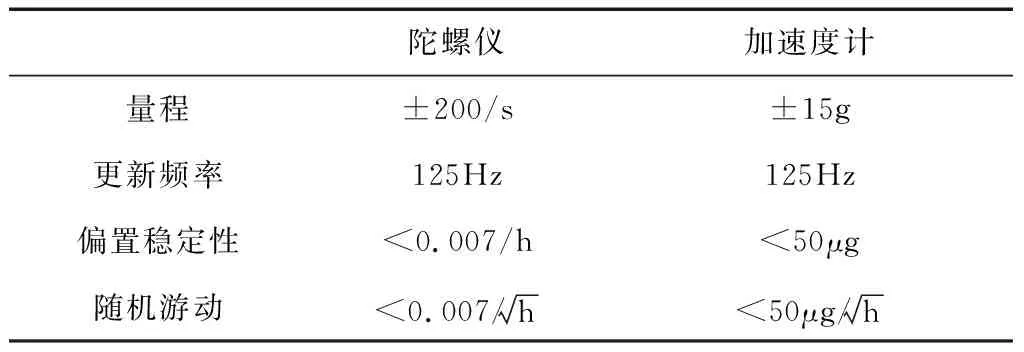
表1 陀螺仪和加速度计规范
实验以下4种对齐方法:
ADBA1:ADBA没有里程表输出去噪。
ADBA2:ADBA里程表输出去噪。
AEBA1:AEBA没有里程表输出去噪。
AEBA2:AEBA里程表输出去噪。
ADBA1和AEBA1用于演示里程表测量固有的严重干扰的负面影响。ADBA2和AEBA2用来展示AEBA2比ADBA2更优越。
姿态估计对于姿态确定的优势也可以通过AEBA1和ADBA1比较说明,这将在后续的研究中加以证明。表2概述了姿态对准误差。表3总结了4种不同对准方法的偏航角估计的相对误差,以突出该方法的鲁棒性和可靠性。

表2 不同数据段不同方法的姿态对准误差(单位:(°))
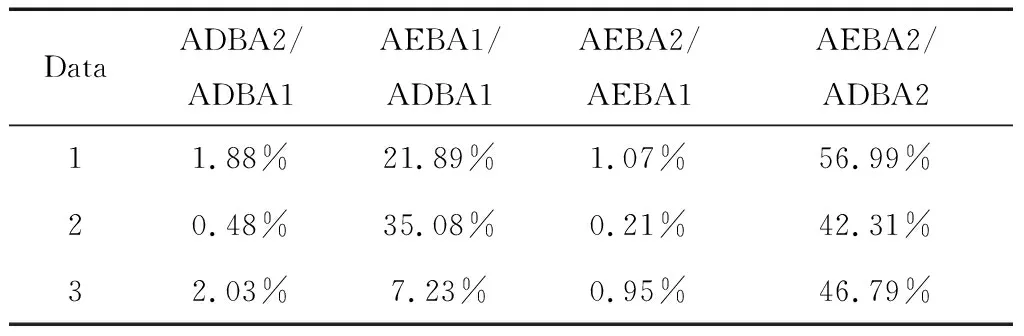
表3 不同对准方法的相对误差(偏航角估计,绝对值)
虽然ADBA1和AEBA1偏航角估计已在表2中提出,由于里程表输出固有的严重干扰,他们并不收敛。然而,与ADBA1相比,AEBA1的性能得到了很大提高,这表明AEBA方法可以抑制里程表测量内一定程度的干扰。但严重的干扰都出现在AEBA的过程和测量模型中,与惯性传感器固有的干扰有很大关系,使仅通过卡尔曼滤波抑制的效果弱化。这一事实表明,有必要对里程计输出进行预处理,以消除固有干扰。当FIR滤波器集成到ADBA和AEBA方法,由此产生的性能有很大的提高,如表2所示。通过ADBA2和AEBA2偏航角估计都可以达到满意的程度。此外,为所有3个数据段的偏航角估计,AEBA2可以始终超越ADBA2,优势在于完善的姿态估计模型,其中的里程计量测干扰可以进一步被抑制,导航系的角速率可以始终无遗漏地记录下来。
为说明这4种方法的定位性能,使用3个数据段的偏航角估计结果绘制在图1~9。
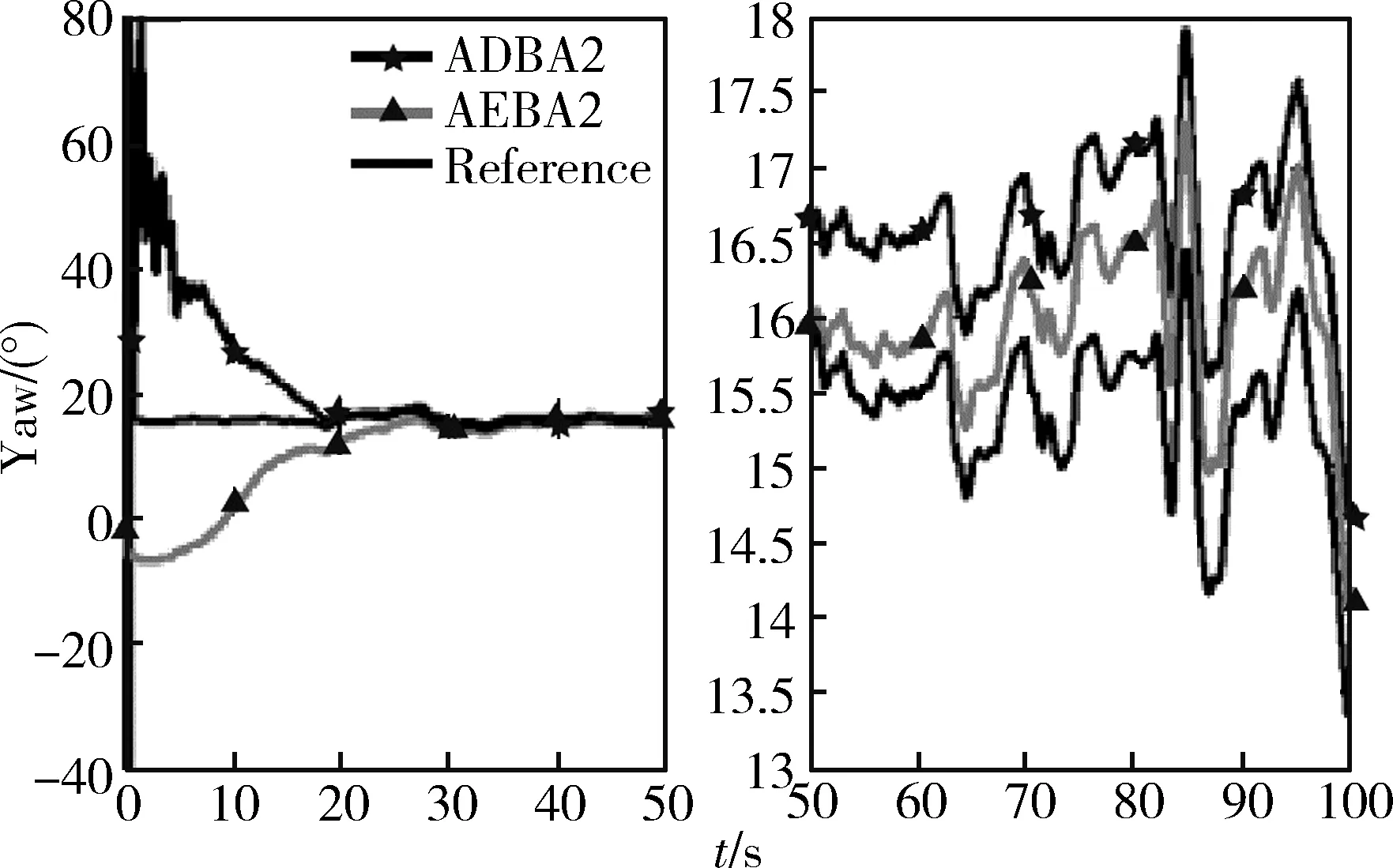
图1 AEBA2 和ADBA2第1个数据段结果比对
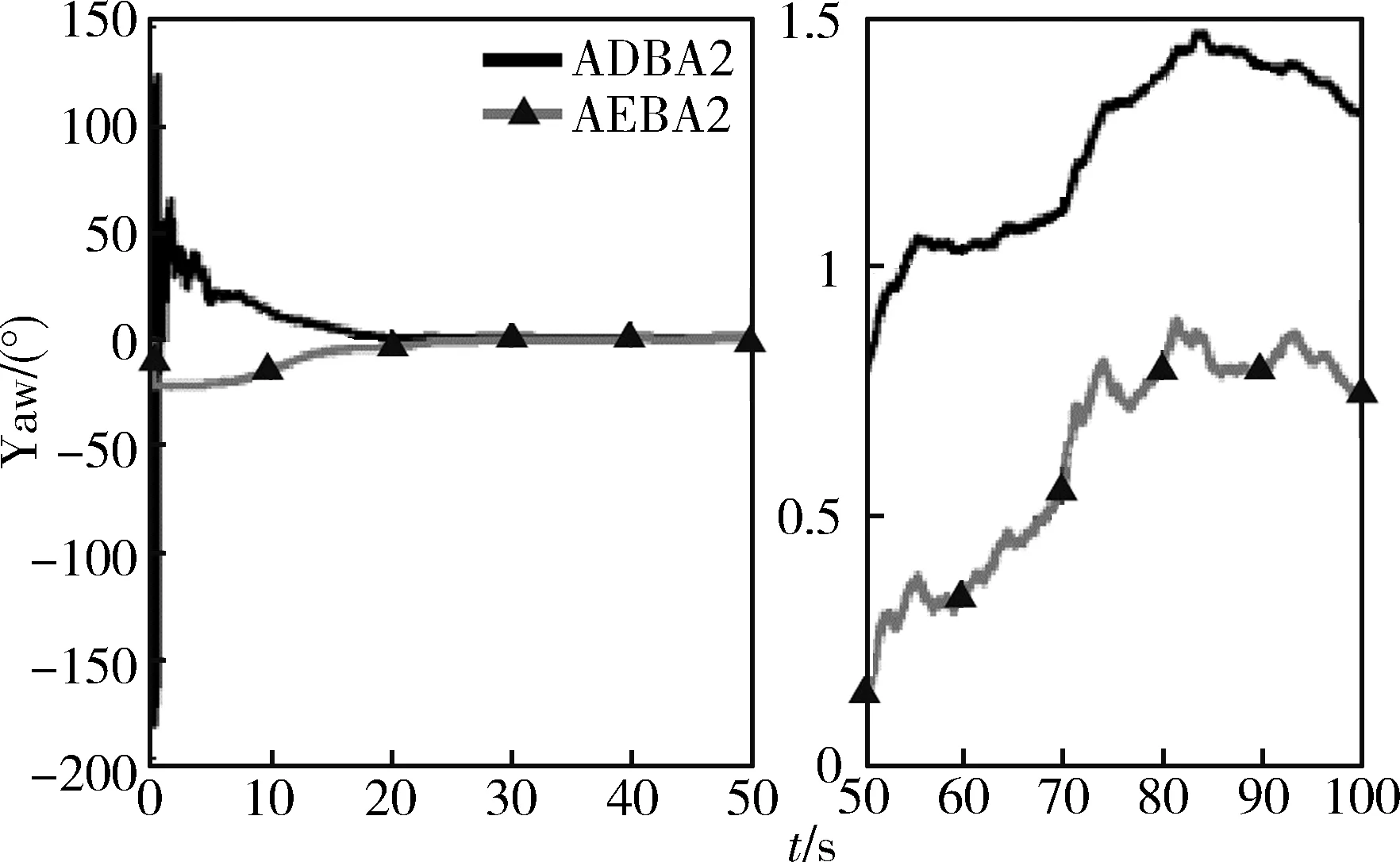
图2 误差估计
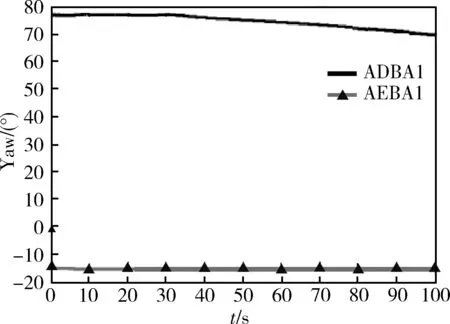
图3 ADBA1和AEBA1第1个数据段的误差比较
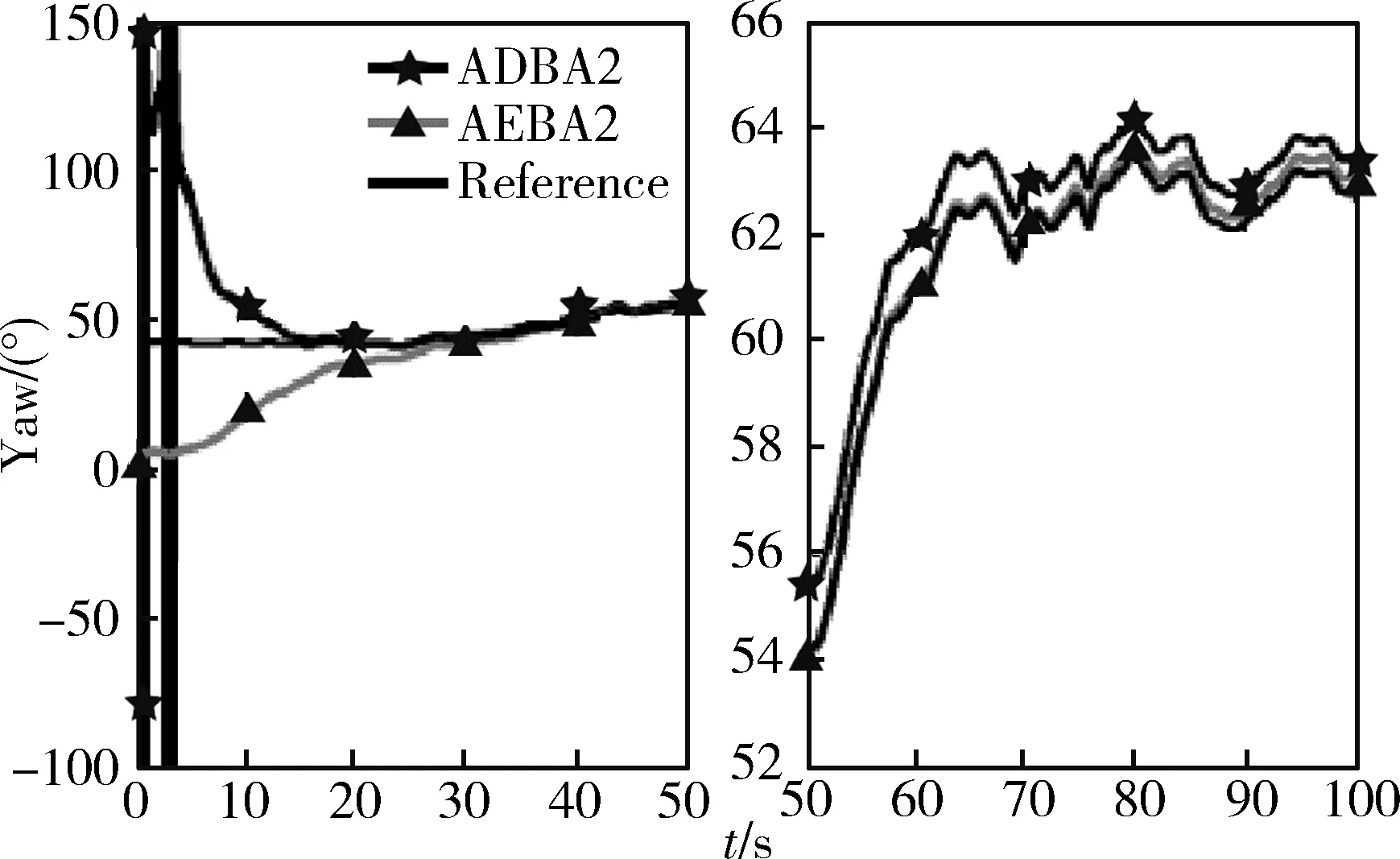
图4 AEBA2 和ADBA2第2个数据段结果比对
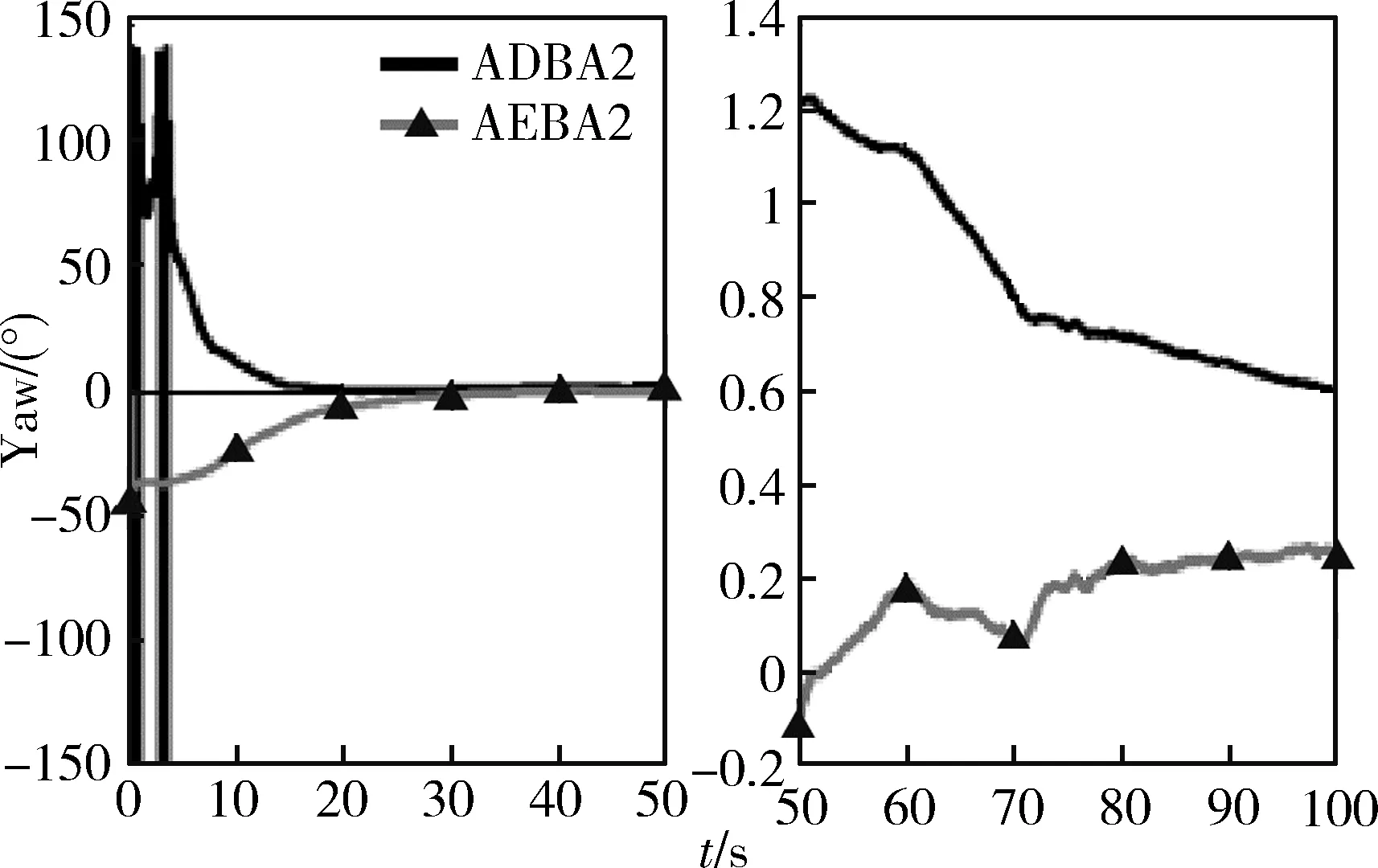
图5 误差估计
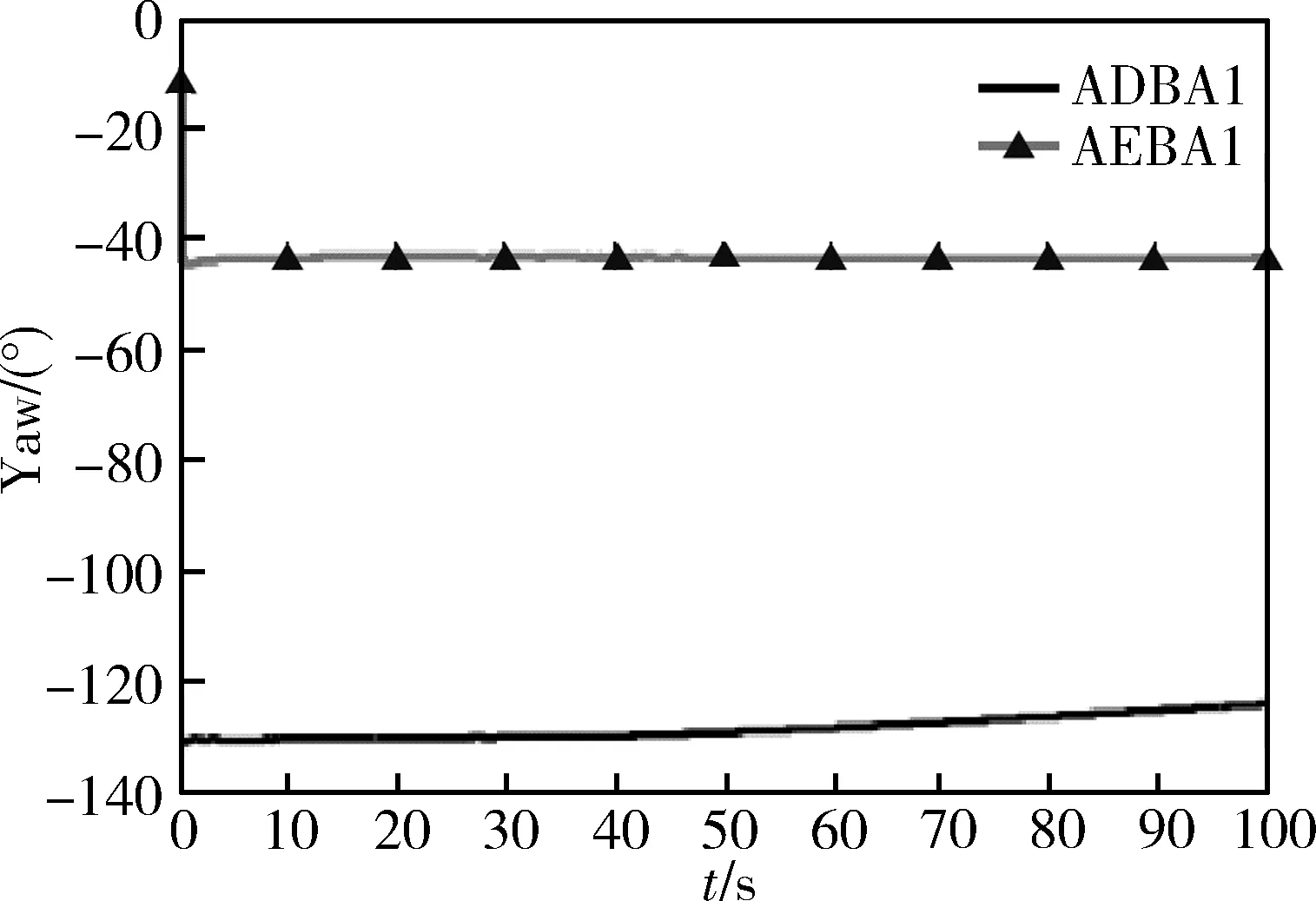
图6 ADBA1和AEBA1第2个数据段的误差比较
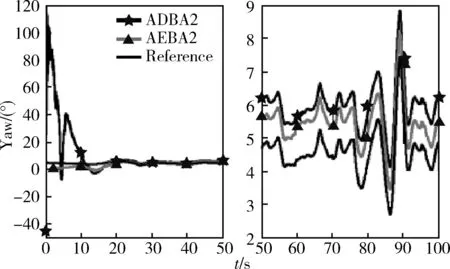
图7 AEBA2 和ADBA2第3个数据段结果比对

图8 误差估计

图9 ADBA1和AEBA1第3个数据段的误差比较
3 小结
基于航位推算的里程计辅助捷联惯导系统的姿态初始化是非常重要的。新提出的基于姿态确定的对准方法已被证明是GPS辅助捷联惯导初始对准的有效方法。然而,当它扩展到里程计辅助捷联惯导系统对准时,结果随着里程计的量测干扰而发散。本文提出了一种基于姿态估计的对准方法,通过巧妙的姿态矩阵分解和速度方程重构提高姿态确定对准的对准性能。由于姿态估计不能充分解决扰动影响,采用有限脉冲响应数字滤波器对里程表输出进行预处理,消除干扰。结果表明,随着里程表固有干扰的处理,捷联惯导系统能很快地对准速度。基于姿态估计的姿态对准在姿态确定对准中的优越性也得到了很好的证明。