临近空间飞行器两种捷联惯导算法的等价性*
2018-11-01刘明鑫
陈 凯 殷 娜 刘明鑫
西北工业大学航天学院,西安710072
临近空间通常是指距地面20km~100km处的空域,临近空间区域包括大气平流层的大部分区域、中间大气层区域和部分电离层区域。临近空间下面的空域是传统航空器的主要活动空间,其上面的空域是传统航天器的运行空间。顾名思义,临近空间飞行器是指高于普通飞行器飞行空间,而低于轨道飞行器运行空间区域的飞行器,临近空间飞行器在临近空间巡航飞行[1]。
本文探讨临近空间飞行器捷联惯导算法。以助推-滑翔高超声速飞行器为例,临近空间飞行器的飞行剖面主要包括助推段、自由弹道段、弹道再入段、弹道爬升段和滑翔段等飞行阶段[2]。从飞行阶段看,助推段、自由弹道段、弹道再入段和弹道爬升段等阶段,属于航天领域的飞行轨迹,控制系统需要航天体系下的导航数据进行制导控制;而滑翔段飞行器沿着地球表面飞行,以地球表面作为参考,属于航空领域的飞行轨迹,控制系统需要航空体系下导航数据进行制导控制。可见,高超声速飞行器具有航天和航空的双重飞行控制和导航需求。
一般认为,航天和航空2个领域的捷联惯导算法,是为适应各自领域的应用而设计,二者互不相关。张卫东研究了航天体系下运载火箭的捷联惯导算法[3],航天体系下飞行器的典型特点是垂直发射,典型的飞行弹道是在射面附近。熊智针对高超、空天飞行器在发射过程中需要直接获得发射惯性系下的高精度导航参数的需求,研究了发射惯性系下弹载组合导航系统[4]。Savage研究的捷联惯导算法适合于航空体系下水平飞行的飞行器[5]。X-43A高超声速飞行器采用的Honeywell公司的H-764系列INS/GPS组合导航系统,X-43A的飞控计算机与SLAM-ER防区外导弹相同,采用了航空体系下的导航算法[6]。X-51A和HTV-2均采用成熟的惯导系统[7-8]。Stephen S研究了地心惯性坐标系下高超声速飞行器的捷联惯导算法[9]。
针对不同的临近空间飞行器,各种文献采用了不同的导航算法,没有相关文献介绍各种体系下导航算法的相互关系。本文分别介绍了航天体系下发射惯性坐标系和航空体系下当地水平坐标系的捷联惯导算法,推导了2种体系下导航信息的关系,为临近空间飞行器捷联惯导算法的选择提供参考依据。
1 发射惯性坐标系导航算法
发射惯性坐标系下捷联惯导算法是航天体系下的经典导航算法,输出发惯系下适合垂直发射/起飞的飞行器的位置、速度和姿态信息。涉及的坐标系和定义如下[10-12]:
1)地心惯性坐标系(i系);
2)地球固连坐标系(e系);
3)发射坐标系(g系);
4)发射惯性坐标系(a系)。发惯系是航天飞行器的导航参考坐标系;
5)弹体坐标系(ba系),采用前上右坐标指向。
发惯系下的捷联惯性导航方程如式(1)所示[3,13]。
(1)
(2)
其中,φa为发惯系下飞行器的俯仰角;ψa为偏航角;γa为滚转角;Mx(γa)、My(ψa)和Mz(φa)定义与文献[12]相同。
2 当地水平坐标系导航算法
当地水平坐标系下捷联惯导算法是航空体系下的经典导航算法,适合水平或倾斜发射/起飞的飞行器。其导航信息包括经纬高位置、相对当地水平的速度及相对当地水平的姿态角等当地水平坐标系下导航信息。航空体系下涉及的坐标系和定义如下[10-12]:
1)当地东北天水平坐标系(水平系,n系),当地水平系是航空飞行器的导航参考坐标系。
2)弹体坐标系(bn系),本文采用右前上坐标指向。
当地水平系下的捷联惯性导航方程为如式(3)所示[5]。
(3)


(4)
临近空间飞行器的巡航飞行高度大于传统航空飞行器的飞行高度。基于当地水平坐标系的重力公式采用简化球形模型,对于临近空间飞行器长时间长距离飞行会带来较大误差[13]。本文采用地固系下的J2重力模型,计算方法如式(5)所示。
(5)
(6)
ge=Ge+ωie×ωie×re
(7)
(8)
(9)

3 2种体系下导航信息的等价性
根据航空体系水平系下的位置、速度和姿态导航信息,可推导出航天体系下发惯系下的导航信息,由此证明,发惯系下的导航信息和水平系下的导航信息是等价的。
3.1 位置信息的等价性
当已知飞行器当前的纬经高(L,λ,H)时,可根据式(9)得到地固系下的位置pe,再根据pe可得到发射系下的当前位置pg为
(10)

(11)
发射系与发惯系的区别在于:发惯系是不随地球自转的,而发射系是与地球固连随着地球自转的。因此,假设地球不旋转,所以此时发惯系下的经纬高(L1,λ1,H1)如式(12)所示。
(12)
(13)
可得发惯系下的位置pa。
(14)
3.2 姿态信息的等价性

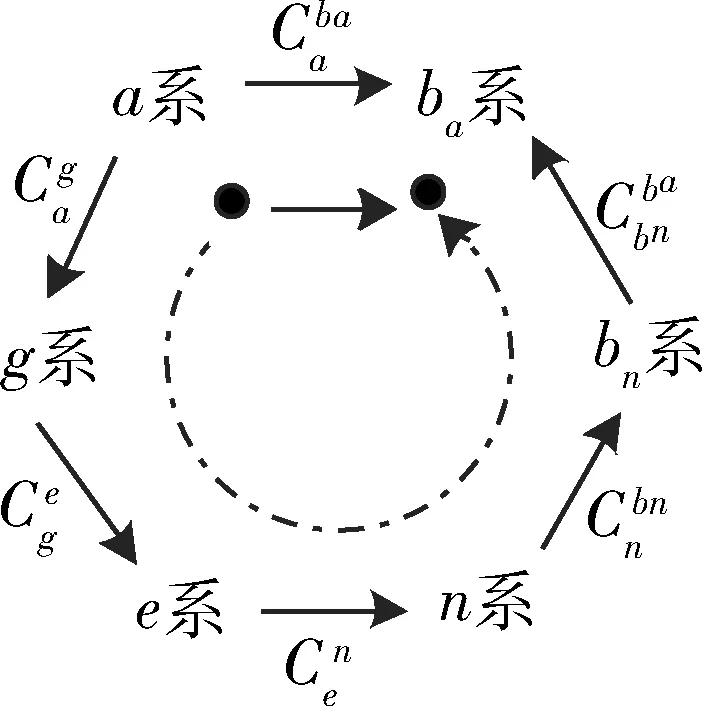
图1 姿态矩阵传递关系
(15)
式(15)中,各姿态矩阵的定义为:

(16)



(17)

(18)
3.3 速度信息的等价性
根据水平系下的速度矢量vn,可得到发射系下的速度矢量vg
(19)

(20)
其中,pg如式(10)所示,则发惯系下速度va为
(21)

4 结论
针对临近空间飞行器具有航天和航空双重导航信息需求的特点,介绍了航天体系下发射惯性坐标系捷联惯导算法和航空体系下当地水平坐标系的捷联惯导算法,推导了2种体系下导航信息的等价性。可根据实际的临近空间飞行器飞行弹道特点,选择合适的导航体系。