面向多障碍物海面卫星搜索动目标方法
2018-10-15张海龙胡笑旋
张海龙, 夏 维, 胡笑旋, 杨 斌, 汤 航
(1.合肥工业大学管理学院, 安徽 合肥 230009; 2.过程优化与智能决策教育部重点实验室,安徽 合肥 230009; 3.北京遥感信息研究所, 北京 100192)
0 引 言
随着海上活动日益频繁,对海洋动目标搜索有着极大的应用需求,如海洋营救、浮游生物监测、海上缉私等。但动目标运动的不确定性,使对其搜索极为复杂[1]。早期关于动目标搜索的研究主要集中于在目标分布规律已知的条件下,给出搜索资源的最优分配方案及航迹规划方案,以快速高效地搜索到目标[2-5]。这种资源分配方案适用于无人机、机器人、侦查艇等航迹可规划的侦查资源,然而这类侦查资源应用于海上动目标搜索时,受视距和活动范围限制,效果不甚理想[6]。成像卫星可从空间轨道上利用星载遥感设备对指定区域实施成像,获取目标情报信息[7]。因不受地理国界等因素限制,将其应用于海洋动目标搜索的研究引起了学者重视。文献[8-9]将成像卫星搜索海上动目标问题看作传感器资源调度问题,基于贝叶斯估计和信息熵度量提出了解决此类问题的通用方法,并介绍了在信息不确定条件下基于高斯分布的目标运动预测模型。文献[10]采用了强化学习的方法求解多星搜索海上多个移动目标的传感器调度问题。文献[11]研究了电子侦查卫星与成像卫星协同进行海洋移动目标搜索的机制。文献[12]将海上动目标搜索问题分解成为遥感器规划调度问题和动目标状态预测问题的求解框架,基于此求解框架,动目标搜索过程中不断获得环境信息,并利用所得信息指导后续搜索。为更好的描述动目标运动及搜索过程中环境信息变化,部分学者使用搜索图[13-15]建立动目标搜索环境模型。文献[16]利用搜索图表示目标运动情况,并根据搜索结果采用不同的方法更新搜索图。文献[17]综合考虑目标概率分布及环境信息,建立动目标搜索的感知信息图,在此基础上搜索动目标。上述研究较好的解决了平坦地域或海面条件下动目标搜索问题。
在现实情况下,目标所处环境可能存在障碍物或探测装置影响目标运动,从而影响对目标的搜索。如文献[18]考虑环境中存在感知探测装置,待搜索运动目标能够通过探测装置获得无人机的位置信息,从而改变运动策略,减少位置暴露。文献[19]在动态任务分配的研究中,制定了机器人在探测到环境中障碍物时的反应策略。文献[20]在搜索海域存在障碍物的情况下,将启发式搜索算法应用于对水下动目标的搜索,并建立了水下动目标规避模型,使搜索器在进行水下动目标搜索时能有效地规避障碍,提高搜索效率。但在考虑环境障碍物情况下利用卫星进行海面动目标搜索相关研究较少。
本文针对卫星搜索多障碍物海面动目标问题,利用搜索图建立动目标搜索环境模型,基于目标马尔可夫运动过程,提出一种面向多障碍物搜索海面的动目标运动预测方法。搜索图在根据卫星探测信息进行更新之后以此运动预测方法再次更新,指导卫星下次搜索。仿真实验验证了本文方法在解决面向多障碍物海面卫星搜索海洋动目标问题的有效性。
1 问题描述
多障碍物海面指海面存在如礁石等障碍物,在此海面航行的动目标需规避海面障碍物。设搜索任务起始时间为Ts,截止时间为Te。目标搜索首先根据获得的情报信息,判断任务区域R,任务区域指目标在整个搜索周期内的最大活动范围。为方便问题处理,将R进行网格划分,编号为1~M。成像卫星从空间轨道上利用星载遥感器观测R,对R中的NT个动目标进行搜索,如图1所示。
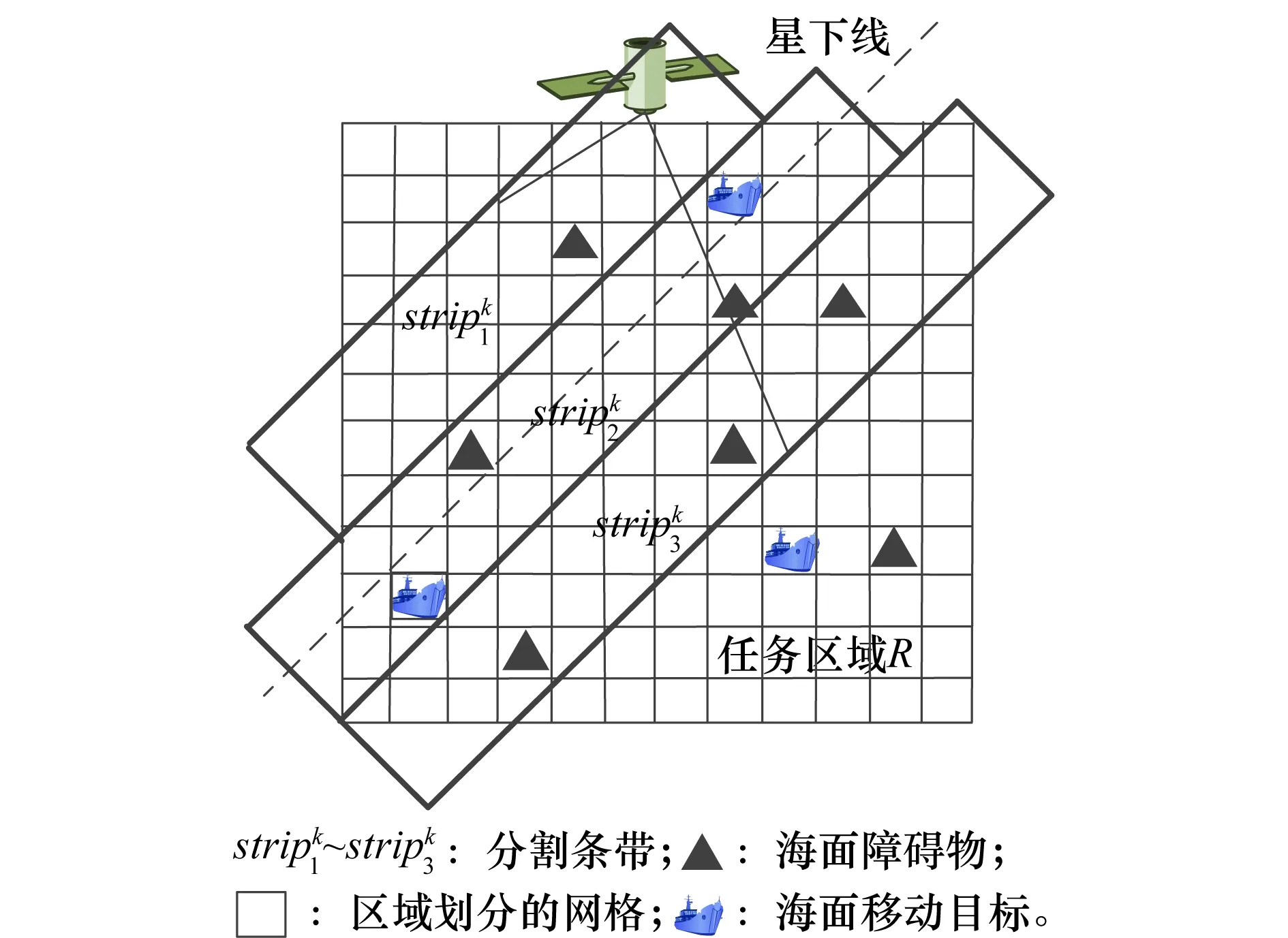
图1 多障碍物海面上卫星搜索动目标示意图Fig.1 Diagrammatic sketch of moving targets search onmulti-obstacle sea by satellite

NS颗成像卫星在[Ts,Te]内对任务区域R内的NT个动目标进行搜索,同时任务区域中存在NB个位置固定的障碍物。目标做随机马尔可夫运动,并在运动过程中探测周围障碍物,经过一个时间步长,可从当前所在网格随机运动到任一相邻的无障碍物网格。当卫星过境R时,从其观测条带集合中选择一条目标存在概率最大的条带进行观测,直至搜索任务结束。
2 问题建模
针对多障碍物海面动目标搜索问题,在确定任务区域并进行网格划分后,利用搜索图建立反映目标和环境信息的环境模型。设pi(t)为t时刻网格i中目标存在概率,则t时刻的搜索图定义为
SM(t)={pi(t)|i∈{1,2,…,M}}
(1)
在搜索过程中,搜索图根据一定规则进行更新,并基于搜索图提供的信息确定卫星过境观测时目标存在概率最大的条带。
2.1 基于探测信息的搜索图更新模型

(2)
(3)
pi(tk)=0
(4)
(5)
式(2)和式(3)中,pd和pf会受到遥感器侧向摆动影响,本文假设这些影响可以忽略且所有卫星携带相同能力的遥感器资源。
2.2 基于目标运动预测的搜索图更新模型
目标运动规律未知给卫星搜索海面动目标观测计划的制定带来困难[25]。在平坦海面条件下,常采用基于高斯分布的目标运动预测方法[8-9,23]减少搜索过程中因目标运动带来的不确定性。本文在使用搜索图建立多障碍物海面动目标搜索环境模型的基础上,根据目标马尔可夫运动特性[26-28]分析海面障碍物对目标运动的影响,提出面向多障碍物搜索海面的动目标运动预测方法以减少搜索过程中目标运动的不确定性。设搜索图网格空间为I,L(t)=j(1≤j≤M,j∈I),表示在t时刻目标处于编号为j的网格中。图2为搜索图网格空间的示意图。目标运动状态为目标经过一个时间步长Δt能够移动到当前网格的相邻网格,或仍停留在该网格。
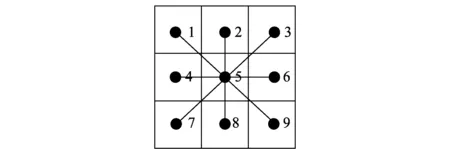
图2 搜索图网格空间示意图Fig.2 Diagrammatic sketch of the grid space of search map
假设t时刻目标在标号为5的网格中,即L(t)=5。经过一个时间步长在t+Δt时刻目标仅能移动到与5相邻的网格1,2,3,4,6,7,8,9,或仍停留在网格5,故搜索图中每个网格都对应着一个3×3的目标转移概率矩阵,这些转移概率矩阵定义了目标的马尔可夫运动过程。将海面动目标的运动状态按照一步转移概率来表示,在t时刻目标的一步转移概率为
(6)
式中,Aj表示网格j及其相邻的网格空间集合。式(6)表示在t时刻目标处于网格j中,经过Δt目标运动到网格i中的概率。
(7)
在对动目标搜索时,若已知待搜索目标的情报信息,可以利用情报信息给出符合目标实际运动情况的目标转移概率。当不知目标情报信息时,假设目标经过Δt移动到相邻网格或在当前网格保持静止的概率分布服从均匀分布,即取
(8)
海面动目标在运动过程中利用感知装置对周围环境进行探测,若相邻网格存在障碍物,目标能探测到该障碍物并进行规避。图3为多障碍物海面上搜索图网格空间示意图。
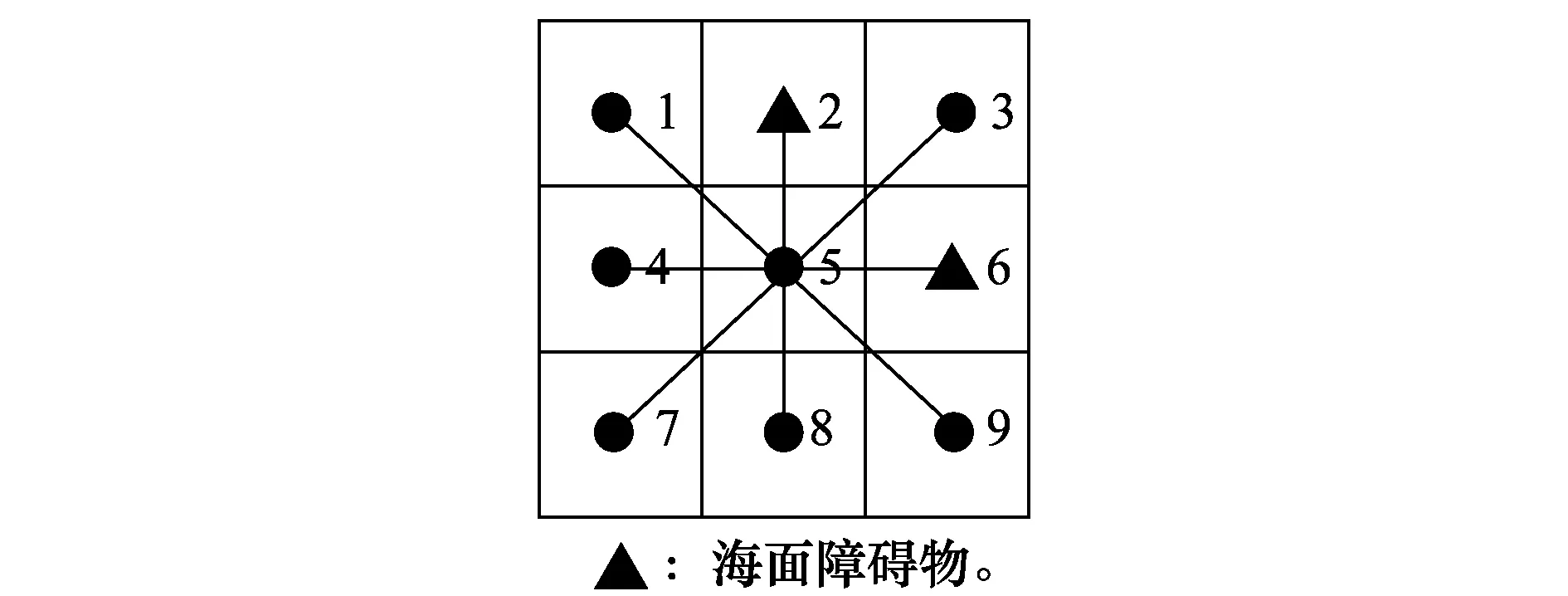
图3 多障碍物海面上搜索图网格空间示意图Fig.3 Diagrammatic sketch of the grid space of search map formulti-obstacle sea
若t时刻目标处于网格j中,探测到相邻网格空间中网格e存在障碍物,则令
(9)
对于当前网格j及不存在障碍物的相邻网格i,有
(10)
式中,η为网格j相邻网格存在的障碍物总数且η<8。
图3中,若目标在t时刻位于编号为5的网格中,并探测到相邻网格2和6存在障碍物,则目标会规避障碍物,由式(9)得
对于不存在障碍物的网格i(i=1,3,4,5,7,8,9),由式(10)得
则目标t时刻在网格5的一步转移概率矩阵为
因成像卫星分别在离散的时间点t1,t2,…,tk,…获得观测时间窗口,在卫星第k次过境R进行观测后,根据获取的探测信息采用式(2)~式(5)更新搜索图,获得目标后验概率分布。在卫星第k+1次过境R前目标将持续在R内运动,搜索图需根据目标运动特征进行更新,获得第k+1次观测前目标先验概率分布。设tk+1-tk=mkΔt(mk≥0),mk为两次相邻观测时刻tk与tk+1相差的时间步长个数。目标在一个时间步长内完成一次在搜索图网格空间上的转移,则在第k次观测与第k+1次观测之间共完成了mk次运动转移。
由目标一步转移概率,可得目标m步转移概率为
(11)
对于m步转移概率满足切普曼-柯尔莫哥洛夫方程式[29-30]:
(12)
由上述分析可知,在已知动目标的初始概率分布及其一步转移概率的条件下就可以求得在有限时间和状态空间下目标运动预测概率分布。已知在第k次观测后,目标在网格j中的后验概率为pj(tk),tk+1-tk=mkΔt,mk≥0。假设tk时刻目标在网格j中,则目标在tk+1时刻移动到网格i中的概率为
(tk)=P{L(tk+mkΔt)=i|L(tk)=j}
(13)
由于目标必然在R中移动,则有
(tk)=1,j∈I
(14)
进一步可得第k+1次观测时目标存在于网格i的先验概率为
(tk)pj(tk)
(15)
综上,在解决面向多障碍物海面卫星搜索动目标问题时,根据卫星第k次过境探测信息更新搜索图后,再采用目标运动预测方法再一次更新搜索图,从而获得第k+1次卫星观测时目标在搜索图中的先验概率分布,以指导卫星观测。
3 仿真与分析
本节针对卫星搜索多障碍物海面动目标问题进行仿真实验。为验证本文方法效果,在搜索过程中目标运动预测环节将其与不采用目标运动预测方法,以及基于高斯分布的目标运动预测方法进行对比。其中不采用目标运动预测方法即搜索图在根据探测信息更新后不再基于目标运动预测进行更新;基于高斯分布的目标运动预测方法即在根据探测信息进行搜索图更新后再基于该方法进行搜索图更新。基于高斯分布的目标运动预测方法[8-9]假设目标速度为v,目标位置在x方向和y方向上保持独立。目标做匀速运动,将对目标运动的随机扰动视为方差为ξ的高斯白噪声。设tk时刻目标在(xk,yk),tk+1-tk=mkΔt,则tk+1时刻目标转移到(xk+1,yk+1)的概率分布服从高斯分布:
p{(xk+1,yk+1)|(xk,yk)}=
(16)
式中
(17)
(18)
(19)
针对这3种策略,以目标存在概率最大化为目标函数,确定成像卫星过境任务区域时所选观测条带。
(20)
实验建立目标任务区域如表1所示,并设定任务区域内有6个待搜索运动目标。
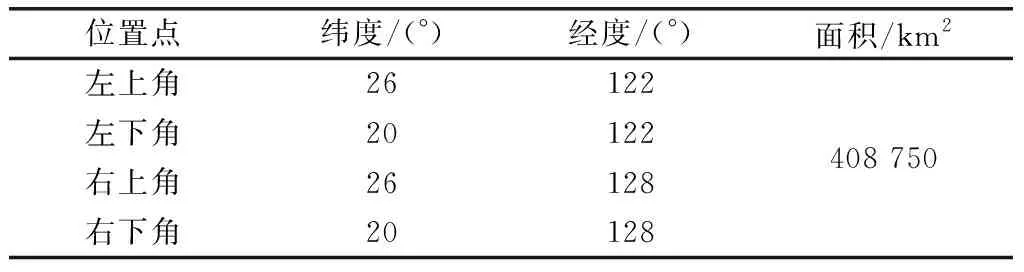
表1 任务区域位置
选取6颗卫星对任务区域内的目标进行搜索,卫星信息如表2所示。
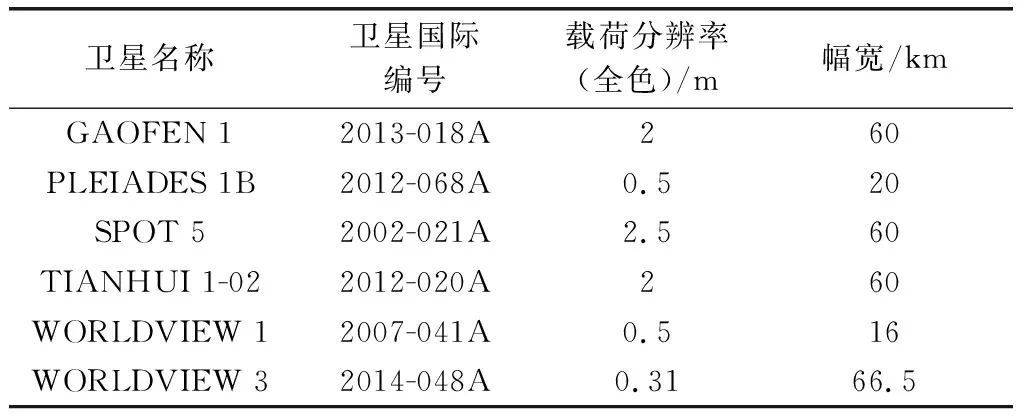
表2 卫星信息
设定卫星星载遥感器pd=0.85,pf=0.15,仿真时间段为[1 Aug 2017 12:00:00.000 UTCG,2 Aug 2017 12:00:00.000 UTCG]。计算得卫星在仿真时间段内共有9次过境任务区域,如表3所示。
3.1 方法可行性验证
将任务区域以0.1°的粒度划分为60×60的网格,并编号1~3 600。设定目标速度估计在10~15节,时间步长Δt=0.5 h。仿真开始前各网格目标存在概率设为0.5。通过随机生成的方法生成3组任务区域内的障碍物位置,使障碍物分别覆盖网格空间中的200、400、600个网格。在无障碍物以及障碍物分别覆盖200、400、600个网格4种情景下,在根据探测信息利用式(2)~式(5)进行搜索图更新的基础上,对不采用目标运动预测方法、采用基于高斯分布的目标运动预测方法、采用面向多障碍物搜索海面动目标运动预测方法3种策略分别设计了仿真实验,卫星搜索仿真实验过程如图4所示。每组实验重复100次,计算并比较了各策略下平均每个目标发现次数。仿真实验结果如图5所示。

表3 卫星过境任务区域时间窗信息
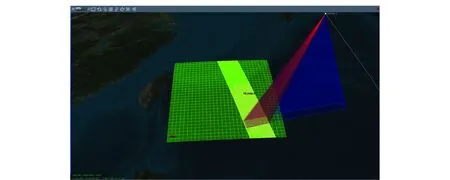
图4 卫星搜索仿真示意图Fig.4 Diagrammatic sketch of satellite search simulation
由图5仿真实验结果可得出以下结论:
(1) 与经验相符,无论任务区域内障碍物覆盖网格数量多少,不采用目标运动预测方法平均每个目标发现次数最少。这说明在卫星搜索动目标时进行目标运动预测能有效提高发现目标次数。
(2) 在任务区域障碍物覆盖网格数为0时,即平坦海面条件下,本文方法效果接近于常用的基于高斯分布的目标运动预测方法,且明显高于不采用目标运动预测方法,是可以接受的。随着环境中障碍物覆盖的网格数量增加,3种策略下平均每个目标发现次数都在增加。这是因为环境中障碍物的增加另一方面使目标在任务区域内的活动范围减小,因此更容易发现目标。但从增长速度上来看,不采用目标运动预测方法和采用基于高斯分布的目标运动预测方法增长速度大致相同,而采用本文方法平均每个目标发现次数快速增长,说明在卫星搜索多障碍物海面上航行的动目标问题上,采用本文方法做目标运动预测时卫星搜索效果更好。
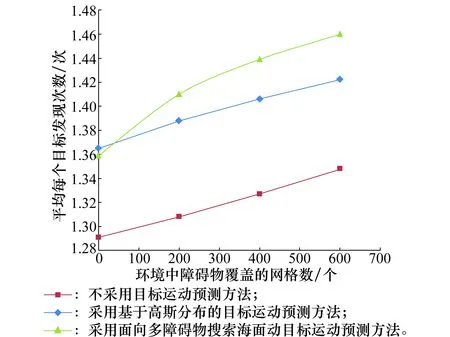
图5 不同障碍物规模下各策略平均每个目标发现次数Fig.5 Average number of target detection of per strategyunder different obstacle scales
3.2 方法效果分析
为分析搜索效果随卫星过境观测次数变化趋势,在环境中障碍物覆盖网格数为600的情况下,在根据探测信息进行搜索图更新的基础上,针对3种策略重复100次实验,计算平均发现目标个数随卫星过境任务区域次数的变化情况,如图6所示。
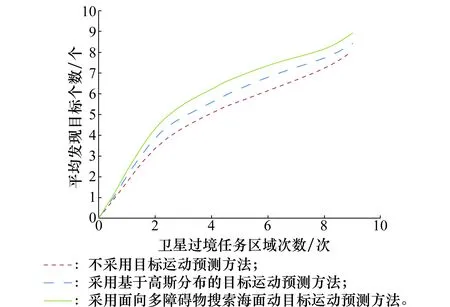
图6 平均目标发现个数随卫星过境次数变化Fig.6 Average number of target detection changes withsatellite transit times
由图6可知,随着卫星搜索的进行,采用本文方法相比于其他两种方法平均发现目标个数最多且增长速度较快。实验结果说明面向多障碍物海面条件下卫星搜索海上动目标时,在目标运动预测过程中采用本文方法能在有限的搜索机会下更多最快地搜索到目标,使有限的可用卫星资源得到充分的利用。
3.3 方法稳定性分析
在环境中障碍物覆盖600个网格的情形下针对3种策略进行100次仿真实验,统计各策略下每组实验发现目标次数,计算并比较各方法下发现目标次数平均值及方差,如表4所示。
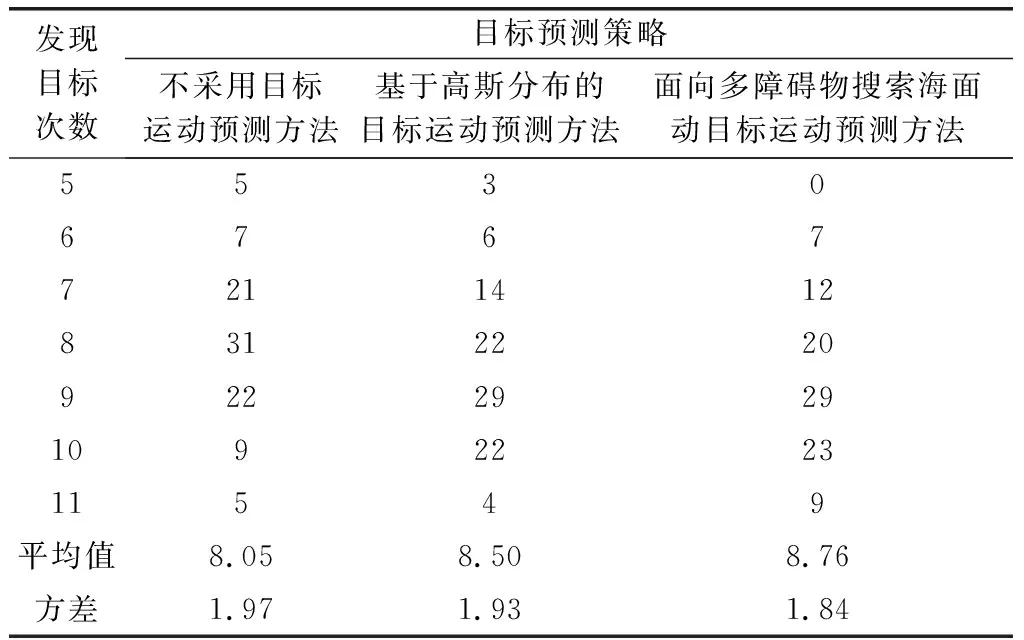
表4 目标发现次数频次统计表
由表4统计结果可知,在卫星搜索多障碍物海面动目标时本文方法具有更好的稳定性。
3.4 方法效率分析
海面动目标搜索一般具有较高的时敏性要求,搜索方法需能快速响应任务需求。为分析方法的效率,分别在不同的网格划分规模下,根据探测信息进行搜索图更新的基础上,针对3种策略进行实验。如表5所示记录了在网格划分规模分别为10×10,20×20,30×30,40×40,50×50,60×60下实验的耗时数据。
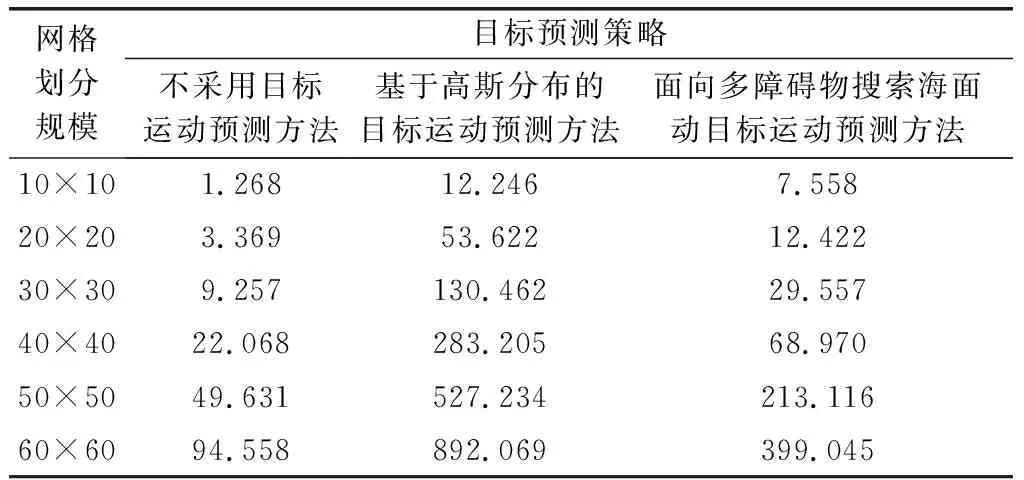
表5 目标运动预测方法实验耗时统计
由表5可知,随着网格划分规模的增加,各方法耗时都在增长。当不采用目标运动预测方法时,因缺少目标运动预测环节,实验耗时最少。但由上述方法可行性及方法效果分析可知,不进行目标运动预测时搜索效果最差。在采用目标运动预测的情况下,本文方法实验耗时明显小于采用基于高斯分布的目标运动预测方法,且随着网格划分规模的增加实验耗时差距更显著。结合上述方法效果和方法稳定性分析可得出,本文方法综合性能较优。
4 结 论
本文研究面向多障碍物海面卫星搜索动目标问题,为更有效地利用有限的卫星资源实现更多更快地搜索到海面动目标,本文使用搜索图建立多障碍物海面动目标搜索环境模型,并分析了目标规避海面障碍物对其运动的影响,提出一种基于目标马尔可夫运动特征的运动预测方法,用于计算目标转移概率。本文方法在已知搜索图中目标初始概率分布及一步转移概率的条件下可预测出有限时间和状态空间下目标运动概率分布,从而为卫星搜索提供目标环境信息。仿真实验结果验证了所提出的方法的可行性、有效性及稳定性,能较好地解决面向多障碍物海面卫星搜索动目标问题。