一种基于改进混合高斯模型的前景检测
2017-04-24罗向荣李其申
罗向荣 李其申
(南昌航空大学信息工程学院 江西 南昌 330000)
一种基于改进混合高斯模型的前景检测
罗向荣 李其申
(南昌航空大学信息工程学院 江西 南昌 330000)
针对传统混合高斯模型(GMM)前景目标检测运算量过大问题,提出一种基于改进混合高斯模型的前景检测算法(TGM)。通过基于历史信息的模型清理机制,减少背景稳定区域像素点的高斯分布数量,进而降低算法运算量;建立临时高斯分布,运用更简单的加减运算进一步减少运算量,最后将符合条件的临时高斯分布转化为正式高斯分布,避免模型无意义的频繁更新,提高了准确性。实验结果表明,改进后的算法与原算法相比,具有更好的实时性和很好的准确性。
前景目标检测 混合高斯模型 模型清理机制 临时高斯分布
0 引 言
Stauffer和Grimson[1-2]提出的基于混合高斯模型GMM的前景检测方法,是前景检测领域的经典算法和研究热点。GMM通过为每个像素点建立多个高斯模型,能够对背景进行很好的描述,但其算法复杂,运算量大,且背景模型收敛速度慢。针对这些问题,许多文章提出了改进方法。何亮明等人[3]提出了在模型更新过程中调整阈值的方法来降低单模态背景的误检率。邱联奎,刘启亮等人[4]通过对更新率和方差值进行改进及引入改进的三帧差分法得到更精确的运动目标。刘万军等人[5]提出的类间最大对称交叉熵阈值自适应选取方法和陈银[6]等人提出的结合mean shift原理的方法也是主要关注准确度。黄玉[7]等提出的基于YCbCr颜色空间GMM建模方法,李鸿生[8]等人提出的采用隔帧更新方式对模型中的参数进行更新的方法和白向峰[9]提出的以偏差均值作为GMM前景匹配阈值参数的方法虽然在一定程度上减少了GMM的运算量,但仍难以满足运动目标检测的实时性要求。
本文围绕减少传统GMM前景检测方法的冗余运算次数,提出模型清理机制和模型更新门槛,在保证算法准确性的同时,提高了算法的实时性。
1 混合高斯模型
混合高斯模型为图像的每个像素点建立N个高斯分布模型,以此描述该像素点可能存在的一个或多个背景值。N取值越大,越能描述复杂的图像,但运算量也越大,会影响到检测的实时性,因此一般取3~5。图像中一个像素点在一段时间内的变化表示为时间序列{X1,X2,…,Xt},该像素点的概率分布可以用下式表示:
(1)
其中K代表像素点的高斯分布个数,η代表一个高斯概率密度函数,且:
(2)


(3)
式中α为学习率,ρ=α/ωt-1,x,n为参数更新的学习因子。对其他高斯匹配则只进行权值衰减:
βt,x,n=ωt,x,n/δt,x,n
(4)
若Xt与所有高斯分布均不匹配,则令其为新的高斯分布加入模型或取代原模型中优先级βt,x,n=ωt,x,n/δt,x,n最小的高斯分布。完成参数更新后,按优先级β对高斯分布重新排序,根据下述公式取前B个高斯分布作为背景模型。
(5)
式中,T表示权重阈值。T值一般设定为0.75,T值过大会造成背景模型过多,漏检率增大,过低的话背景模型运算量降低,但会使背景简单化,甚至退化为单高斯模型。
由于传统GMM对每一帧的每个像素点均要进行大量复杂的运算,因此很难达到实时性要求。本文将通过模型清理机制,减少每一帧中参与GMM运算的高斯分布数量;通过设置更新门槛减少进行GMM更新的像素点数量。进而达到提升算法实时性的效果。
2 TGM模型清理机制
GMM为序列帧中的每个像素点都建立多个高斯分布,用于描述该像素点可能出现的多模态背景。但场景中一般有相当一部分区域的背景变化很少,如马路、建筑物等(简称背景稳定区域)。若对背景稳定区域也使用多个高斯分布进行背景描述,则其中涉及的参数更新、权值更新等对高斯分布进行调整的操作均属于冗余运算。因此采用模型清理机制,减少背景稳定区域的像素点高斯分布数量,达到减少算法运算量的目的。
设TGM在运行至第N帧时已达到相对稳定收敛,则背景稳定区域中的点Px,y应满足:
(6)
式中ωP,N,1表示点Px,y在第N帧时其高斯模型的第一个高斯分布的权值,nP,N,1表示点Px,y前N帧中与模型的第一个高斯分布匹配的次数,λ1、λ2为小于1的参数。此时场景中一些偶然发生的运动可能被写入到了其他权值很低的高斯分布中,因此对满足式(6)的像素点的冗余高斯分布进行清理。设点Px,y的第i个高斯分布的创建时间为第OP,i帧、上次匹配的时间为第LP,i帧、匹配总次数为nP,i,则在第N帧时对其进行清理的条件是:
(7)
式中λ3、λ4、f1、f2、f3均为常量参数。
模型清理的目的是删除陈旧的高斯分布,因此对近期建立的高斯分布和近期有过多次匹配的高斯分布不进行清理。为保证模型能稳定描述背景,每个像素点在一次模型清理中,至多有一个高斯分布可被清理。分布被清理后,重新计算剩余各分布的权值和优先级。若进行一次模型清理时,所有像素点的清理运算均集中于同一帧,则不同帧之间的运算量相差很大,为保证模型的鲁棒性,采用隔行清理的方法,将一次模型清理的运算均分至m帧中进行,m即为模型清理的周期。
3 TGM的临时高斯分布
在传统的GMM算法中,当像素点P与现有高斯分布均不匹配时,GMM将直接根据P点的像素值建立新的高斯分布。无论P点是前景目标还是背景噪声,该高斯分布均会参与后续的高斯分布匹配、参数运算更新、优先级排序等操作,增加大量的冗余运算。因此引入临时高斯分布机制,以避免将前景目标的像素值添加到新的高斯分布中。
采用临时高斯分布的目的是减少冗余运算并保证准确性,因此其应具有如下特点:组成结构简单、能进行有效的匹配和更新、不涉及复杂运算、易于转换为正式的高斯分布。
3.1 临时高斯分布的组成结构
临时高斯分布的组成如表1所示。通过表1可以看出临时高斯分布的组成简单,没有需要进行复杂运算的成员,有利于通过临时高斯分布减少模型运算量。

表1 临时高斯分布组成
3.2 临时高斯分布的运行机制
添加了临时高斯分布机制后模型在一帧内对一个像素点的核心处理流程如图1所示。临时高斯分布机制主要包括建立临时分布、匹配判定、更新临时分布和分布删除策略四个部分。当像素值与模型不匹配时并不直接进行复杂的模型更新,而是以临时分布的匹配更新作为替代。临时分布涉及的运算远简单于模型更新运算,因此能够减少像素值与模型不匹配时模型的运算量。

图1 一个像素点的核心处理流程
临时高斯分布的建立:在模型运行至第F帧时,建立像素点Px,y的第i个临时高斯分布的运算如下:
(8)
式中,XP,F表示点Px,y在第F帧时的像素值,σP,1,F-1为点Px,y在第F-1帧时模型中优先级最高的高斯分布的标准差,λ5为阈值系数。

(9)
与GMM的模型匹配、更新相比,临时分布的匹配、更新只涉及简单的加减法和大小比较,且没有权值运算和优先级运算等操作,具有更小的运算开销。为避免将运动目标判定为背景,无论像素值是否与临时分布匹配,均认为该像素点是前景点。
临时分布的删除和转换 对临时分布进行删除操作的情况有两种,一种是临时分布数量已满且需要建立新的临时分布时,从临时分布中选择最不可能为背景描述的分布进行删除(选择删除);另一种是临时分布在更新过程中达到了被删除的条件(条件删除)。
(10)
式中λ6为权值系数。转换完成后,根据新增分布的参数,对点Px,y的高斯分布进行权值、优先级、高斯分布的排列顺序等进行调整;若高斯分布数量已达上限,则先删除优先级最低的高斯分布后再进行上述调整。
4 实验结果与分析
本文主要进行室内、室外简单场景和室外复杂场景三种场景进行实验。实验用计算机CPU为Pentium(R)双核3.2GHz,内存为2GB。实验从前景检测结果的准确性和运行速度上对改进后的算法和经典GMM算法进行了比较。
4.1 参数表
本文算法的主要参数如表2所示。

表2 算法主要参数
4.2 性能比较与分析
本算法添加了模型清理机制和临时高斯分布,当背景相对简单,没有过多干扰时,由于不需要对原高斯分布中各个参量进行复杂运算,而是在临时高斯分布中进行简单的加减运算,算法的速度也有很大提升。但当背景复杂,扰动较多时,由于过多地建立临时高斯分布,运算速度的提升则没那么明显。由于前60帧是初始化建模过程,本算法TGM与原GMM算法的运行速度相当,但在后面帧数的处理上,处理速度优势逐渐显现出来,具体处理数据如表3及图2所示。图2中的三组数据对比的场景分别是室内、场外起风场景和场外静态场景,视频分辨率分别为720×1 280、1 280×720、1 280×960。
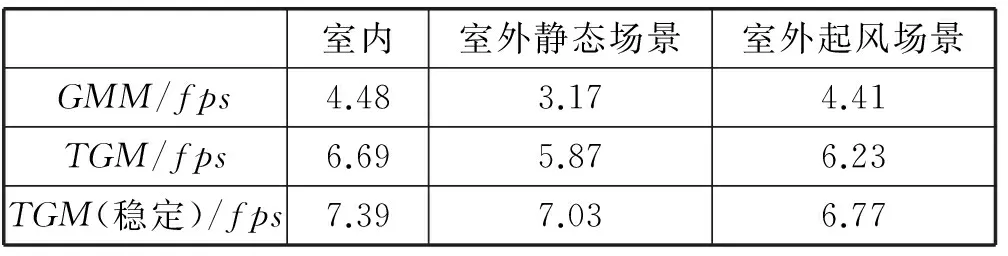
表3 算法速度比较

图2 本算法(TGM)和传统GMM算法在各种场景中的处理速度
本算法通过建立模型清理机制,评估稳定区域,对这部分区域进行多余高斯分布的清理,虽然会将少数前景目标误删,但很大程度上减少了运算量。为了保证算法的准确度,我们对近期建立的高斯分布不予清理。表4为本算法与原GMM算法的准确度比较,可以看出,算法的准确度仍然十分可观。

表4 算法准确度比较 %
4.3 实验效果图
图3-图5分别为室内、室外起风和室外静态场景的实验效果图。在室内场景中,由于背景十分稳定,本算法的检测结果跟原算法几乎一样,效果都非常好。在室外静态和起风场景中,本算法在完整度上比传统GMM算法要稍好一些,但在起风场景中,对树叶扰动的处理也不是很理想,出现了很多噪声。

图3 室内检测结果

图4 室外大风场景检测结果

图5 室外静态场景检测结果
5 结 语
针对传统混合高斯前景目标检测算法运算复杂、耗时长的问题,提出了一种通过建立模型清理机制和临时高斯分布的新算法。实验表明,该算法在对视频帧处理的速度上有了很大的提升,检测出的目标完整度也更好,但对扰动较大的目标处理结果仍不尽人意。未来的工作重心将会放在对噪声的处理上。
[1] Stauffer C,Grimson W E L.Adaptive background mixture models for real-time tracking[C]//Computer Vision and Pattern Recognition,1999.IEEE Computer Society Conference on.IEEE,1999,2.
[2] Zivkovic Z.Improved adaptive Gaussian mixture model for background subtraction[C]//Pattern Recognition,2004.ICPR 2004.Proceedings of the 17th International Conference on.IEEE,2004,2:28-31.
[3] 何亮明.动态场景中的改进混合高斯背景模型[D].上海:中国科学院上海微系统与信息技术研究所,2012.
[4] 邱联奎,刘启亮,赵予龙,等.混合高斯背景模型目标检测的一种改进算法[J].计算机仿真,2014,31(5):378-392.
[5] 刘万军,李琳.基于熵理论改进混合高斯模型的运动目标检测算法[J].计算机应用研究,2015,32(7):2226-2229.
[6] 陈银,任侃,顾国华,等.基于改进的单高斯背景模型运动目标检测算法[J].中国激光,2014,41(11):239-247.
[7] 黄玉,殷苌茗,周书仁.基于YCbCr的自适应混合高斯模型背景建模[J].计算机工程与科学,2015,37(1):152-156.
[8] 李鸿生,薛月菊,黄晓琳,等.改进的自适应混合高斯前景检测方法[J].计算机应用,2013,33(9):2610-2613.
[9] 白向峰,李艾华,李喜来,等.新型背景混合高斯模型[J].中国图象图形学报,2011,16(6):983-988.
A FOREGROUD DETECTION BASED ON IMPROVED GAUSSIAN MIXTURE MODEL
Luo Xiangrong Li Qishen
(CollegeofInformationEngineering,NanchangHangkongUniversity,Nanchang330000,Jiangxi,China)
A new algorithm (TGM) for foreground detection is proposed based on improved Gaussian Mixture Model to solve the problem of huge computation of classic Gaussian Mixture Model (GGM). The quantity of Gaussian distribution of the pixels in background stability region is decreased and the computation is reduced based on the Model clean-up mechanism of historical information. Besides, the temporary Gaussian distribution is built and the easier modified operation is utilized to further reduce computation. At the last, the temporary Gaussian models which match the conditions are turned into official Gaussian models to avoid updating models meaninglessly and improve veracity. Experimental results show that the improved algorithm is feasible with better instantaneity and veracity.
Foreground detection Gaussian Mixture Model Model clean-up mechanism Temporary Gaussian distribution
2016-01-08。江西省自然科学基金项目(YC2014-S394)。罗向荣,硕士生,主研领域:图像处理。李其申,副教授。
TP301.6
A
10.3969/j.issn.1000-386x.2017.04.040
