液压机械自动控制器的改进设计与实现
2018-09-01黄力刚
黄力刚
(河南工业职业技术学院机械工程学院,河南 南阳 473000)
改革开放后,我国各行业进入快速发展时期。在此背景下,液压机械控制器出现在人们的视野中。它是液压技术的一个新分支,是控制工程领域的一个重要组成部分[1],发展至今已经有50多年的历史了,且经过几代人的不懈努力,在控制领域有所成就,具有高精度、高响应等优点,基本满足了工程发展的需求。随着科学技术和生产的迅速发展,人们对传统液压机械自动控制器的要求不断提高,使得其局限性越来越显著。目前我国使用的液压机械自动控制器大多是在PID算法的指导下设计的[2],在鲁棒性方面存在很大的缺陷,导致对控制器的振动控制效果不太好,经常出现管道破裂、密封损坏、油液污染和外泄浪费、液压元件损坏等[3]。情况严重时,甚至会导致停工停产,影响企业正常的生产活动。因此,改进我国液压机械自动控制器迫在眉睫,而H∞控制算法的出现,为其提供了发展契机。本文以H∞控制算法代替传统的PID算法,以此来设计一个液压机械自动控制器,并为验证该控制器在鲁棒性方面确实有效果,进行了仿真实验。
1 液压机械自动控制器的设计原理
液压机械自动控制器是以(静)液压控制与换能元件为主要控制元件构建的控制器。液压控制 与换能元件通常指液压控制阀、控制用液压泵等,其优点是改善技术性能、有效控制噪声等。液压传动装置的体积小、质量轻、运动惯量小、动态性能好、运动平稳,实现了自动工作循环和自动过载保护[4-6]。液压机械自动控制器由7个部件组成:节气门阀、手动阀、速控阀、油泵、主调压阀、副调压阀和换挡阀等。其工作原理如图1所示。

图1 液压机械自动控制器工作原理
2 液压系统结构及数学模型
在实验室模拟实际工业现场的液压机械自动控制系统,其结构如图2所示。
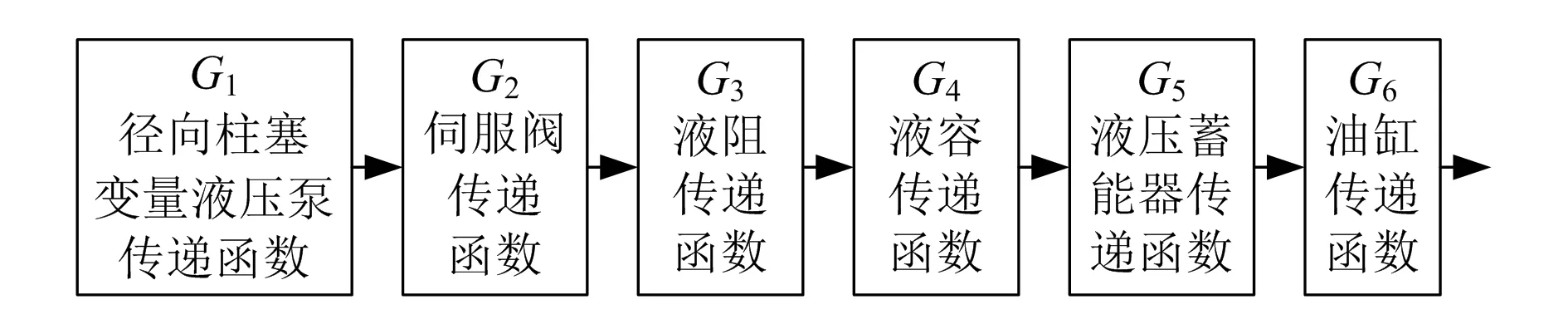
图2 系统结构框图
从模拟的工业现场来看,液压机械自动控制系统必须在命令传递到油缸G6前截取压力信号[7],并以此作为反馈信号。因此该系统的开环传递函数G(S)不包括油缸环节G6,即G(S)=G1·G2·G3·G4·G5,代入数据得:
(1)
式中:S为油缸饱和压力。
假设不考虑其他环节,只看油泵出口到油缸入口这一段,其传递函数G*(S)为:
(2)
图3、图4分别传递函数为G(S)和G*(S)的开环系统波德图、开环系统阶跃响应图和开环系统脉冲响应图。图中:L表示幅频特性的幅值,y表示响应的幅值,θ表示油缸端面压力角,t表示运行时间,f表示频率。

图3 传递函数为G(S)的开环系统响应图
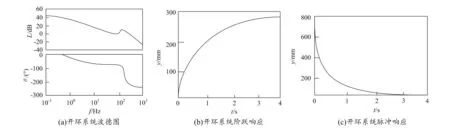
图4 传递函数为G*(S)的开环系统响应图
从图3和图4可知,液压泵是影响系统阶跃响应和脉冲响应稳定的主要元素。当液压泵环节被纳入考虑范围内时,二者是稳定的;当液压泵环节不被纳入考虑范围内时,前者仍然可以保持稳定,而后者会出现振荡现象。以上结论证明:系统缺乏对脉冲型干扰的抵抗力[8-10],即造成这种现象的主要祸首是脉冲型干扰,而不是阶跃型干扰。
在以上分析的基础上,可以把减小系统振动的方法总结为以下步骤:首先,选择或设计能控制蓄能器影响的液压泵器;其次,加大蓄能器的阻尼比系数;最后,控制器对闭环进行有效控制。
因此本文利用H∞控制算法设计液压机械自动控制器,减小因脉冲型干扰引起的振动频率。
3 H∞控制器
根据式 (2),可得H∞控制器状态空间中传递函数G*(S)为:
C=[0 0 1.67×107]
D=0
式中:A,B,C,D分别为状态矩阵、输入矩阵、输出矩阵和直接转移矩阵。
由图4(c)可知,传统的液压机械自动控制器对脉冲响应具有振荡作用。现设计基于H∞控制算法的液压机械自动控制器,旨在减少脉冲响应振动,使其达到稳定状态。
选择灵敏度权重函数:
(3)
选择补灵敏度权重函数:
(4)
二者权重函数曲线如图5所示。

图5 权重函数曲线图
由式(3)和式(4)求得H∞控制器的状态矩阵、输入矩阵、输出矩阵和直接转移矩阵变化为Acp,Bcp,Ccp,Dcp:
Dcp=0.025
在H∞算法下的液压机械自动控制器的闭环系统阶跃响应如图6所示,闭环系统脉冲响应如图7所示,图中k为开环放大系数。从两个图中可以看出该控制器的输出曲线稳定,振荡较小,说明其是成功有效的。
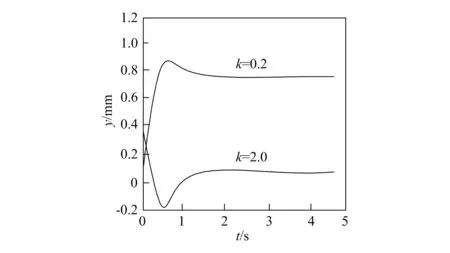
图6 闭环系统的阶跃响应

图7 闭环系统的脉冲响应
4 液压机械自动控制器的仿真实验
在设计完成新型的液压机械自动控制器后,需要进行仿真实验以验证其鲁棒性。首先把G*(S)的内部参数进行人为变动,以此来模拟内部参数的漂移,对变动后的系统用新型液压机械自动控制器进行控制。此时G*(S)为:
C=[0 0 0 1.67×107]
D=0
由式(5)和(6)绘制权重函数曲线(图8),然后与原G*(S)进行对比,发现A矩阵变化较大,其余不变。用新型液压机械自动控制器进行控制后,其闭环系统阶跃响应如图9所示,对比图6和图9以及图7和图10可以看出,改进后的液压机械自动控制器对G*(S)内部参数的漂移具有良好的鲁棒性。
(5)
(6)
5 结束语
本文为满足生产、生活的需要,弥补传统液压机械自动控制器在鲁棒性方面存在的缺陷,对液压机械自动控制器的算法进行了创新,以H∞控制算法代替PID算法,设计了液压机械自动控制器,经验证其能很好地抑制系统振动,使系统在运行时达到平稳状态,具有较强的鲁棒性。本文的研究对类似控制器的设计具有一定的借鉴意义。
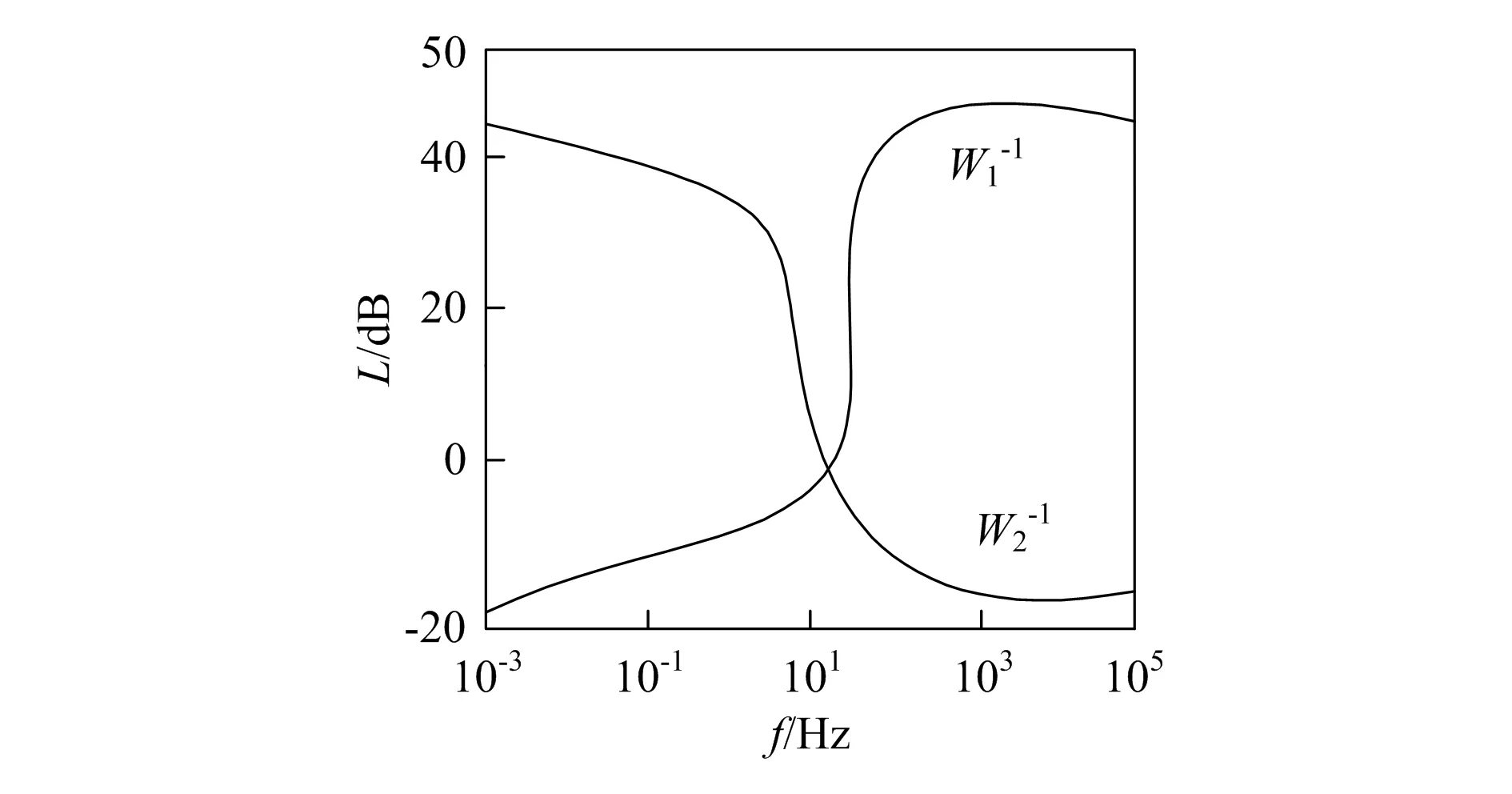
图8 权重函数曲线图

图9 闭环系统的阶跃响应
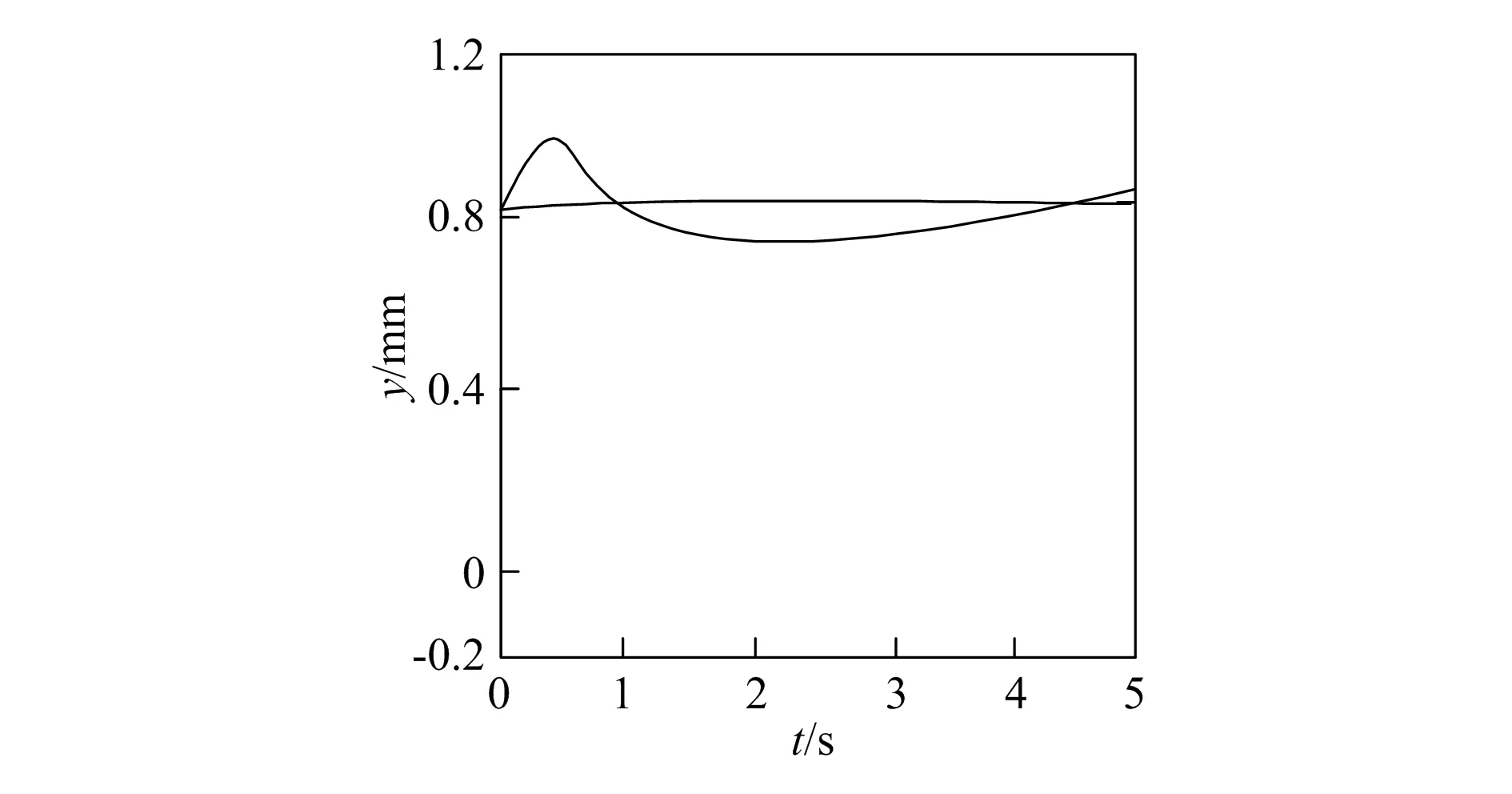
图10 闭环系统的脉冲响应
