基于红外延时相位算法的车辆超高检测仪设计
2018-09-01毕恩兴
史 骏,毕恩兴
(西安铁路职业技术学院,陕西 西安 710026)
随着我国大型货车保有量的逐年增加,大型货车卡桥、撞桥事故的发生率日渐增高。尽管目前交通部门已经在限高路段采用了限高标志等措施,但是由于司机的人为疏忽、车辆行驶环境复杂等原因,车辆超高所造成的交通事故仍时有发生。因此对车辆高度进行监控是城市交通管理的必要环节[1-2]。有关车辆超高检测仪的设计,研究人员已经做了大量卓有成效的工作,文献[3]、[4]、[5]中的车辆超高检测仪使用了单点式报警系统,文献[6]、[7]中采用的单点反射式激光测距系统可以完成对车辆宽度和高度的测量,文献[8]中采用的激光式传感器阵列可以测量车辆超高高度,文献[9]、[10]、[11]、[12]则是采用识别数字图像的方式。摄像头可以实时记录车辆在运行中的图像,但是相对于采用激光传感器与红外传感器的检测方式,需要一套复杂的数字图像处理算法,而且安装维护时还需要在现场进行复杂的系统软、硬件调试工作。在夜晚或能见度不好的情况下该系统的识别率不高。激光传感器虽然测量准确,但是在高温环境下容易光衰、损坏,由此造成维护成本升高、稳定性变差。鉴于以上激光传感器与摄像头的缺点,本文采用红外对射式传感器阵列设计车辆超高检测系统,以期降低设备的调试、安装与维护成本,提高设备的稳定性。
1 车辆超高检测系统总体设计
1.1 高度检测原理研究
红外对射式传感器是成对使用的,当物体遮挡住接收传感器时,被遮挡接收传感器的输出信号会发生变化,从而可以根据接收传感器的状态判断遮挡物的位置。红外对射式传感器阵列结构如图1所示。

图1 红外对射式传感器阵列示意图
理想状况下可以通过接收传感器的状态判断遮挡物体的位置,从而计算物体的实际高度,此时物体高度的测量精度主要由传感器的机械安装精度即垂直安装方向上的传感器距离ΔH决定。但是红外光源相对于激光光源有着发散的特性,此种阵列安装方式会导致传感器光源的交叠干扰,如图2所示。因此在采用该种测量方法时,实际测量误差远大于ΔH所造成的误差,简单依靠接收传感器的状态判断遮挡物体高度的传统方法是不可行的[13]。
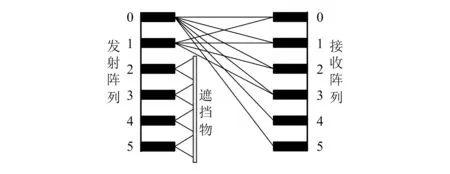
图2 交叠干扰现象
1.2 车辆超高检测系统设计方案
车辆超高检测系统一般应用于高速公路的超限检测站附近,日光干扰、高温等因素是导致测量系统发生故障的主要原因。在本设计中采用红外对射式光电传感器阵列和软件算法解决了红外光交叠干扰的问题,车辆超高检测系统的示意图如图3所示。
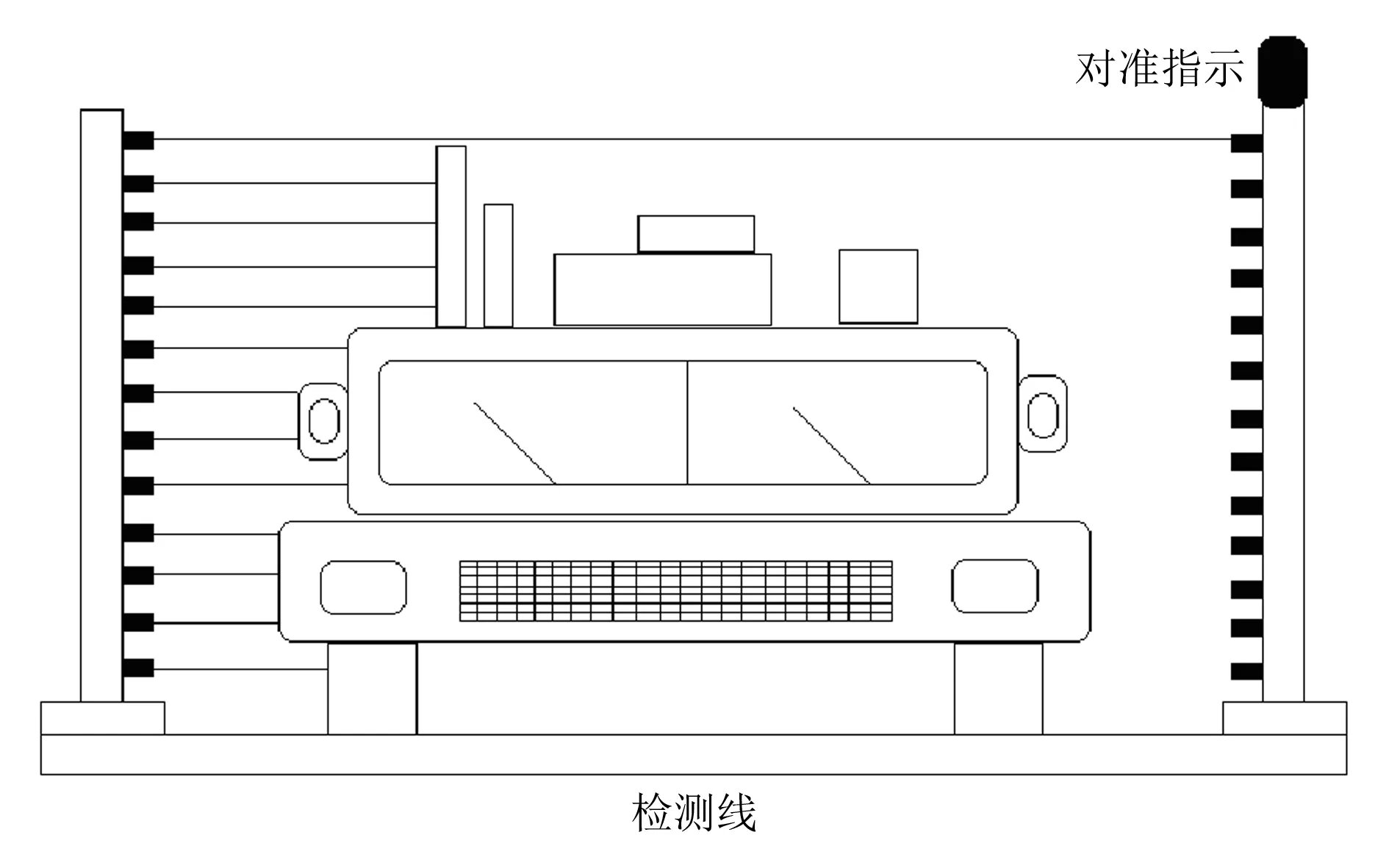
图3 车辆超高检测系统示意图
2 车辆超高检测系统硬件设计
2.1 硬件总体设计
硬件电路总体设计如图4所示。测量架的基准高度为4.5m,为了能够测量4.5m~4.8m车辆的精确高度,发射传感器和接收传感器阵列都采用六路传感器,并且相邻的传感器之间的距离为5cm,测量长度为30cm。信号处理电路采用光电耦合器设计,完成了光电信号的转换。通过多谐振荡 器、单稳态触发电路、低通滤波器完成了对光信号的调制和解调,实现了抗日光干扰的功能。发射模块单片机利用延时相位算法通过光电耦合器完成了多谐振荡器电源的控制功能。接收模块单片机对接收到的脉冲信号长度进行测量,并完成了高度计算功能。

图4 车辆超高检测系统硬件原理框图
2.2 光调制解调原理
光脉冲信号的发射由多谐振荡器控制,信号的输出脉冲宽度为T1。接收端为单稳态触发器,只有不连续的光脉冲信号才能使单稳态触发器输出固定宽度为T2的脉冲信号。日常光为连续信号,因此无法连续触发单稳态触发器,可以起到抗日光干扰的作用。具体的光调制与解调原理如图5所示。

图5 光调制与解调原理
3 车辆超高检测系统软件设计
3.1 延时相位算法原理
红外光相对于激光具有发散的特性,虽然可以通过在接收传感器上额外增加透镜,使发散效果减弱,但是在对射距离较远且相邻传感器距离较小的情况下,接收传感器之间的交叠干扰现象仍十分严重。因此在程序设计中提出了基于脉冲延时的信号处理算法来克服接收传感器之间的交叠干扰。脉冲延时算法,即采用延时的方法使发射传感器的信号依次延时Te发出,并产生高电平恒定时间为Tn的脉冲,当无障碍物遮挡时,多个发射传感器信号的叠加会使接收传感器的高电平持续时间为恒定最大值;当有障碍物遮挡发射传感器时,高电平的持续时间Tx将会缩短[14]。发射和接收效果如图6所示。可以通过测量接收传感器高电平信号的持续时间来判断接收传感器是否被遮挡,从而判断遮挡物的实际位置。
接收传感器对光信号进行接收,由单片机对接收到的脉冲长度进行测量,如果接收脉冲长度比无 遮挡情况下的最大值小,则说明有遮挡情况发生。

图6 发射与接收波形
如图6所示,可以通过比较接收光信号Tx与标准脉冲信号Tn的长度来判断传感器的遮挡情况,具体的计算公式如式(1)所示。
Tx-Tn=n·Te
(1)
式中:Tx为接收传感器的高电平持续时间;Tn为标准脉冲宽度高电平的持续时间;Te为相邻传感器脉冲的信号延时时差;n为未被遮挡的传感器数目。如果n的值与传感器总数相同,则该设备未被遮挡;如果n小于传感器总数,则表明有物体遮挡传感器阵列。物体的高度计算公式如式(2)所示。
H=(N-n)·ΔH
(2)
式中:H为物体高度;N为传感器数量;ΔH为传感器的相邻距离。由式(2)可知,物体测量的误差与传感器安装精度ΔH紧密相关。
3.2 脉冲宽度测量算法设计
通过对延时相位算法脉冲波形的分析可知,当有遮挡物时接收脉冲宽度会变小。因此可以通过对接收脉冲宽度的测量得出被遮挡的传感器数目,并通过传感器的相邻安装距离计算出物体的实际高度。
已知未被遮挡时的脉冲宽度为LN,被遮挡1个传感器时的脉冲宽度为LN-1,则相位延时算法中的标准单位脉冲减少量dec为:
dec=LN-LN-1
(3)
假设被遮挡了X个传感器时的脉冲宽度为LN-X,则被遮挡的传感器数目X为:
X=(LN-LN-X)/dec
(4)
则实际车辆的高度H为:
H=Hb+X·S
(5)
式中:Hb为基准高度;S为传感器间距。具体的程序流程图如图7所示。
4 误差测量与分析
采用标准遮挡物对车辆超高系统进行测试,具体的测试方法如图8所示。通过改变遮挡物与发射传感器阵列之间的距离D,将测得物体高度值HT与标准值Hx进行比较,并分析测量误差与距离D之间的关系,可以得出减小物体高度测量误差的方法。具体的误差分析如图9所示。图中纵坐标的误差为[(HX-HT)/HX]×100%。

图7 脉冲宽度测量算法流程图
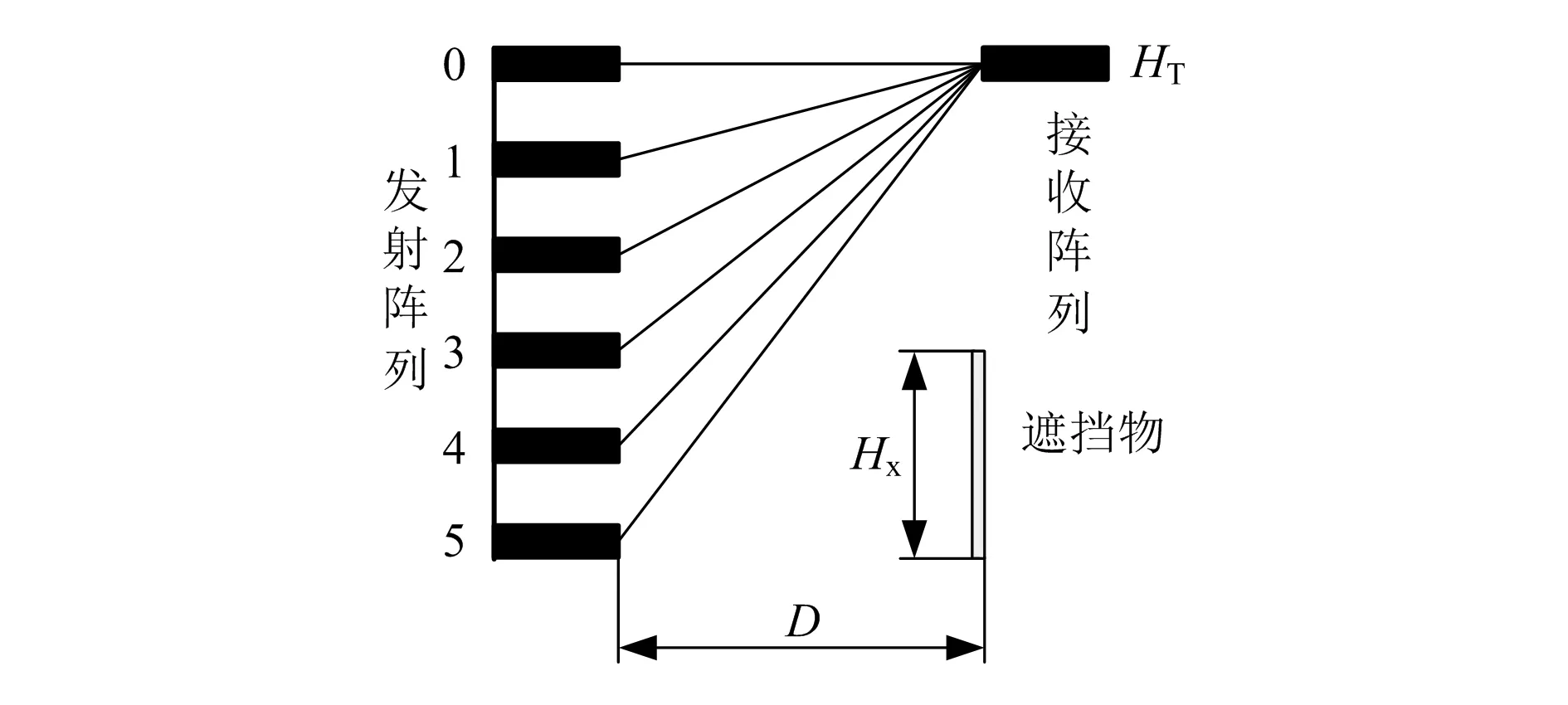
图8 车辆超高系统测试方法
根据国标可知普通车辆宽度应小于等于2 500 mm,因此在测试中采用厚度为10mm的泡沫板在0mm~2 500mm宽度范围内对系统进行测试,误差曲线如图9所示。图中,在距离D超过1 250mm时误差接近100%;待测物体越靠近发射端误差越小。由此可知,在发射传感器与接收传感器距离为2 500mm的情况下,车辆越靠近发射端时该测量系统的误差越小。因此实际使用时,待测车辆应尽量靠近发射端以减小测量误差。车辆的宽度范围一般为1 600mm~1 800mm,红外相位延迟算法的误差可以满足实际测量要求。

图9 误差分析
5 结束语
本文针对现有车辆超高检测仪成本高、环境适应性差、软件设计复杂、安装调试困难等问题,采用多谐振荡器与单稳态触发器设计信号处理电路,克服了红外光容易受到日光干扰的缺点;采用红外延时算法克服了红外光交叠干扰的缺点,以较低的传感器成本及合理的安装精度实现了车辆超高高度检测的功能。最后在2 500mm的范围内对设备的测量误差进行了实验分析,实验结果表明待测车辆越靠近传感器发射端测量误差越小,该红外式车辆超高检测仪可以满足实际测量的要求。
