新型平面四爪微夹持器的设计与分析*
2018-06-07陈庭辉
尹 磊,唐 军,陈庭辉
(江西理工大学 机电工程学院,江西 赣州 341000)
0 引言
微夹持器作为一种末端执行器[1-3]广泛应用于微机电系统(MEMS)、生物医疗和微纳操作等精密工程领域。国内外众多学者对微夹持器的结构设计及应用进行了大量的研究,尤其在一些微机电领域,微夹持器可以用来抓取和装配微构件[4-5]。郝永平等[4]设计了一种用于MEMS机构装配的微夹持器,实现了夹持器中众多微小器件的高效装配保证了夹取的稳定性。余大海等[5]设计了一种适用于ICF靶夹持的多用微夹持器,实现了各种不同形状夹口的调换和不同夹口初始开口间距的自由调整以满足不同靶件的夹持要求;而在生物工程方面,微夹持器可以用来抓取移动细胞,对细胞进行微操作。R Zhang 等[6]提出的用于生物微操作的电热微夹持器,实现了一种具有大夹紧范围和多用途颌骨的电热夹,其闭合和张开颚的响应时间约0.23s,颚间隙71.5μm的大范围变化能力可作为生物微操操作的多用途机械手。为了预测和控制夹持力的大小,一些学者也通过不同的方式对微夹持器的夹持力作了一定的研究[7-11]。
当前,大多数文献对微夹持器的研究仍主要集中在平面结构设计方面,且夹持形式均为两点接触,较好实现了单自由度方向的夹持。由于微夹持器两点接触式的平面夹持易失稳,容易脱落造成破坏和损伤。为了提高其可靠性,本文采用桥式放大和杠杆放大原理设计一种新型的具有平面四点接触的微夹持器,对其建立了几何模型和数学模型,并利用有限元软件Ansysworkbench进行有限元仿真,探讨多点式微型夹持器的稳定性和夹持响应速度。
1 微夹持器的结构设计
采用桥式放大及杠杆放大原理设计一种能实现四点接触式的平面夹持微夹持器,且为了提高其刚度和固有频率,微夹持器结构设计在同一平面且为对称结构。
内部支链采用差动式二级杠杆放大结构,外部两个支链采用桥式放大和一级杠杆放大组合结构,整个结构是完全对称,设计原理如图1所示,图1中各柔性铰链用字母A、B、C、D、E、G、H、J、M、N表示,杆件用Ⅰ、Ⅱ、Ⅲ、Ⅳ、Ⅴ、Ⅵ 表示,具体为:杆I的中点I为微夹持器的输入端,通过压电陶瓷进行驱动,O点为夹持器的夹持端,A、E、M为固定转动副,B、C、D、G、H、J、M、N分别表示转动副。对于外部两个支链来说,点A与B、C、D、I采用桥式放大原理构成了一级放大,A为固定端,I相当于输入端,则I点位移得到放大后的位移得到N点位移;点M与N、O形成了二级放大,M为支点,输出端O点的位移是由I点的位移经二级放大得到。对于中间内部两条支链来说,采用二级级杠杆放大结构进行位移的放大,首先E为支点,将输入端I的位移放大得到H点的位移,输出端O点的位移是以J为支点将由H点的位移经过二级放大得到。其中,柔性铰链M、N、J处的转动副采用直角形铰链,其余柔性铰链均采用直圆型柔性铰链。根据此原理,当在驱动端进行驱动时,一个驱动可以同时驱动四个支链实现目标物的夹持动作,微夹持器的初始结构参数如表1所示。
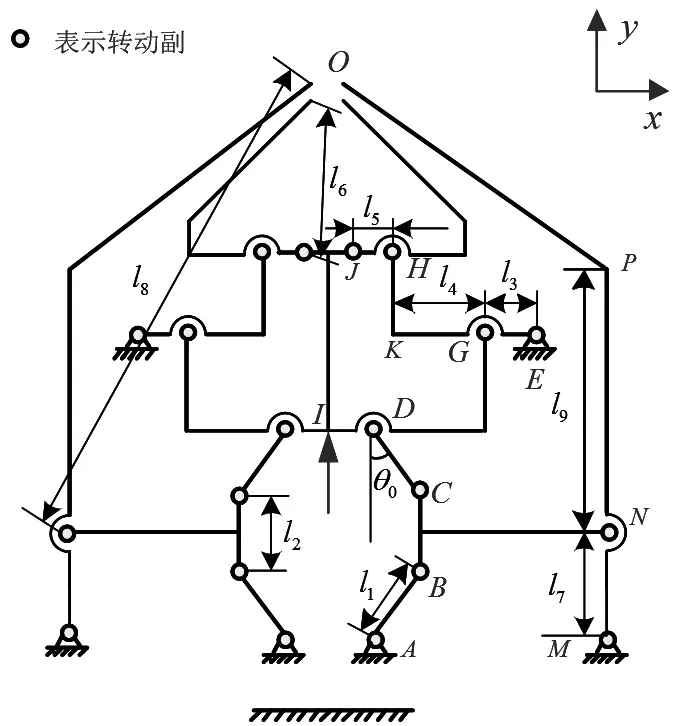
图1 微夹持器设计原理图

图2 微夹持器

参数数值参数数值参数数值l118l212l39l49.5l57l618l742l8118.2l952.3r2.25b10t0.5θ015°
根据图1所示的设计原理设计微夹持器如图2所示,整个微夹持器采用结构紧凑的对称式结构,以提高其整体刚度和固有频率。
2 微夹持器放大倍数数学模型
微夹持器的放大倍数反映了其夹持范围的大小可以表示为:
A=ΔyI/Δyo
式中,Δyo为输出端的位移,ΔyI为驱动端的位移。对于该微夹持器来说,有四个夹持支链组成,且两两相同,故下面分别对两个支链进行分析。
2.1 内部支链的计算
微夹持器的内部支链设计原理如图3所示,杆I的中点I为夹持器的输入端,杆VI的O点为夹持口,字母E、G、K、H、J分别表示转动副。点I与E、G、K、H组成了一级放大,E为杠杆的支点,设I点位移为yI,则H点位移得到放大,其位移为:
yH=(1+l4/l3)yI
(1)
式中,l3和l4分别为EG和GK段的长度。
点I与J、H、O形成二级放大,O点的位移是由H点的位移经二级放大,点O的位移为:
yO=(1+l6/l5)yE=(1+l6/l5)(1+l4/l3)yI
(2)
式中,l5为HJ长度,l6为点O到点E的距离,l6>l5。由式可知,输出端O点的位移可得到放大。其放大倍数A1为:
(3)

图3 内部支链结构图
2.2 外部支链的计算
首先,对外链的第一级的桥式放大机构的放大倍数A21进行计算,原理图如图4所示。其中A端是固定端,D端是移动端(驱动端),BC杆为输出端,在驱动端施加输入位移Δx,则在输出端的输出位移为Δy,其中,虚线是变形前的位置,实线是运动后的位置。

图4 桥式机构示意图
由图4可知,桥式机构变形前后满足如下几何关系。
在x方向上满足:
2l1cosθ0+l2+Δx=2l1cosθ+l2
(4)
在y方向上满足:
l1sinθ+Δy=l1sinθ0
(5)
则桥式机构的放大倍数A21为:
(6)
当桥式机构的初始角度为θ0=15°,杆长l1=18mm时,代入式和式可得当驱动端位移从0~0.4mm时的放大倍数,经计算可以得到放大倍数约为2。
2.3 二级杠杆的计算
对第二级杠杆放大机构的放大倍数A22进行计算,原理图如图5所示。该部分是杠杆放大机构,其中N为输入端,M为固定端,O为输出端,在输入端施加位移Δy2,杆件以M为支点进行转动,则在输出端O的位移为Δy,虚线为变形前位置,实线为变形后位置。

图5 杠杆机构示意图
由图5可以求得外链二级杠杆放大机构的放大倍数A22为:
(7)
由表1可知:A22=(l7+l8)/l7=3.81。
则外部支链总的放大倍数A2为:
A2=A21A22
(8)
将A21和A22代入式可得放大倍数约为7.62。
3 有限元仿真分析
有限元法能够精确反映夹持器指标和结构参数的非线性关系,尤其是输入和输出之间为高度非线性关系时,采用有限元仿真能够较为准确地预测分析机构在边界条件下的响应,为了验证所建伪刚体模型的准确性,采用有限元软件仿真进行对比。
在Ansysworkbench有限元软件中建立该柔性微夹持器的有限元模型,有限元模型选用solid186单元。为了模拟该柔性微夹持器的真实运动情况,需对该有限元模型施加边界条件,对夹持器结构的定位孔施加固定约束条件,对桥式机构的上部滑块部分施加竖直方向的位移约束条件。
所设计的微夹持器材料选用铝合金,其具体型号AL-7075,其弹性模量E为71GPa,泊松比σ为0.3,密度为2770kg/m3。
3.1 放大倍数分析
首先对该夹持器进行放大倍数的有限元分析,对有限元模型采用自由网格方式划分网格后,沿着竖直方向施加0.1mm的输入位移边界条件,然后进行求解最后得到仿真后的夹持器整体变形云图结果如图6a所示,可以看到在夹持器的输出端的输出位移达到约0.73mm,即说明该夹持器实际放大倍数约为7.3,与理论放大倍数7.62相差不大,说明设计的可行性。由6b图可知,理论结果与仿真分析结果接近,误差不超过5%。说明了理论模型的合理性。

(a)放大倍数仿真分析

(b)输入与输出位移关系曲线图6 放大倍数分析
3.2 固有频率分析
微夹持器的响应速度能够用其固有频率f来反映,固有频率越大,表示其响应速度越快,可用Ansysworkbench中的模态分析模块来进行模态分析获得其相应振型状态下固有频率f。
在Ansysworkbench中的Modal模块进行夹持器的模态分析,提取前6阶模态分析结果,其中只有第三阶模态分析的振型与期望的运动状态相符,其结果如图7所示,其固有频率为278.63Hz,说明该夹持器具有较快的响应速度。

图7 固有频率仿真分析
3.3 最大应力分析
为了保证微夹持器在夹持操作的运动过程中,其最大应力不超过材料的屈服强度而导致断裂等破坏现象,需要对其进行应力分析。在Ansys中进行应力分析,其结果如图8所示。可以看出该夹持器的最大应力发生在桥式放大机构的中间的一个柔性铰链部位,其最大应力为359.07MPa。而AL-7075的屈服强度为455MPa,故不超过其许用应力,能够满足应力要求。
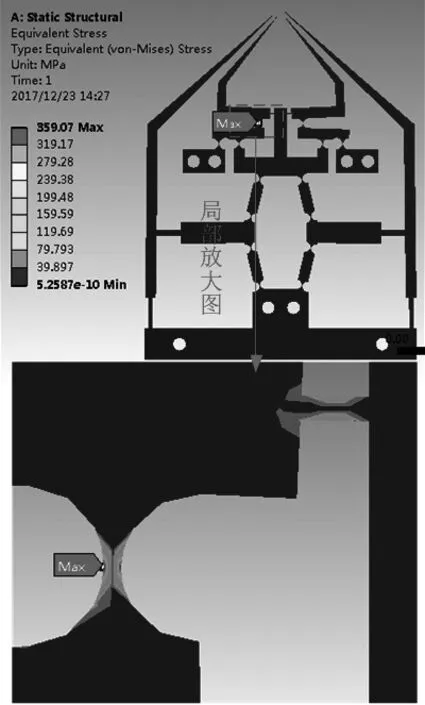
图8 应力仿真分析
4 结论
针对现有平面夹持器的缺陷,提出了一种平面四点接触的微夹持器,组合桥式机构和杠杆机构的优点设计了一种新型的结构紧凑和响应快的平面微夹持器。该平面夹持器为四点接触,且能够由一个驱动器同时驱动,提高了夹持操作的夹持稳定性,为微夹持器的设计提供一种新的思路。采用Ansysworkbench有限元分析软件对该夹持器进行了仿真分析,其仿真结果表明,在满足强度要求的情况下,该夹持器的实际放大倍数约为7.3,Ansys模态分析结果表明其固有频率为278.63Hz,具有较快的响应速度。说明了所设计的微夹持器的有效性,同时能满足微夹持器的各性能要求。
[参考文献]
[1] Alogla A, Scanlan P, Shu W M, et al. A scalable syringe-actuated microgripper for biological manipulation [J]. Procedia Engineering, 2012, 47(11): 882-885.
[2] Liu W, Yang Y Y. Multi-objective optimization of sheet metal forming process using pareto based genetic algorithm [J]. Journal of Materials Processing Technology, 2008, 208(1): 499-506.
[3] Jayaram K, Joshi S S. Development of a flexure-based force-sensing microgripper for micro-object manipulation [J]. Journal of Micromechanics and Microengineering, 2010,20(1):548-558.
[4] 余大海, 吴文荣, 罗敏, 等. 适用于ICF 靶夹持的多用微夹持器 [J]. 强激光与粒子束, 2012, 24(1): 115-118.
[5] 郝永平, 董福禄, 张嘉易, 等. 基于MEMS机构装配的微夹持器研究 [J]. 中国机械工程, 2014, 25(5): 596-601.
[6] R Zhang,J Chu,H Wang, et al. A multipurpose electrothermal microgripper for biological micro-manipulation[J]. Microsyst Technol, 2013, 19(1):89-97.
[7] 虞启凯, 游有鹏, 韩江义. 集成三维力传感器的微夹持器设计与试验 [J]. 上海交通大学学报, 2012, 46(6): 972-976, 983.
[8] 崔玉国, 朱耀祥, 娄军强, 等. 压电微夹钳钳指位移与夹持力的检测 [J]. 光学精密工程, 2015, 23(5): 1372-1379.
[9] 王代华, 杨群. 一种压电致动微夹钳及其开环位移特性 [J]. 纳米技术与精密工程, 2010, 8(1): 47-53.
[10] Nah S K, Zhong Z W. A microgripper using piezoelectric actuation for micro-object manipulation [J]. Sensors and Actuators A: Physical, 2007, 133(1): 218-224.
[11] Aravind Raghavendra M R, Senthil Kumar A, Bhat Nikhil Jagdish. Design and analysis of flexure-hinge parameter in microgripper [J]. The International Journal of Advanced Manufacturing Technology , 2010, 49(9): 1185-1193.