点云数据多种滤波方式组合优化研究
2018-03-23卢凌雯梁栋栋
卢凌雯, 梁栋栋
(安徽师范大学 国土资源与旅游学院,安徽 芜湖 241000)
引 言
三维点云数据模型目前已在虚拟现实、逆向工程、城市建模等领域得到了快速的发展,高速发展的三维激光扫描技术也使真实世界数据的获取变得相对简单[1]。由于在操作中测量设备的震动以及被测物表面粗糙等原因,点云数据不可避免地夹杂着噪声点。根据三维激光扫描仪的扫描原理,产生点云噪声的原因主要表现为以下三个方面[2]:①被测物表面粗糙或镜面反射现象的发生;②系统自身内部的误差,如仪器扫描时自身振动等;③偶然误差,如扫描时无意扫入被测物以外的数据点云。近年来,如何在数据处理过程中保持测量曲面完整性一直是人们研究的重点,因此对获取的点云进行去噪显得尤为重要[3-5]。
通过大量文献研究可知,点云数据的预处理方法研究目前已相当成熟。Lange和Polthier[6]通过采用偏微分方程进行曲面去噪,该方法对处理小范围的点云数据相当有效,但对于离散的点云数据处理来说却是不太理想。Wang等[7]通过将采样点移动到其对应的局部曲面上来进行去噪处理,该算法的鲁棒性较好,但需要处理大量数据时却需要消耗较长的时间。针对时间复杂度的影响,Xu[8]等提出一种通过分割点云自身的几何特征来进行去噪,该方法在一定程度上提高了大量点云数据处理的效率,但对于几何特征特性的保持要求较高。针对平滑的点云数据,刘大峰等[9]提出一种核密度估计聚类方法。针对分类的噪声,曹爽[10]等利用基于特征选择的双边滤波方式进行点云去噪,虽然处理的效果不错,但需要较长时间来确定特征选择。以上去噪方式在一定领域能得到较好应用,但并没有进行各种方式之间的优势互补。本文通过研究基于PCL的滤波方式,给出不同尺度下的组合最优顺序滤波算法,集成各种滤波的优势弥补单种滤波方式进行点云去噪带来的不足。
1 点云数据的预处理
1.1 点云数据来源
本文所采用的拓普康GLS-2000三维激光扫描仪采集的LIDAR点云数据尽管兼顾了空间分辨率和立面精度的要求,但由于地面LIDAR自身测量局限性,将不可避免地导致地物三维点云数据的部分漏洞,这影响后期建模的精度。为了保持数据的完整性,本文采用的摄影测量工具为大疆S1000旋翼无人机,所测数据为安徽师范大学花津校区图书馆数据,在对影像进行定向的基础上,根据定向的影像生成点云,最后将两种来源的点云进行配准实现点云同一坐标系的转换,结果如图1-3所示。

图1 影像生成的点云 图2 三维激光点云 图3 两种数据融合的点云
2 基于PCL多种方式的组合滤波去噪算法
根据上文所述三维激光扫描仪扫描产生点云数据的原因,大量点云数据进行滤波处理的情况可归纳为两种:(1)因为遮挡等问题造成离群点需要去除;(2)由于点云数据密度不规则导致部分点云突出需要平滑。针对产生点云噪声的原因,需要按具体给定的规则过滤去除点并通过一些滤波算法修改某些点的部分属性从而达到去噪的目的。PCL是无数学者在大量研究点云数据处理技术后建立起来的大型跨平台开源C++编程库,它容纳了大量点云相关的通用算法和高效的数据结构。本文基于PCL及开发工具VS2010实现了多种方式的组合滤波算法。
2.1 高斯滤波
激光扫描一般会产生密度不规则的点云集。同时,测量中的错误会造成稀疏的离群点,使重建的结果更糟,后期会导致局部点云特征的运算结果不理想。针对这类问题,可以采用高斯滤波进行去噪。高斯滤波的主要思想是:通过对每个点的邻域进行统计分析,通过高斯分布的标准,过滤掉那些不满足该标准的噪点。具体即为计算所有点与它所有临近点的平均距离,得到一个由Mean(均值)、Standard Deviation(标准差)确定的高斯分布,Mean在Global Average Distance(全局距离平均值)和S2(方差)定义之外的点,可被认为是离群点并可从对应的数据集中除去。图4-5为以安徽师范大学图书馆融合的点云数据为例显示的处理的结果。

图4 高斯滤波处理后点云(132585[points]) 图5 高斯滤波处理中去除掉的离群点(6355[points])
2.2 几何滤波
几何滤波的思想来源于图像处理的统计滤波,指用户确定任意数据集中的点在该范围内至少需要的邻近点数量。例如,在图6图中如果确定至少要有1个邻近点,那么黄色的点会被过滤掉,若确定至少要有2个邻近点,黄色和绿色的点都将被过滤掉。稀疏离群点通过每个点云集中的点在其搜索半径范围内的邻近点数量小于给定阈值M而被确定,则被确定为离群点的被过滤掉。在实验过程中要设定用于滤波的K近邻球体半径R以及阈值M。通过判断所滤波的点云数据集中的点在其K近邻的R中的近邻点的数量与设定的阈值M的大小,来确定该点是否被过滤。若对象点的数量小于M,则判断为要过滤的点;反之,该对象点保留下来。其最终处理的结果如图7。

图6 几何滤波示意图 图7 几何滤波处理后点云(127279[points])
2.3 双边滤波
双边滤波是图像滤波同时也是点云滤波中一种重要的去噪方式。其主要思想是经过邻近采样点的加权平均值来移动当下采样点的位置至修正后的位置,正是基于这样的思想,双边滤波具有在进行点云去噪的同时保持其细节特征的特性。Fleishman等[10]提出的网格去噪算法为一种迭代循环:第一步定义全部顶点u的计算域,空间域定义为顶点u到计算域内其他顶点p的距离,值域为计算域内其他顶点p到顶点u切平面的带符号距离,接着通过双边滤波的方式算得u在法向上的移动的距离,一次迭代即为更新完网格内的所有点的位置。具体计算如公式1所示:
(1)

图8 处理前法线分布 图9 处理后法线分布
3 点云数据滤波处理结果分析
为找出一种最佳顺序组合滤波方式,本文选用图书馆建筑和椅子三维点云数据模型分别进行了实验。表1为两种类型数据的不同顺序组合使用的参数及处理前后的结果,表2为实验中使用的最佳参数。
图10-11分别为室外图书馆数据模型不同滤波方法对比以及室内桌子实体模型不同滤波方法对比去除噪声的效果图。从图10中A1至A6可以看出,A1的效果最好,说明在该尺度下的点云模型去噪中,基于双边滤波、几何滤波、高斯滤波顺序的组合滤波能有效地剔除噪声,通过其中的双边滤波能较好地保持特征,能更真实地表达原始采样模型。从图11中B1至B6可以看出,B5的效果最好,说明在该尺度下的点云模型去噪中,基于双边滤波、高斯滤波、几何滤波顺序的组合滤波能更有效地剔除噪声。本文算法使用的最佳参数如表2所示,是去除不同尺度噪声的最佳参数的组合。
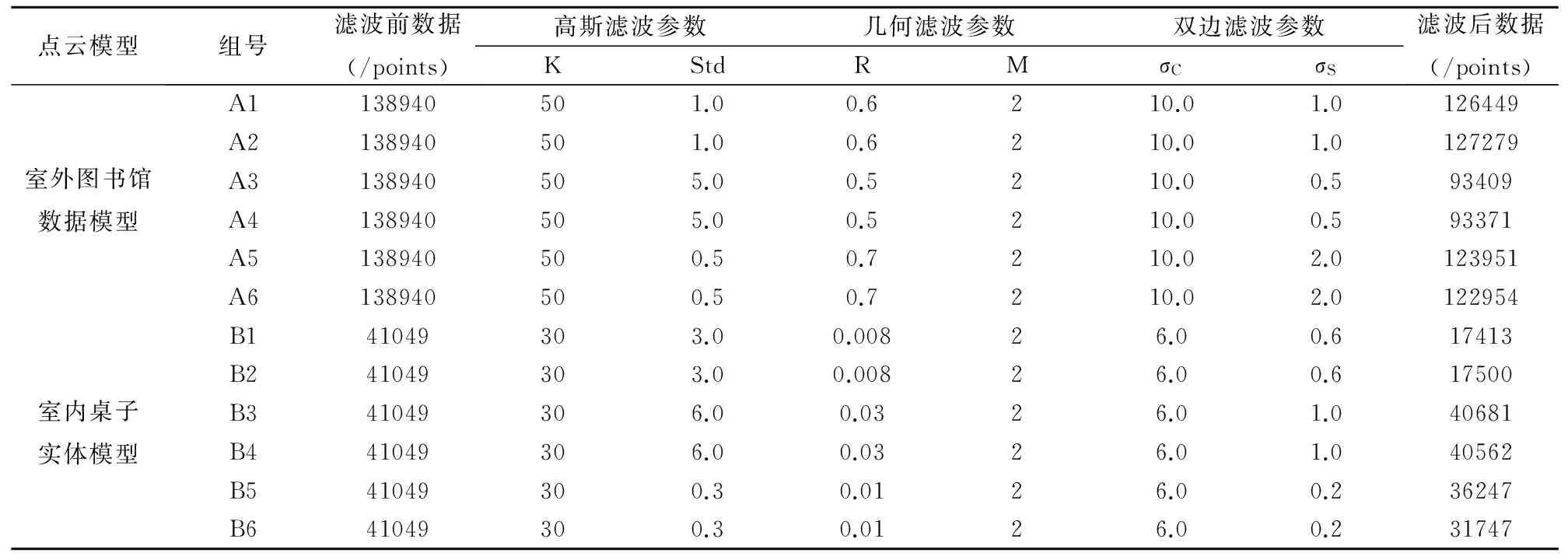
表1 不同顺序组合滤波使用参数
注:A1、A4、A6、B1、B4、B6滤波顺序为双边滤波、几何滤波、高斯滤波;A2、A3、A5、B2、B3、B5滤波顺序为双边滤波、高斯滤波、几何滤波

图10 室外图书馆数据模型不同滤波方法对比(注:A0为模型源数据)

图11 室内桌子实体模型不同滤波方法对比(注:B0为模型源数据)

点云模型滤波前数据(/points)高斯滤波参数几何滤波参数双边滤波参数KStdRMσCσS滤波后数据(/points)室外图书馆数据模型138940501.00.6210.01.0127279室内桌子实体模型41049300.30.0126.00.236247
注:室外图书馆滤波顺序为双边滤波、几何滤波、高斯滤波;室内桌子滤波的顺序为双边滤波、高斯滤波、几何滤波
5 结语
本文通过研究基于PCL不同尺度下不同顺序的组合滤波算法,集成双边滤波、高斯滤波、几何滤波的优点,经大量实验,最终给出了点云模型不同尺度下的最佳顺序及参数组合,在进行点云去噪时,简单有效,运行速度快,具有较强的鲁棒性和保特征性,为三维建筑建模中点云数据的滤波提供一定的参考价值。接下来,算法中各个单独滤波中如何改进、进一步提高算法的效率以及与本文未涉及的滤波方式之间的比较,将是下一步工作的重点。
[1] LIVNY Y, YAN F, OLSON M, et al. Automatic reconstruction of tree skeletal structures from point clouds[J]. ACM Transactions on Graphics, 2010,29(6):81-95.
[2] 潘建刚.基于激光扫描数据的三维重建关键技术研究[D].北京:首都师范大学,2005:1-60.
[3] 杨客,张志毅,董艳.基于自适应八叉树分割点云的表面模型重建[J].计算机应用与软件,2013,30(6):83-87.
[4] 刘辉,王伯雄,任怀艺,等.基于三维重建数据的双向点云去噪方法研究[J].电子测量与仪器学报,2013,27(1):1-7.
[5] 李晋江,张彩明,范辉.群体智能点云光顺去噪算法[J].计算机集成制造系统,2011,17(5):935-945.
[6] DESBRUN M, MEYER M, SEHR P. Implicit fairing of irregular meshes using diffusion and curvature flow[J]. Proceed-ing of Siggraph, New York:ACMPress,1999:317-324.
[7] WANG X, LI Z, MAI Y, et al.Robust denoising of unorganized point clouds[C]//ICISS. Proceedings of the 2011 Interna-tional Conference on Intelligent Computing and Integrated Systems.Piscataway: IEEE,2013:1-3.
[8] XU S, YANG Z, WU W. Algorithm of 3D reconstruction based on point cloud segmentation denoising[C]//CISE. Proceedings of the 2010 2nd International Conference on Information Science and Engineering,Piscataway: IEEE, 2010:3510-3513.
[9] 刘大峰,廖文和,戴宁,等.散乱点云去噪算法的研究与实现[J].东南大学学报(自然科学版),2007,37(6),1009-1011.
[10] FLEISHMAN S, DRORI I, COHEN-OR D. Bilateral mesh denoising[J]. Acm Transactions on Graphics, 2003,22(3):950-953.
[11] 朱德海,郭浩,苏伟,等.点云库PCL学习教程[M].北京:北京航空航天大学出版社,2012:1-268.
