非共振式压电直线电机中的防剪切机构
2018-01-04孙梦馨黄卫清
孙梦馨, 王 寅,2, 黄卫清, 卢 倩
(1.南京航空航天大学机械结构力学及控制国家重点实验室 南京,210016)(2.华侨大学精密仪器研究中心 厦门,361021)
非共振式压电直线电机中的防剪切机构
孙梦馨1, 王 寅1,2, 黄卫清1, 卢 倩1
(1.南京航空航天大学机械结构力学及控制国家重点实验室 南京,210016)(2.华侨大学精密仪器研究中心 厦门,361021)
基于叠层压电陶瓷在使用中需要设计防剪切机构的特点,在总结非共振式压电直线电机的工作原理的基础上,对3种不同的防剪切机构进行了理论分析,结合已有的样机研究了其对非共振电机运动性能的影响,概述了其优势与劣势。在理论仿真分析中,得到最佳的机构形式,并对其进行结构优化,将最佳方案运用于定子结构中,制作了样机,实验结果验证了理论分析的正确性。新型样机在输入100 V,100 Hz的方波-三角波信号时,电机正向运动速度为209.1 μm/s,反向运动速度为210.3 μm/s。
压电直线电机; 非共振; 叠层压电陶瓷; 防剪切机构
引 言
近年来,压电作动器由于其精度高、响应快等优点,得到了越来越多的研究者的关注,设计制造了多种压电作动器[1-2]。传统的压电作动器通常以片状压电陶瓷作为主要驱动件,激发结构的共振模态,使结构定子的驱动足产生椭圆运动,从而借助摩擦力驱动动子做直线运动,这种超声电机是一种共振式电机。该电机优点在于结构简单、定位精确、设计灵活,然而,共振的模态并非稳定状态,容易受到加工误差、摩擦升温等外界条件的干扰,影响电机的工作性能[3-4]。以叠层压电陶瓷为主要输出部件而设计的非共振式直线电机,不仅拥有共振型电机的诸多优点,而且由于其能在非共振状态下输出较大的输出力和变形,电机运作状态较为稳定,有望运用于光波导封装等高新技术领域[5-6]。
叠层压电陶瓷作为非共振电机中的核心部件,如使用不当,将在一定程度上导致机械损坏,严重的会引起退极化直接导致其失效。叠层压电陶瓷材料抗压能力较强,但是不能受拉力与剪切力。在电机的设计中,一方面需要对叠层压电陶瓷加以预载荷,另一方面,由于定子驱动足的运动是由两个方向的运动耦合而产生的,会使得叠层压电陶瓷产生剪切力,所以需要一定的结构来防止叠堆受剪切力而导致其损坏。通常在非共振电机的设计中,会在叠层压电陶瓷输出方向添加一定的机构来防止切向力作用到叠堆上,可以采用的防切向力机构形式有柔性铰链、球副铰链以及半圆柱垫块。笔者所在团队提出了多种非共振式压电直线电机,对于保护叠堆的机构有不同的设计与试验[7-10]。李海林等[11]提出的一种双足驱动压电直线电机中,布置于叠层压电陶瓷后侧的柔性铰链发挥了防剪切机构的效果,基本满足驱动精密直线进给系统要求,然而却在双向运动一致性的问题上有较大缺陷。陈培洪等[12]提出的一种圆筒形压电直线电机中,采用球铰来装配叠层压电陶瓷材料,该电机结构紧凑,输出精确,但由于定子包含零件较多,造成了一定的装配难度。
非共振型压电直线电机作为精密驱动器,若使用上述提到的机构时形式不当必然会对电机的性能造成巨大的影响。笔者在现有研究成果的基础上,分别对应用3种形式的防剪切机构的电机加以研究,分析各种机构的优劣所在,并对机构进行优化。
1 非共振压电电机的原理
图1所示为本课题组提出的一种双足驱动压电直线电机的定子及电机整体结构图,将2个定子结构装入夹持装置中,然后将其紧贴动子导轨安装。当在叠层压电陶瓷1,2,3,4上分别添加如图2所示的方波-三角波信号时,2个定子加交替作矩形运动,并通过摩擦力驱使动子导轨作直线运动,交换叠层压电陶瓷1和3上的运动就可以达到使动子运动反向的目的。

图1 双足驱动压电直线电机定子及电机整体图Fig.1 Stator and the whole structure of double-foot piezoelectric motor
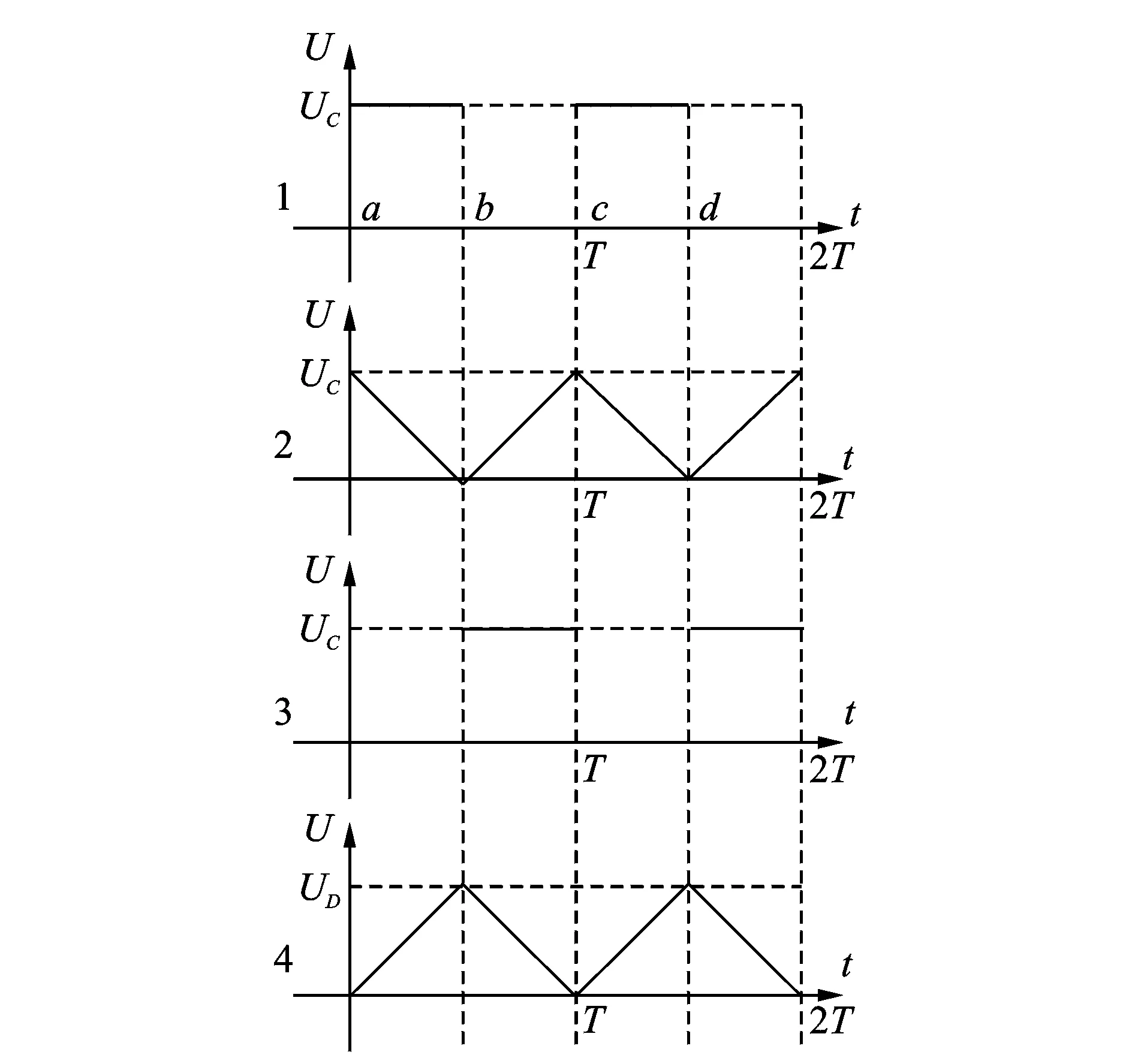
图2 叠层压电陶瓷1,2,3,4上所加信号图Fig.2 Signal applied on the piezoelectric stack 1,2,3,4
图3所示为一个周期内电机运动的机理:a时刻,定子左驱动足的叠层压电陶瓷2处于伸长状态,叠层压电陶瓷1上的电压由0快速增大到UC,其在y方向伸长,此时左驱动足顶端顶开动子导轨;b时刻,叠层压电陶瓷2上的电压由UD降压至0,其在x方向缩短一定的位移量δ,同时右驱动足的叠层压电陶瓷4升压至UD,在x负方向伸长一定的位移量δ,从a状态到b状态,左驱动足推动动子导轨在x方向运动了δ位移;c时刻,叠层压电陶瓷1中的电压快速下降为0,恢复到原长状态,同时,右驱动足中的叠层压电陶瓷3上的电压快速增大到UC,其在y方向伸长,此时右驱动足顶开导轨;d时刻,叠层压电陶瓷2上的电压由0升至UD,在x负方向伸长一定得位移量δ,同时叠层压电陶瓷4从UD降压至0,在x方向缩短一定得位移量δ,从c时刻到d时刻,右驱动足推动动子导轨在x方向运动了δ位移。
由此得出,在一个周期内,定子推动导轨向x方向运动2δ位移。如此循环往复,电机就可以实现大行程的直线运动。

图3 电机工作原理图Fig.3 Operation principle of motor
2 电机中的防剪切机构
2.1 柔性铰链
柔性铰链是利用材料的微形弹性变形产生位移的一种特殊运动副,具有无机械摩擦、无间隙及运动灵敏度高等优点。由图4可以看出,这种双足驱动压电直线电机采用了柔性铰链的形式来防剪切。实验证明,该铰链有一定的防剪切功能,电机性能基本满足驱动精密直线进给系统的要求;然而,在对电机进行双向直线运动速度测试时(输入信号电压为100 V,频率为100 Hz),得到了如图5所示的速度-时间曲线。可见,电机双向的速度有一定的差距,x轴正方向运动速度比x轴负方向运动速度小,电机的这种特性不利于其精密控制,亟需解决。

图4 柔性铰链定子结构图Fig.4 Structure of stator with flexure hinge
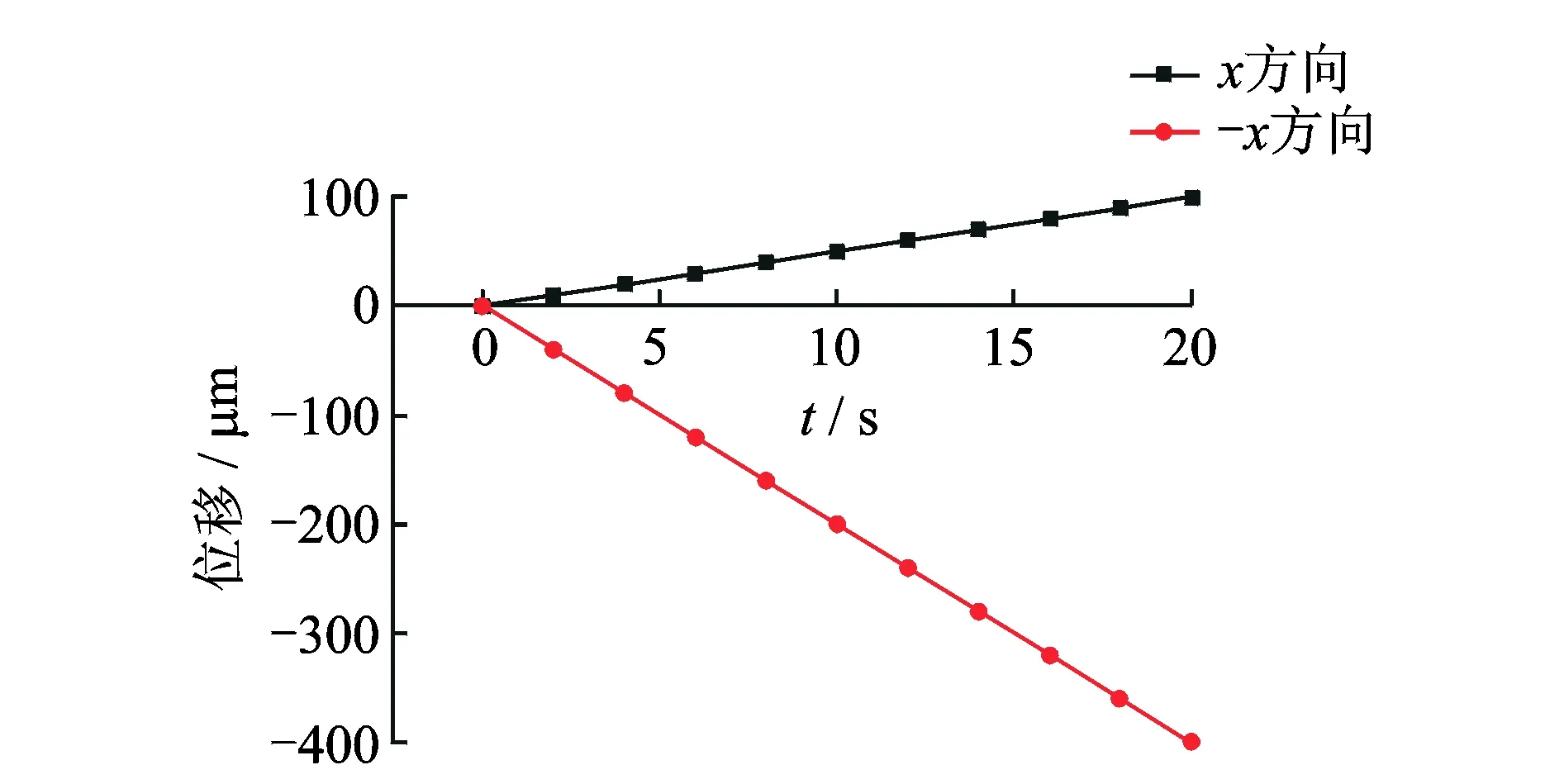
图5 双足驱动直线电机速度-时间曲线Fig.5 Velocity-time curve of double-foot piezoelectric linear motor
对结构进行适当简化,采用ANSYS对这一结构做一个周期内的轨迹分析。通过分析图6所示驱动足轨迹,并将该定子分别作用于动子导轨上时,可计算出定子驱动动子向x方向运动时,驱动足单步步距约为1.466 μm(单步步距均为电机在一个周期内的位移量),100 Hz时速度约为146.6 μm/s;而定子驱动动子向x负方向运动时,单步步距约为2.267 μm,速度约为226.7 μm/s。
双向运动差距较大的原因主要在于柔性铰链的加入使得给定子加上预紧力后,铰链已经有了细微的变形,该变形的产生导致定子驱动足向x轴负方向运动时,铰链对其有推动作用;而定子驱动足向x轴正方向运动时,铰链对其有阻碍作用,直接造成了双向速度的不一致,其速度差距与铰链的刚度有一定关系。一种较为简单的解决方法是在叠层压电陶瓷另一端也加个相同的铰链,两个铰链有相反方向的变形,阻碍与推动的作用相互有一定的抵消;然而这一方法增加了铰链的数量,造成了传动能量的损失,对动子运动的速度与负载能力都有一定影响,并且增加了装配的难度,并不是最佳的方案。定子结构中的柔性铰链是导致电机双向速度不同的主要原因,对该铰链形式进行优化,如图7所示的铰链模型及尺寸。
在定子中使用的柔性铰链,由于采用的叠层压电陶瓷尺寸为5 mm×5 mm×14 mm,使该铰链的长宽尺寸受到了制约,所以主要讨论改变铰链中圆形半径为r及中部间距为t时刚度的变化情况。
在满足刚度要求的情况下,对柔性铰链的尺寸进行仿真分析,计算定子驱动动子在两个方向的位移差距,可以得到如图8所示的结果。可以看出,铰链圆孔半径r和间距t增加时,速度差距基本都会有轻微的增加,通过优化,并不能大幅度的降低速度差。
使用柔性铰链作为非共振电机的防剪切机构,优势在于其设计与安装都较为方便。通过仿真对铰链进行优化发现并不能很好地解决其双向运动速度不一致的问题,并且在实际加工中,由于存在一定的加工误差,不能保证实现理想的电机性能。
2.2 球铰链
球铰链控制灵活、准确,扭转角度大,将其运用于所述电机中,在防剪切的同时还起到防扭作用,并且由于球铰在扭转过程中刚度几乎不变,避免了双向性能不一致的可能性。相比于单面球铰,双面球铰在同一条输出线上元件数较多,增大了装配的难度。图9所示为一种非共振式压电直线电机的定子,其结构中的陶瓷支撑、钢球配合前端的驱动轴构成了球铰链。
叠层压电陶瓷的预紧采用了球铰链的方式,实验发现,双向的速度基本一致。对球铰进行理论仿真分析,简化其结构,仍然采用类似于图5的结构用球铰替代柔铰,通过建模对比球铰链与柔性铰链对电机的影响,可以得到如图10所示的结果。

图6 含柔性铰链的定子双向运动轨迹 图7 柔性铰链模型图 Fig.6 Trajectory of driving foot with flexure hinge when the stator moving along bi-direction Fig.7 The model of flexure hinge

图8 铰链不同尺寸下两方向运动速度差距 图9 采用球铰的非共振电机示意图 Fig.8 Difference of velocity with different flexure hinge Fig.9 Non-resonant motor with spherical hinge inside
从仿真结果中可以得到,以球铰作为定子中的防剪切机构时,定子驱动足驱动动子向x方向运动时单步步距为1.66 μm,定子驱动足驱动动子向x负方向运动时单步步距为1.74 μm,步距差距较小,在一定频率信号下两向运动速度相差也较小。在实际装配中使用球铰时,由于在同一输出线上元件数较多,装配较为繁琐,装配的精度不够导致了最终输出性能的偏差。
2.3 半圆柱垫块
半圆柱垫块定子结构外形简单,加工装配都比较便利,如图11所示。采用半圆柱垫块时,可以得到如图12所示的仿真结果。
驱动足x方向运动单步步距大约为0.703 μm,x负方向运动单步步距约为0.733 μm,双向运动差距较小,运动速度相比之前提到的铰链有明显减小,从仿真结果可以看出定子的运动形式较为稳定。
使用半圆柱垫块作为定子结构中叠层压电陶瓷防剪切机构,在起到防剪切效果的同时,电机动子运动速度有所降低,但不会如柔铰般使电机的双向运动速度产生显著差异。
从初步仿真结果可以看出,单面半圆柱垫块作为防剪切机构性能较为稳定,且结构简单,装配方便。使用半圆柱垫块结构仿真分析双足驱动动子情况下的运动,建立如图13所示模型,得到如图14所示的运动特性图。
根据一个周期内双足驱动的仿真结果,可得在100 Hz下动子向x方向运动速度为249.7 μm/s,向x负方向运动速度为280.6 μm/s。双足驱动比单足时的速度提高了不止1倍,主要原因是其中一足工作时会顶开动子导轨,使得另一个在做回复运动的驱动足与动子更好好的脱离,避免了回复运动影响动子直线运动的行程。
对图15所示的定子中的半圆柱垫块进行优化,由于受到定子整体尺寸约束,只改变圆半径r对电机性能进行研究。
图15为调整半径r时,动子向x方向与x负方向做直线运动的速度变化曲线。随着半径r的增大,正向与反向速度有不同程度的减小。当半径为5 mm时,双向速度差距最小,此时电机运动速度约为220 μm/s。

图10 含球铰链的定子驱动足双向运动轨迹 图11 半圆柱垫块定子结构 Fig.10 Trajectory of driving foot with spherical hinge when the stator moving along bi-direction Fig.11 Structure of stator with half-cylinder block

图12 含半圆柱垫块的定子双向运动轨迹 图13 双足驱动电机仿真结构图 Fig.12 Trajectory of driving foot with half-circular block when the stator moving along bi-direction Fig.13 Simulation structure of the double-foot motor

图14 动子向x及x负方向运动位移-时间曲线 图15 半圆柱半径变化时双向速度变化情况 Fig.14 Displacement-time curve when the mover velocity when radius of the Fig.15 The change of two directions half cylinder changes
按照仿真结果,应用该圆柱垫块制造如图16所示的定子,在该定子中对加预紧力的方式做了一些改进。将该定子装配成双足驱动直线电机,利用激光位移传感器对该电机进行测试,实验系统如图17所示。
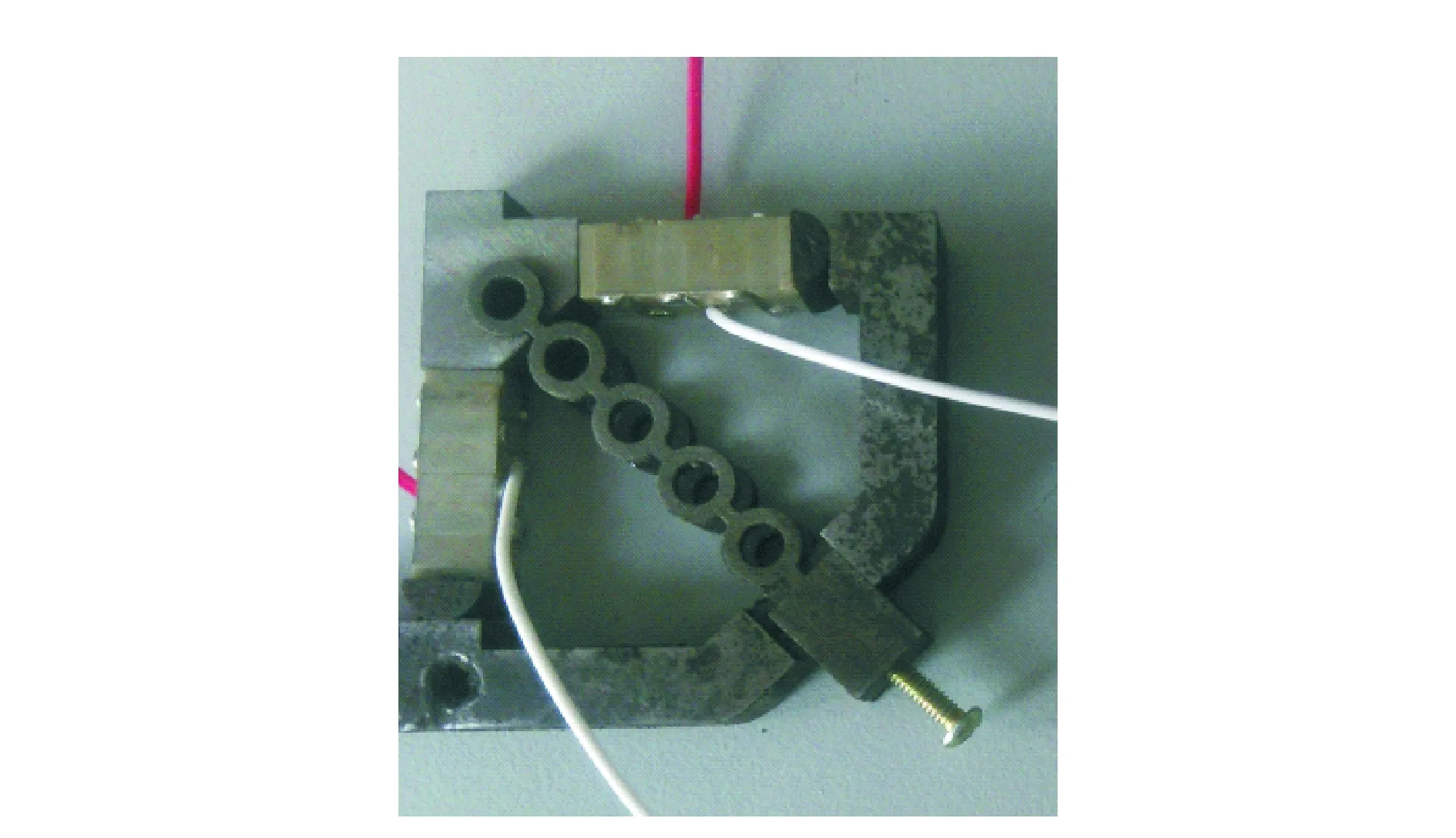
图16 内含圆柱垫块的定子示意图Fig.16 The prototype of the stator with half-cylinder block
在输入信号电压为100 V、频率为100 Hz时测试得到电机位移-时间曲线如图18所示。可见,电机正向运动速度为209.1 μm/s,反向运动速度为210.3 μm/s,与理论分析结果基本一致。
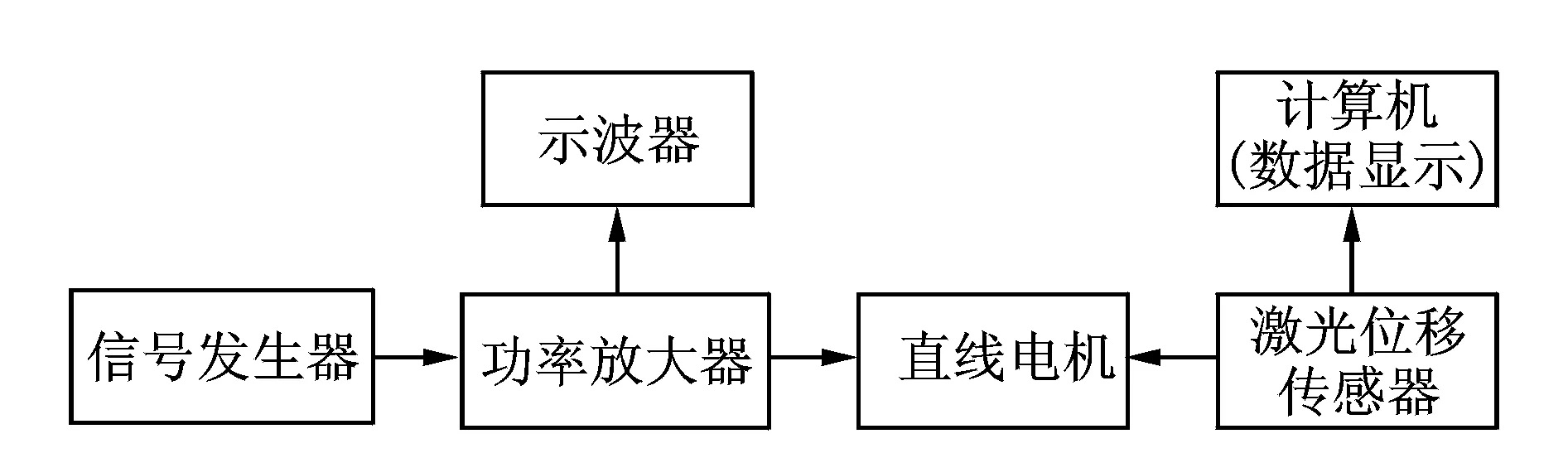
图17 电机实验系统图Fig.17 Experiment system of the motor
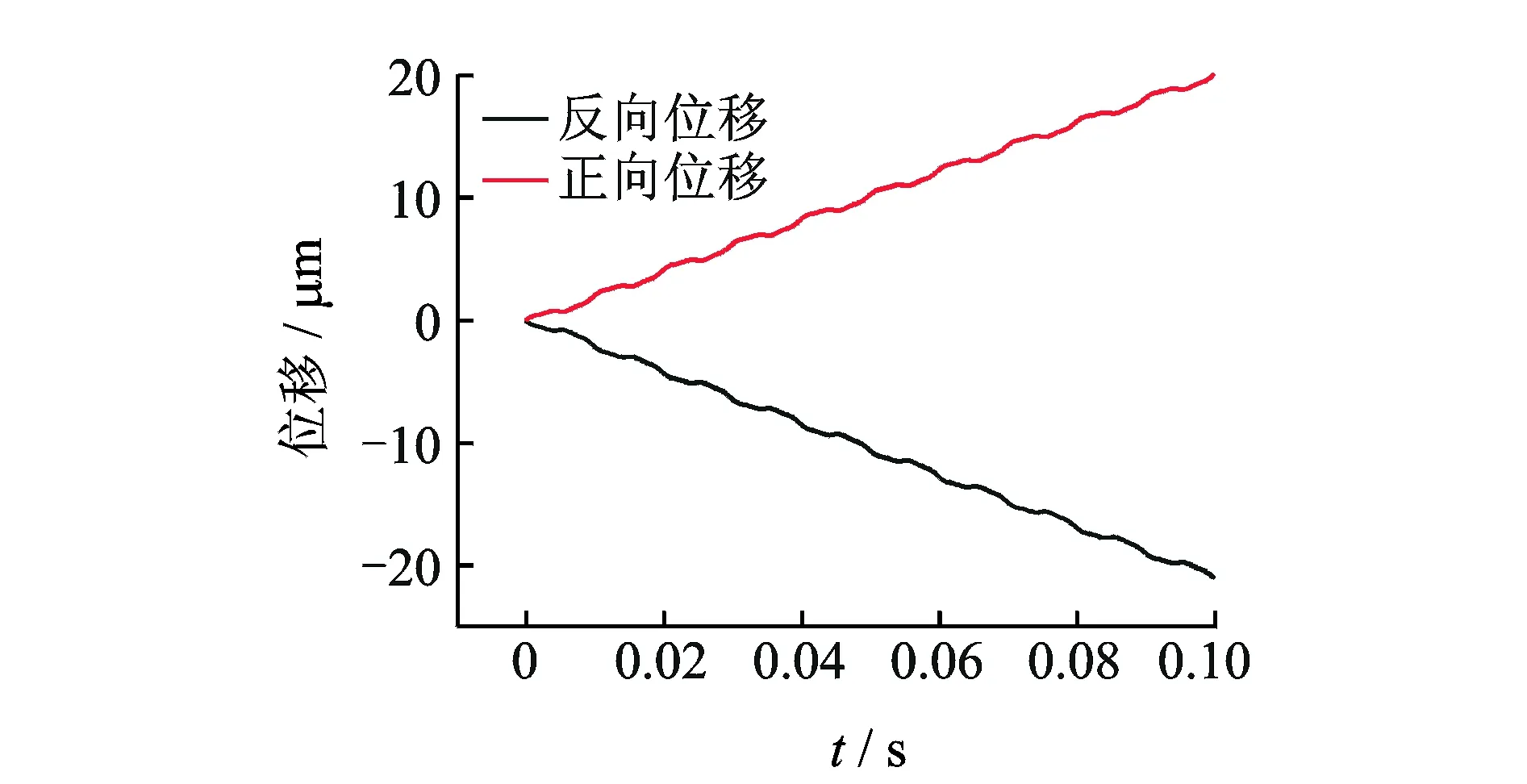
图18 电机位移-时间曲线Fig.18 Displacement-time curve of the motor
半圆柱垫块加工装配较为方便,会使电机速度有一定的降低,装配半圆柱垫块的电机双向运动的速度基本相同,是较为理想的叠层压电陶瓷防剪切机构。制造出的非共振式压电直线电机加工方便,具有快响应、大行程的特点,然而其运动及负载性能仍需进一步改进来加以提高。
3 结 论
1) 运用柔性铰链作为防剪切机构,具有无机械摩擦、无间隙及运动灵敏度高的优点,然而由于电机定子的预紧力的存在,运用单个柔性铰链必然造成电机双向运动性能的差距,对运动精度产生了不利的影响。
2) 运用球铰作为防剪切机构,控制灵活、准确,扭转角度大,同时能起到防扭作用;然而运用球铰时,由于在叠层压电陶瓷输出方向上布置了较多的元件,会加大装配的难度。
3) 运用半圆柱垫块作为防剪切机构,加工装配都较为方便,虽然会使得电机直线运动速度下降,但是运动过程较为稳定,并且电机的双向运动速度差距较小。
4) 经过对3种防剪切机构的对比,得出半圆柱垫块在电机中的运用效果较为理想。利用优化过的半圆柱垫块设计一款新型的定子,制造样机并通过实验验证了原理的正确性。当输入100 V,100 Hz的电压信号时,电机正向运动速度为209.1 μm/s,反向运动速度为210.3 μm/s。
[1] 赵淳生.超声电机技术与应用[M].北京:科学出版社,2007:53-57.
[2] Newton D, Garcia E, Horner G C. A linear piezoelectric motor[J]. Smart Materials & Structures, 1998,7(3):295-304.
[3] 时运来,李玉宝,赵淳生.面内模态直线型超声电机的优化设计[J].中国电机工程学报,2008,28(30):56-60.
Shi Yunlai, Li Yubao, Zhao Chunsheng. Optimum design of a linear ultrasonic motor based on in-plane modes[J]. Proceedings of the CSEE, 2008,28(30):56-60. (in Chinese)
[4] 徐旭,梁艳春,时小虎.超声马达的频率温度特性分析[J].吉林大学学报:理学版,2002,40(2):109-113.
Xu Xu, Liang Yanchun, Shi Xiaohu. Analysis of frequency-temperature characteristics of ultrasonic motors[J]. Journal of JiLin University:Science Edition, 2002,40(2):109-113. (in Chinese)
[5] Zhao Honwei, Fu Lu, Ren Luquan, et al. Design and experimental research of a novel inchworm type piezo-driven rotary actuator with the changeable clamping radius[J]. Review of Scientific Instruments, 2013,84(1):15006.
[6] Choi K, Lee J J, Hata S. A piezo-driven compliant stage with double mechanical amplification mechanisms arranged in parallel[J]. Sensors and Actuators A: Physical, 2010,161(1/2):173-181.
[7] 王寅,孙梦馨,黄卫清,等.双足步进作动压电直线电机的工作机理及试验[J].振动、测试与诊断,2015,35(2):388-393.
Wang Yin, Sun Mengxin, Huang Weiqing, et al. Principle and experimental research on a piezoelectric linear stepping motor with double driving feet[J]. Journal of Vibration, Measurement & Diagnosis,2015,35(2):388-393. (in Chinese)
[8] 徐晶晶,陈西府,王寅,等.基于复合放大机构的压电直线电机[J].压电与声光,2013,35(2):234-236, 249.
Xu Jingjing, Chen Xifu, Wang Yin, et al. A piezoelectric linear motor based on combined amplification structure[J]. Piezoelectric & Acoustooptics, 2013,35(2):234-236,249. (in Chinese)
[9] 陈西府,徐晶晶,王寅,等.摩擦驱动型叠层压电陶瓷直线电机的工作机理[J].振动、测试与诊断,2011,31(6):742-746.
Chen Xifu, Xu Jingjing, Wang Yin, et al. Working mechanism of friction-drive-type linear motor with piezoelectric stacks[J]. Journal of Vibration, Measurement & Diagnosis,2011,31(6):742-746. (in Chinese)
[10] 陈西府,黄卫清,王寅.动摩擦型叠层压电陶瓷直线电机定子的振动特性[J].振动、测试与诊断,2014,34(5):960-966.
Chen Xifu, Huang Weiqing, Wang Yin. Vibration characteristics of the stator of dynamic friction type linear piezoelectric stack motors[J]. Journal of Vibration, Measurement & Diagnosis, 2014,34(5):960-966. (in Chinese)
[11] 李海林,王寅,黄卫清,等.一种双足驱动压电直线电机[J].中国机械工程,2014,25(20):2719-2723.
Li Hailin, Wang Yin, Huang Weiqing, et al. A double-foot driving linear piezoelectric motor[J]. China Mechanical Engineering, 2014,25(20):2719-2723. (in Chinese)
[12] 陈培洪,王寅,黄卫清.一种圆筒形压电直线电机的设计及实验研究[J].中国机械工程,2011(12):1484-1488.
Chen Peihong, Wang Yin, Huang Weiqing. Study on design and tests of a piezoelectric linear motor using columnar actuator[J]. China Mechanical Engineering, 2011(12):1484-1488. (in Chinese)
10.16450/j.cnki.issn.1004-6801.2017.06.027
国家自然科学基金资助项目(51375224);江苏高校优势学科建设工程资助项目
2015-09-25;
2015-11-13
TM35; TM356; TM359.4

孙梦馨,男,1989年11月生,博士生。主要研究方向为压电精密致动技术。
E-mail:mxsun@nuaa.edu.cn
黄卫清,男,1965年4月生,博士、教授、博士生导师。主要研究方向为超声电机技术。
E-mail:mehwq@nuaa.edu.cn