一种新的磁传感器辅助弹载接收机跟踪环路的方法
2017-12-02朱建良吴盘龙薄煜明
朱建良,吴盘龙,薄煜明
(南京理工大学 自动化学院,南京 210094)
一种新的磁传感器辅助弹载接收机跟踪环路的方法
朱建良,吴盘龙,薄煜明
(南京理工大学 自动化学院,南京 210094)
针对弹载接收机高速旋转的特性,提出一种利用磁传感器测量弹体姿态,补偿旋转引起的载波多普勒频移和相位偏移的方法。首先,根据弹丸弹道学特征,推导弹体高速旋转引起的载波频移和相位偏移与弹体姿态的表达式;其次,研究了接收机载波跟踪环路的跟踪门限与弹体动态应力的关系;然后,给出弹体坐标系中,磁传感器测量弹体姿态的算法——极值比值法和积分比值法。仿真试验结果表明,磁传感器弹体姿态估计的方法能够有效降低弹载接收机跟踪环路的跟踪门限,其载噪比降低了3 dB·Hz,环路带宽减小了100 Hz以上,提高了弹载接收机GNSS信号跟踪能力。
弹载接收机;高旋;磁传感器;跟踪门限;积分比值法
弹载接收机在弹体飞行中一直处于旋转状态,普通接收天线相对于卫星的姿态快速改变,天线的增益和相位方向图的波动较大。通常采用共形微带天线,将多个圆极化微带贴片共形到一个圆柱体或椎体外表面上[1],使环形天线相位中心稳定于载体转轴上,但共形微带天线仍然不能完全消除信号畸变,因为设计与安装等因素,其相位中心与转轴总是有一定的偏移,导致旋转载体接收到的卫星信号相位存在与载体转速和相位中心偏移量有关的调制效应。利用磁传感器辅助弹载接收机具有价格低、抗冲击能力强、无累积误差的优点[2-3]。
北京理工大学的宇航科学技术学院研究了旋转条件下的GPS接收信号的频率和相位变化情况[4],结果表明转速200 r/s时,载波多普勒频移高达300 Hz,对载波环路跟踪有很大影响,但未给出解决方案。北京跟踪与通信技术研究所研究了采用圆柱共形微带天线解决旋转状态下GPS信号接收完整性问题的方法,分析了相位中心的偏移量和变化量对 GPS测距和测速精度的影响,利用载体姿态角已知和入射信号的已知参数对多普勒频移进行补偿,仿真能够基本消除载体旋转引起的多普勒频移误差,但文献[4]未给出如何精确地获得载体姿态角的方法。GPS载波估计法利用GPS信号的载波相位和幅度特性设计滚转角滤波器[5-6],仅可测量载体横滚角和转速。
本文主要研究旋转状态下的弹载接收机接收信号与弹体姿态的关系,并提出利用磁传感器测量旋转弹体姿态的方法,辅助弹载接收机的跟踪环路。
1 旋转状态下的信号
弹体的接收机采用共形微带天线,能够在弹体高速旋转时,实现卫星信号的连续接收。但共形微带天线的相位中心和几何中心不一致的现象,会导致接收机接收到的卫星信号的载频和相位出现周期性的偏差。

图1 旋转载体运动示意图Fig.1 Schematic diagram of rotating carrier motion
在OC与L1组成的平面内,令则OD即为OC在L1上的投影。假设卫星发射的电磁波在弹体上看作是平行信号,OD即为共形微带天线的相位中心C到卫星天线的距离R(t)与几何中心O到卫星天线的距离r(t)之间的距离差。

式中,n为弹体的转动速度。
相位中心C到卫星天线的距离R(t)为

弹体旋转导致的距离误差呈周期性变化,引起接收机共形微带天线的相位中心与卫星天线相对速度的改变。式(2)对时间t求导,可得相对速度的改变量Δv:

因此,弹体旋转引起的载波多普勒频移Δf为

式中,f0为卫星发射信号的载波频率,c为光速。
随着弹体的飞行,β角迅速改变。图2示出了β取不同值时,载波频移随时间的变化曲线,载波频率光速c为83× 10m/s,L2 与Oyb轴的初始夹角α取0,弹体转速n取20 r/s,接收机共形微带天线的相位中心与几何中心的误差r0取0.05 m,和Δf2分别表示β角取π/4和0时的载波频移。

图2 β分别为π/4和0时的载波频移Fig.2 Carrier frequency shifts when β is π/4 and 0 respectively
图2中,假定弹体旋转一圈时,卫星位置和β角没有明显变化,则载波频移的曲线以正弦规律变化。随着α角的变化,载波频移的幅值最大值达到33 Hz,单个旋转周期50 ms的变化幅值为33 Hz,即660 Hz/s,对于接收机对卫星信号的捕获跟踪产生较大的影响,而且高速旋转也使得接收机接收信号的载波相位产生剧烈变化。因此,高速旋转带来的高速度和高加速度引起的高动态易对弹载接收机的信号跟踪环路产生较大的不利影响。
2 弹载接收机的跟踪门限
弹载GNSS信号接收机的载波跟踪环路包括锁相环、锁频环和码环,一般可分为一阶、二阶和三阶环路。锁相环通过数控振荡器复制一份在相位上与接收的载波信号一致的载波信号,并根据复制的载波信号估计出接收载波信号的多普勒频移和相位偏移参数。锁相环对信号的相位估计存在误差,误差的大小决定了载波跟踪环路是否能够承受载体的动态应力,是否能够保持跟踪。
锁相环误差源包括相位抖动iσ和动态应力误差eθ,相位抖动误差又主要分为热噪声σtPLL、接收机机械颤动引起的振荡器频率抖动vσ和艾兰型晶体振荡引起的相位抖动噪声Aσ。


式中,BL表示环路带宽,C/N0表示载噪比,Tcoh表示相关积分时间。
N阶锁相环的动态应力误差eθ可表示成如下形式:

式中,nω表示环路的特征频率,R表示卫星相位中心与接收机天线相位中心的直线距离,表示距离对时间的N次导数。
锁相环的跟踪门限一般取3倍的相位测量误差均方差不得超过1/4的鉴相器牵入范围,即

假设三阶锁相环的预检测相干积分时间Tcoh为0.01 s,载噪比C/N0为 25 dB·Hz。接收机在卫星观测方向上相对于卫星的加速度为

假设载体质心相对卫星做匀速运动,弹体旋转产生的三阶锁相环动态应力误差θe用均方根值(RMS)可以表示为

式中,环路特征频率nω为BL/0.7845,β取0。
信号载噪比C/N0取25 dB·Hz,弹体转速n取20 r/s,接收机共形微带天线的相位中心与几何中心的误差r0取0.05 m,β取0。图3表示弹载接收机三阶锁相环动态应力误差eθ、热噪声均方差3倍相位测量误差均方差与锁相环噪声带宽BL的关系。
对于特定的GNSS接收机,在信号载噪比和其他接收机相关参数一定时,相位测量误差与锁相环噪声带宽BL和弹体动态应力误差eθ有关。弹载接收机拥有很大的加加速度,使得环路动态应力成为主要的误差源。当环路动态应力增大时,增大锁相环噪声带宽BL可增强环路对动态应力的承受能力,但也会提高热噪声均方差σtPLL。
因此,本文在载噪比和弹载接收机其他条件不变的情况下,提出通过磁传感器估计并补偿弹体旋转的动态应力,使得载噪比门限值减小,从而满足信号的持续跟踪条件。

图3 三阶锁相环相位误差Fig.3 Three-order phase-locked loop phase error
3 磁传感器辅助跟踪
弹体高速旋转引起的载波频移和相位偏移与弹体姿态、弹体转速n、几何中心和相位中心误差值r0以及入射信号与弹体旋转面的夹角β有关。其中,r0可事先测定,β取决于弹体姿态和卫星的相对位置。
本文采用磁传感器组合方式,在弹体飞行过程中获取弹体的三个欧拉角和转速。根据发射瞬间的星历数据,可以推算出弹体入射信号的三个欧拉角,再由弹体和入射信号的欧拉角推导出入射信号与弹体旋转面的夹角β。
3.1 弹体姿态
两个非正交放置的磁传感器S1、S2分别安装在弹体坐标系的Oxb轴的A、B两点上,两个敏感轴都在平面内,S1的敏感轴AS1与Ozb轴平行,S2的敏感轴BS2与轴成λ角,如图4所示。
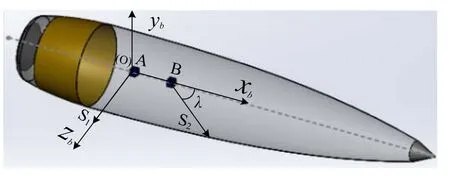
图4 磁传感器安装示意图Fig.4 Schematic diagram of mounted magnetic sensors
磁传感器S1的测量值为Hbz,S2的测量值为Hbx和Hbz的组合。


本文假设弹体飞行过程中,航向角ψ不变。假设弹体旋转的一周内作匀速转动,且俯仰角mθ不变。
测量值HS1或HS2为零时,等式(11)和(12)得以消去未知数磁场强度标量h,可减少周围干扰磁场环境对计算结果的影响。HS1过零点时有横滚角γ:

式中:n=1, 2;函数的两个参数不同时为零;横滚角γ是关于俯仰角mθ的函数。
弹体旋转一周内,由于航向角ψ和俯仰角mθ近似不变,极值比值法和积分比值法可以获得对俯仰角mθ的估计值。极值比值法[7-8]根据HS1和HS2曲线每个周期各有一个极大值和极小值的特征[9],求解此时的俯仰角mθ:

积分比值法利用两个磁传感器采样曲线HS1和HS2在旋转过程中的所有采样点的平方进行积分计算,然后再做比例运算。该算法利用了采样过程中的所有信息进行滤波,以减少随机干扰的影响。再根据弹体旋转的特征推导积分模型与俯仰角的关系表达式[10]:

式中,两个参数不能同时为零,且有:

3.2 入射信号与弹体旋转面夹角
定义Gc为入射信号单位矢量L1在由L1组成的载体坐标系中的坐标,L1在地理坐标系的坐标为Gn,L1在弹体坐标系的坐标为Gb,是载体坐标系中的单位矢量,而且有:

根据弹体发射瞬间的卫星星历数据,可以推算出入射信号L1在地理坐标系中的欧拉角其中,nγ为0。由此可得入射信号L1在地理坐标系的坐标
由L1组成的载体坐标系可以看作地理坐标系绕Ozn轴转动nθ,绕Oyn轴转动nψ得到的新坐标系。因此,载体坐标系中的单位矢量在地理坐标系中的坐标为

式中,表达式L(γ,ψ, )θ为两个坐标系转换的方向余弦矩阵。
已知弹体相对于地理坐标系的姿态角分别为航向角bψ、俯仰角bθ和横滚角bγ。将弹体坐标系与地理坐标系重合,再分别绕Ozn、和Oxn轴,依次转过俯仰角bθ、航向角bψ和横滚角bγ就得到弹体坐标系根据入射信号与弹体旋转面的夹角β的定义,β值与弹体旋转无关,令横滚角bγ等于0,弹体坐标系中的坐标Gb为

式(20)表示了入射信号单位矢量在入射信号载体坐标系的坐标和在弹体坐标系的坐标之间的换算关系,将入射信号的单位矢量坐标经过两次矩阵变换,变换为弹体坐标系的坐标。
因此入射信号L1在弹体坐标系的坐标为


3.3 多普勒频移和相位偏移的估计
载波频移与转速n和夹角β的关系由式(4)表示,其中,sin(2πnt+)α项与转速和初始夹角有关。实时计算过程中,转速与时间的乘积容易引入累积误差,使得计算误差随时间增大,而sin(2πnt+)α项表示了横滚角的变化,因此,为了消除累积误差的影响,用磁传感器测得的弹体横滚角的函数sinγ替代sin(2πnt+)α项。
弹体高速旋转引起的载波频移Δf可表示为


4 仿真试验
弹体的高速旋转使得锁相环承受了过大的动态应力,对载体姿态的解算可以实时估计接收机天线相位中心的速度、加速度和加加速度,通过补偿接收机的载波多普勒频移和相位偏移,降低与信号跟踪有关的载波跟踪门限,增强接收机的信号跟踪能力。
弹体高速旋转引起的载波频移和载波相位变化量的计算分为5个步骤:
1)由式(14)和式(15)计算弹体俯仰角bθ;
2)由弹体旋转一圈的时间计算弹体转速Vγ;
3)由式(13)计算弹体横滚角bγ;
4)由式(22)计算入射信号与弹体旋转面夹角β;
5)由式(23)和式(24) 计算弹体载波频移Δf和相位偏移
假设弹体航向角bψ等于π/6,初始俯仰角bθ等于π/3,弹体沿旋转面作匀减速旋转运动,横滚角初速磁传感器 S2与Oxb轴夹角λ=π/4,磁传感器噪声取均值为0且方差为0.01的随机白噪声,采样周期T为0.1 ms。
弹体旋转产生的三阶锁相环动态应力误差eθ,与接收机在卫星观测方向上相对于卫星的加加速度有关,即与弹体转速n、几何中心和相位中心误差值r0、弹体横滚角γb0以及入射信号的夹角β有关。为方便比较,用均方根值dNRRMS/dtN表示加加速度的大小。10次仿真结果取平均值,原始数据、极值比值法和积分比值法补偿后的加加速度分别为39 664.8 m/s3、4092.5 m/s3、2 990.4 m/s3。
图5表示无辅助的原始数据环路跟踪误差在载噪比C/N0不同时与BL的关系,说明弹载接收机三阶锁相环能够稳定跟踪的跟踪门限是载噪比C/N0达到约36.5 dB·Hz。
图6和图7分别说明经过极值比值法、积分比值法解算载体姿态的辅助补偿后,弹载接收机三阶锁相环能够稳定跟踪的跟踪门限载噪比C/N0分别下降为33.2 dB·Hz、32.8 dB·Hz,同时,环路带宽也从 190 Hz分别下降为88 Hz、80 Hz,更小的环路带宽可以显著增加GNSS的定位精度。

图5 原始数据的三阶锁相环相位误差Fig.5 Three-order phase-locked loop phase error of raw data

图6 极值比值法补偿后的三阶锁相环相位误差Fig.6 Three-order phase-locked loop phase error of the extremum ratio method
经过极值比值法、积分比值法解算载体姿态的辅助补偿后,弹载接收机的三阶锁相环载噪比C/N0门限值分别减少了 3.3 dB·Hz、3.7 dB·Hz,环路带宽分别减小了102 Hz、110 Hz,使得弹载接收机的跟踪性能显著提高。

图7 积分比值法补偿后的三阶锁相环相位误差Fig.7 Three-order phase-locked loop phase error of the integral ratio method
5 结 论
弹体的高速旋转使得弹载GNSS信号接收机锁相环承受了过大的动态应力,以致弹载接收机相位测量误差难以稳定在跟踪门限内。
磁传感器辅助弹载接收机的方法利用了两个非正交磁传感器测量弹体姿态,估计出弹体旋转引起的多普勒频移和相位偏移,补偿弹体高速旋转引起的动态效应。文中给出了磁传感器测量弹体姿态的极值比值法和积分比值法,推导了弹体姿态与旋转引起的多普勒频移和相位偏移的关系表达式。
仿真试验表明,基于磁传感器弹体姿态检测的补偿算法——极值比值法和积分比值法,使得弹体旋转引起的卫星载波多普勒频移和载波相位偏移大大减小,能够有效降低旋转引起的高动态对捕获和载波跟踪环路的影响。同时,经过磁传感器姿态估计算法的辅助,弹载接收机的三阶锁相环载噪比C/N0门限值减少了至少3 dB·Hz,环路带宽减小了至少100 Hz,使得弹载接收机的跟踪性能显著提高。
本文提出的利用磁传感器测量弹体姿态,辅助弹载接收机跟踪环路的方法,为弹载接收机高旋条件下实现GNSS信号的稳定跟踪,提供了新的思路。
(References):
[1]刘伟伟.多频全向 GNSS天线的设计[D].安徽: 安徽大学, 2016.Liu W W.Design of Multi-band Omnidirectional GNSS Antennas[D].Anhui: Anhui University, 2016.
[2]Rogers J, Costello M.A low-cost orientation estimator for smart projectiles using magnetometers and thermopiles[J].Navigation, 2012, 59(1): 9-24.
[3]Nasrolahi S S.Design of an analytical fault tolerant attitude determination system using Euler angles and rotation matrices for a three-axis satellite[J].Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2013, 228(2): 706-726.
[4]申强, 王猛, 李东光.旋转条件 GPS接收信号频率和相位变化分析[J].北京理工大学学报, 2009, 29(1):35-37.Shen Q, Wang M, Li D G.Analysis on frequency and phase of received GPS signal in condition of spinning[J].Transactions of Beijing Institute of Technology, 2009,29(1): 35-37.
[5]李耀军, 张江华, 费涛, 等.基于单天线GPS载波幅度的旋转载体滚转角测量[J].火控雷达技术, 2014, 43(3):6-11, 16.Li Y J, Zhang J H, Fei T, et al.Single antenna GPS carrier amplitude based rolling angle determination of spinning vehicle[J].Fire Control Radar Technology, 2014, 43(3):6-11, 16.
[6]王涛, 王海川, 梁燊.基于GPS载波相位差的炮弹滚转角测量方法[J].指挥控制与仿真, 2014, 36(1): 71-73, 83.Wang T, Wang H C, Liang S.Measurement method of projectile roll angle based on GPS phase differrence[J].Command Control & Simulation, 2014, 36 (1): 71-73, 83.
[7]Yu J, Bu X Z, Xiang C, et al.Spinning projectile’s attitude measurement using intersection ratio of magnetic sensors[J].Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering,2016, 231(5): 866-876.
[8]Yu J, Bu X Z, Xiang C, et al.Spinning projectile’s attitude measurement using background magnetic field compensation[J].Journal of Applied Remote Sensing,2016, 10(1): 014001.
[9]Xiang C, Bu X Z, Yang B.Three different attitude measurements of spinning projectile based on magnetic sensors[J].Measurement, 2014, 47(1): 331-340.
[10]Zhu J L, Wu P L, Bo Y M.A novel attitude estimation algorithm based on the non-orthogonal magnetic sensors[J].Sensors, 2016, 16(5): 730.
[11]傅金琳, 赵子阳, 李醒飞, 等.惯导速度辅助接收机跟踪环路算法[J].中国惯性技术学报, 2016, 24(3):330-336.Fu J L, Zhao Z Y, Li X F, et al.INS velocity-aided receiver tracking loop algorithm[J].Journal of Chinese Inertial Technology, 2016, 24(3): 330-336.
Novel assisted carrier tracking loop based on magnetic sensors for the projectile receiver
ZHU Jian-liang, WU Pan-long, BO Yu-ming
(Automation College, Nanjing University of Science and Technology, Nanjing 210094, China)
Concerning on the characteristics of high-spin projectile receiver, a method of projectile attitude measurement by magnetic sensors is proposed to compensate the Doppler shift and phase shift caused by the projectile’s spin.Firstly, according to the characteristics of projectile trajectory, the expression of the frequency shift and the phase shift caused by the projectile’s spin and the expression of the projectile attitude are derived.Secondly, the relationship between the tracking threshold of the projectile receiver’s tracking loop and the dynamic stress is studied.Then, the algorithms of the measurements of projectile attitude by magnetic sensors in the system of projectile body coordinate are given, which are the extreme value ratio method and the integral ratio method.The simulation results show that estimating the projectile attitude by magnetic sensors can effectively reduce the tracking threshold of the tracking loop of the projectile receiver,and the carrier to noise ratio and the loop bandwidth are reduced by 3 dB·Hz and more than 100 Hz,respectively.The GNSS signal tracking capability of the projectile receiver can be improved effectively.
projectile receiver; high spin; magnetic sensor; tracking threshold; integral ratio method
U666.1
A
1005-6734(2017)05-0650-06
10.13695/j.cnki.12-1222/o3.2017.05.016
2017-05-23;
2017-08-30
国家自然科学基金(61473153);江苏省“六大人才高峰”项目(2015-XXRJ-006);航空科学基金(2016ZC59006);江苏省产学研联合创新资金-前瞻性联合研究项目(BY2016004-04);中央高校基本科研业务费专项资金(30916011335)
朱建良(1980—),男,助理研究员,博士,从事导航定位方面的研究。E-mail: zjl_njust@sina.com
联 系 人:吴盘龙(1978—),男,副研究员,博士生导师,从事目标跟踪、导航定位方面的研究。E-mail: plwu@163.com
