基于多项式拟合的抗干扰惯性系对准算法
2017-12-02胡华峰
胡华峰,刘 明,李 旦
(湖北航天技术研究院总体设计所,武汉 430040)
基于多项式拟合的抗干扰惯性系对准算法
胡华峰,刘 明,李 旦
(湖北航天技术研究院总体设计所,武汉 430040)
针对包含阵风、发动机振动、人员上下车等环境下进行惯性系对准时因惯性器件偏差及外界扰动带来的比力干扰导致离散化解算对准精度差的问题,在对惯性系对准过程中的参考矢量进行了详细推导分析的基础上,提出将多项式拟合应用到惯性系对准中。该算法对整个对准过程中的视速度进行多项式拟合,利用拟合后的视速度代替容易受扰动引起跳变的单周期输出。仿真及测试结果表明,相比于不进行拟合的传统方案,该方案能明显提升对准精度,方位对准精度提高了7倍以上,能方便地进行工程应用,且工程应用效果好。
抗干扰;惯性系;多项式拟合;初始对准
惯性导航系统(INS)中一个十分重要的问题就是其初始对准问题[1]。惯性导航系统的初始对准,是指导航系统尚未进入导航工作状态之前,确定载体坐标系与导航坐标系之间的关系,为导航计算提供必要的初始条件,因此,惯导系统初始对准的好坏,将直接关系到惯导工作性能的好坏[2]。
传统固定位置的静基座粗对准方法是根据陀螺仪对地球自转角速度的测量值和加速度计对地球重力加速度的测量值来计算出载体的初始姿态矩阵。在实际对准过程中经常受到外界的复杂干扰[3],如阵风、海浪摇摆、发动机振动、人员上下车等扰动环境,车载惯导系统中陀螺仪和加速度计的输出信号中包含了因载体摆动而产生的误差信息。如果不及时补偿这种误差,直接采用静基座粗对准方法进行初始粗对准,将产生较大的粗对准误差,使系统的精对准时间延长甚至无法进入精对准阶段[4]。
目前,为了解决载体在较大幅度晃动下的对准问题,常用惯性系对准方案解决在晃动基座上的对准问题[5-7]。惯性系对准方案对摇摆基座和存在垂荡、横荡、纵荡或者干扰近似是周期性的干扰时(即在对准时间内通过积分运算,正、负部分能基本抵消)有较好的性能。该方案可以有效地分离载体由于摇摆而产生的加速度干扰,以此达到高精度的对准。法国IXSEA 公司的PHINS 采用的就是基于惯性系的对准方案。
在实际工程应用中,惯性器件偏差及扰动运动的影响会导致加速度计的输出在惯性系下的投影中存在干扰加速度信息。如何消除干扰的影响得到相对纯净的重力加速度信息是惯性系对准的关键所在。有学者提出了频域内滤波器(IIR 或FIR 低通滤波器)来提取惯性系下参考矢量,从而实现对准的方案[8-9]。文献[10-11]提出利用小波滤波的方法进行预处理降低器件噪声,提升对准精度。文献[12]针对振动干扰的影响,分析了初始导航惯性系下参考矢量的时域特性,提出了参考矢量的最小二乘拟合模型,根据该模型设计了抗干扰重力加速度积分粗对准算法,最后通过仿真验证了算法的有效性,但未给出详细的线性表达式、直接的拟合阶次分析及工程应用考核。
本文针对工程应用中用离散化方式进行惯性系粗对准时对振动干扰抑制能力差的问题,对惯性系对准过程中的参考矢量进行详细推导,给出了BI0系(初始捷联惯导惯性坐标系,0时刻与体系重合)下视速度的线性表达式,并提出采用多项式拟合的方式对进行拟合,利用拟合结果进行对准解算。通过仿真分析及试验验证了该算法的有效性。
1 惯性系对准算法

其中:N为导航坐标系;B为载体坐标系;EI′0为初始时刻地球惯性坐标系。在准静基座情况下:

式中:0λ和L0分别为对准起始t0时刻捷联惯组的经度和纬度。求得矩阵之后,姿态矩阵的实现就转换为求解为捷联惯导相对于初始时刻惯性空间的变换矩阵。可将进一步拆写成:

式中:利用陀螺输出的角运动信息,通过捷联惯导姿态更新式可以求得矩阵即


将式(5)改写如下:


在准静基座情况下(即载体无对地运动,地速为零),N系对地速度及加速度为零,代入式(7)可得:

将式(8)两边从t0时刻到t时刻同时积分,可得:

其中:
分别取t=t1和t=t2两个对准过程中的不同时刻,根据矩阵构造算法即可求得常值矩阵即

2 多项式拟合平滑视速度
在工程实际应用中,以离散化方式计算BI0系下视速度时,容易因单采样周期间器件输出的跳变导致输出不稳定,影响对准结果。本节研究对进行多项式拟合的方法。由第1节知:


其中:


考虑对准时间一般较短,ωIEt为小量,忽略三阶及以上项,有:

因此式(17)可以简化为
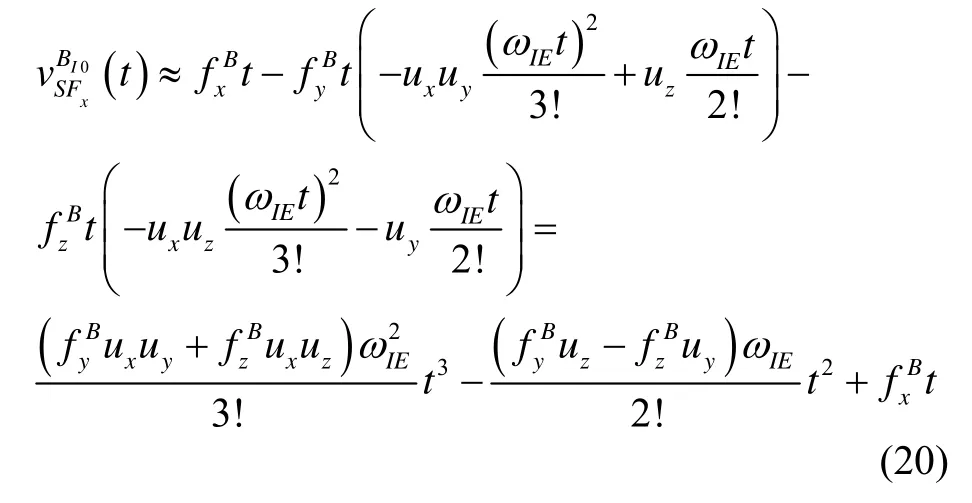
同理,

因此,可以采用多项式拟合。
为验证上述推到与数学仿真的吻合程度,不失一般性假设在进行对准时初始载体系与当地水平系重合,XY轴水平,有:

因此,



3 仿真分析
为了验证上述多项式拟合分析的正确性,进行数据仿真分析。
3.1 无器件误差的仿真
设惯性器件无误差,进行惯性系对准仿真计算,并实时输出解算中间数据,初始体坐标系与导航系重合,仿真计算时长为30 s。

图1 视速度计算值Fig.1 Calculated values of specific velocity

图2 视速度拟合误差Fig.2 Fitted values of specific velocity
为充分分析上述拟合对对准结果的影响,分别采用一阶、二阶、三阶、四阶拟合进行对准仿真,仿真结果如表1所示(方位真值为270°)。
从表1中可以看出,在无器件误差的情况下无需拟合,采用一阶和二阶拟合对对准精度有影响,采用三阶、四阶不影响对准精度。
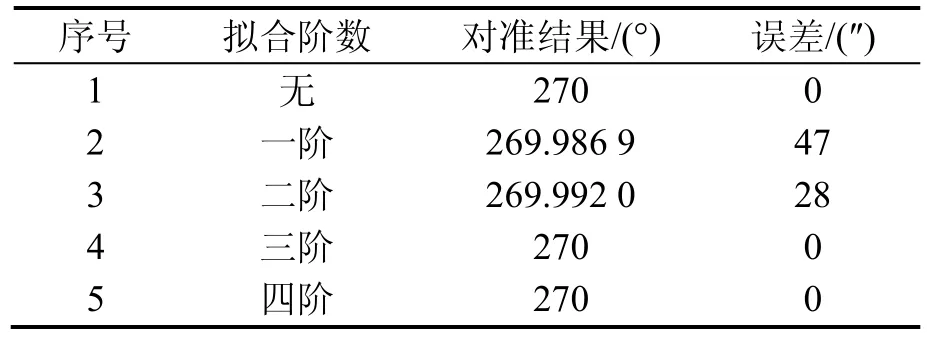
表1 无误差不同拟合阶数对准结果Tab.1 Fitted results without IMU error
3.2 含器件常值误差的仿真
仿真用器件常值误差如表2所示。加入上述条件的器件常值误差后,仿真结果如表3所示。
从表2~3中可以看出,在仅包含常值误差时,三阶、四阶拟合的对准结果与无拟合的效果相当,一阶、二阶拟合对对准精度有影响,误差有抵消的作用,为了更真实地反映拟合效果,需进行含器件随机误差和振动环境的仿真。

表2 常值误差参数表Tab.2 IM U constant error

表3 常值误差不同拟合阶数对准结果Tab.3 Fitted results with constant IMU error
3.3 含器件随机误差的仿真
在上述常值误差的基础上加入随机误差,并进行蒙特卡洛仿真。随机误差如表4所示。
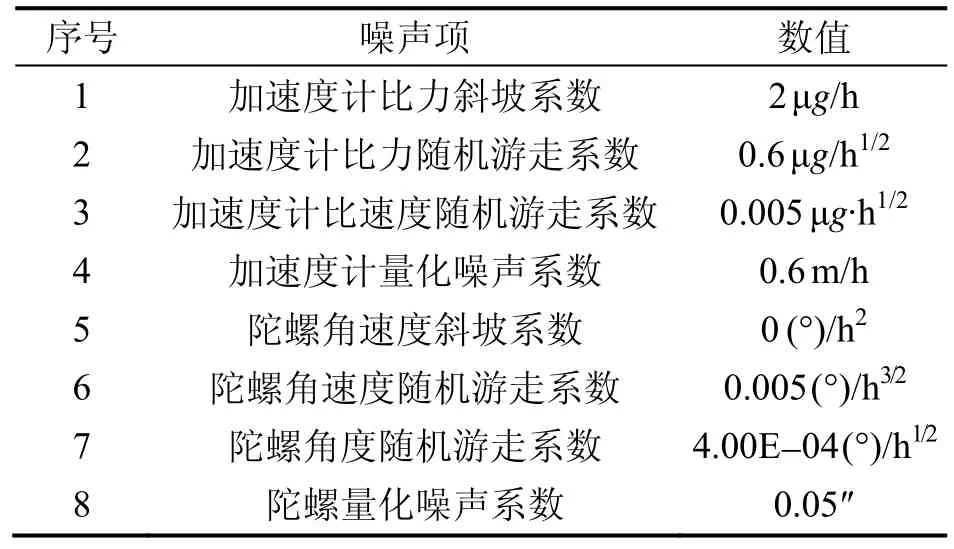
表4 随机噪声参数表Tab.4 IM U random noise
200次蒙特卡洛仿真如表5所示(3倍均方根)。
从表5可以看,二阶及以上拟合结果明显好于无拟合结果,验证了该方案的可行性。

表5 蒙特卡洛仿真不同拟合阶数对准结果Tab.5 Fitted results with Monte Carlo
3.4 振动环境的仿真
为了能仿真分析该方案在振动条件下的效果,将某型号惯组在试验车上采集的静态数据进行去除趋势项的噪声提取,将噪声加入上述仿真器件输出进行对准仿真,仿真结果如表6所示(3倍均方根)。
从表6可看出该方案的有效性,二阶及以上阶次的拟合相对于无拟合方案的精度提升了一个数量级。

表6 振动仿真不同拟合阶数对准结果Tab.6 Fitted results with vibration noise
4 测试试验验证
为了验证该方案在工程中的应用效果,通过实际惯组进行测试验证,验证内容包括静态对准测试、动态对准测试。
4.1 静态对准测试
采集某型号用惯组在大理石平台上的8 h数据,利用各对准时间段(30 s)的数据进行对准离线分析,求取多个对准簇对准结果的稳定性(3倍标准差),结果如表7所示。
从表 7可以看出,采用二阶、三阶、四阶拟合效果相差不大,比不采用拟合及一阶拟合的稳定性要好很多。上述试验结果表明,在没有振动干扰的条件下,仅器件噪声也能对惯性系对准精度产生影响,导致对准精度降低,通过采用拟合的方法可以有效提升对准精度。
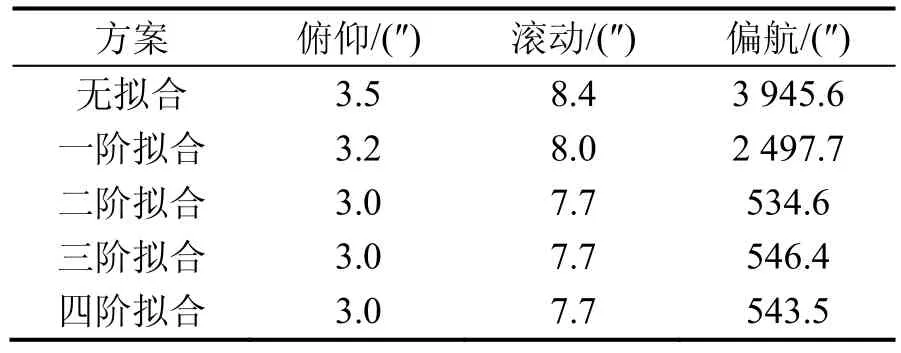
表7 静态对准稳定性测试结果Tab.7 Fitted results with static test
4.2 动态对准测试
将某型号惯组放置在专用试验车上进行动态对准测试,开启车辆的底盘发动机和设备供电发电机,中途有人员上下车,共进行6个不同方位的试验,每个方位进行8次试验,每次对准时间为30 s,每次试验结束后静止1 min,统计8次试验的稳定性(3倍标准差),以此判断对准精度。不同方位在不同拟合方案下的结果如表8所示。
从表8可以看出,在惯组处于振动情况时,不进行拟合处理的惯性系对准将出现较大误差,最大约17°,明显超出振动幅度,当进行二阶以上拟合后,最大约2.5°,精度提升明显。上述试验结果表明,基于多项式拟合的抗干扰惯性系粗对准算法能有效抑制外界振动环境带来的比力干扰。

表8 动态对准稳定性测试结果Tab.8 Fitted results with dynamic test
5 结 论
惯性系对准能较好地解决了振动条件下的对准问题,在实际工程中得到了广泛应用,但在以离散化方式计算BI0系下视速度时,容易因惯性器件偏差及扰动带来的加速度干扰信息导致输出不稳定,影响对准结果。本文在详细分析惯性系对准中视速度解算方法的基础上,提出了利用多项式拟合的分析方法。详细分析了拟合阶次,并进行了仿真分析和实物测试验证。仿真及测试结果表明,相比于不进行拟合的传统方案,该方案能明显提升对准精度。
(References):
[1]Liu X X, Zhao Y, Liu X J, et al.An improved self- alignment method for strapdown inertial navigation system based on gravitational apparent motion and dual-vector[J].Review of Scientific Instruments, 2014, 85(12): 125108.
[2]徐晓苏, 刘心雨.一种改进的粒子滤波算法在SINS初始对准中的应用[J].中国惯性技术学报, 2016, 24(3): 299-305.Xu X S, Liu X Y.Improved particle filter algorithm in SINS initial alignment[J].Journal of Chinese Inertial Technology, 2016, 24(3): 299-305.
[3]Li J, Xu J, Chang L, et al.An improved optimal method for initial alignment[J].Journal of Navigation, 2014,67(4): 727-736.
[4]王志伟, 秦俊奇, 杨功流, 等.炮载捷联惯导晃动误差补偿方法[J].中国惯性技术学报, 2017, 25(1): 37-42.Wang Z W, Qin J Q, Yang G L, et al.Compensation method for vehicle-body shaking errors of gun-board SINS[J].Journal of Chinese Inertial Technology, 2014, 67(4): 727-736.
[5]Liu Y H, Liu M Y, Teng H J, et al.Anti-jamming alignment method for rotary RLG SINS[J].Journal of Chinese Inertial Technology, 2012, 20(6): 654-657.
[6]崔鹏程, 邹志勤, 王翌, 等.杆臂效应误差对晃动基座粗对准的影响[J].中国惯性技术学报.2013, 21(4): 462-466.Cui P C, Zou Z Q, Wang Y, et al.Influence of lever-arm effect error on coarse alignment on shaking base[J].Journal of Chinese Inertial Technology, 2013, 21(4): 462-466.
[7]Liu X J, Li Y T.Fast alignment algorithm of inertial fixed frame in quasi-static environment[J].Journal of Chinese Inertial Technology, 2014, 22(4): 459-462.
[8]Wang R Y, Liu W C, Bian H W, et al.Fast alignment algorithm with order-reduced filter for SINS[J].Journal of Chinese Inertial Technology, 2016, 24(5): 607-618.
[9]Li Q, Ben Y Y, Sun F.A novel algorithm for marine strapdown gyrocompass based on digital filter[J].Measurement, 2013, 46(1): 563-571.
[10]黄凤荣, 高峰, 付中泽, 等.基于小波滤波的激光陀螺SINS晃动基座初始对准[J].中国惯性技术学报, 2014,22(2): 157-160.Huang F R, Gao F, Fu Z Z, et al.Wavelet used in initial alignment of SINS on a rocking base[J].Journal of Chinese Inertial Technology, 2014, 22(2): 157-160.
[11]Qin F J, Li A, Xu J N.Improved fast alignment method of strapdown INS using bidirectional processes and denoising[J].Journal of Chinese Inertial Technology,2014, 22(4): 453-458.
[12]赵长山, 秦永元, 魏亮.抗干扰重力加速度积分粗对准算法[J].宇航学报, 2010, 31(10): 2335-2339.Zhao C S, Qin Y Y, Wei L.A gravity-based antiinterference coarse alignment algorithm[J].Journal of Astronautics, 2010, 31(10): 2335-2339.
Anti-disturbance inertial-frame alignment algorithm based on polynomial fitting
HU Hua-feng, LIU Ming, LI Dan
(Overall Designing Institute of Hubei Space Technology Academy, Wuhan 430040, China)
Inertial-frame alignment accuracy will be affected by various specific-force-disturbing factors such as gusts of wind, vehicle vibration, loading, offloading, and sensor noise.To solve this problem, the reference vectors used in inertial-frame alignment is deducted and analyzed, and then a polynomial fitting method is proposed.The method fits the specific velocity within the whole alignment duration by polynomials, and uses the fitted vectors instead of the original cyclic-calculated vectors which are easily disturbed.Simulation and experiment results show that the new method can accomplish the alignment with higher precision.The alignment accuracy of INS is improved by more than 7 times.In addition, the new method can be easily applied in engineering.
disturbance; inertial frame; polynomial fitting; initial alignment
V249.3
A
1005-6734(2017)05-0571-05
10.13695/j.cnki.12-1222/o3.2017.05.003
2017-05-14;
2017-08-18
武器装备“十三五”预研资助(30401020402)
胡华峰(1986—),男,工程师,主要从事惯性技术研究。E-mail: h-hfeng@163.com
