土木工程结构模糊滑模分散控制(DFSMC)研究
2017-11-04潘兆东周福霖
潘兆东, 谭 平, 周福霖,3
(1. 东莞理工学院 建筑工程系,广州 东莞 523808; 2. 广州大学 工程抗震研究中心,广州 510405; 3. 湖南大学 土木工程学院,长沙 410082)
土木工程结构模糊滑模分散控制(DFSMC)研究
潘兆东1,3, 谭 平2, 周福霖2,3
(1. 东莞理工学院 建筑工程系,广州 东莞 523808; 2. 广州大学 工程抗震研究中心,广州 510405; 3. 湖南大学 土木工程学院,长沙 410082)
为了有效处理土木工程结构分散振动控制中子系统间关联项及外界荷载不确定性的影响,提出了模糊滑模分散控制算法(DFSMC)。通过引进Lyapunov函数设计了仅依赖于作动器所在层位移和速度响应反馈信息的滑模分散控制律,在此基础上,利用模糊控制系统自适应地调节滑模分散控制律的切换增益,进而建立了模糊滑模分散控制算法(DFSMC)。针对ASCE 9层Benchmark模型进行分散控制设计与集中控制设计及仿真分析。结果表明,分散控制策略较传统集中控制有更好的控制效果,且各子系统内作动器均能充分发挥作用,表明了这种分散控制算法具有很高的工程应用价值。
主动控制;分散控制;模糊控制;滑模控制;Lyapunov函数
对于大型结构,传统集中控制将使得整个控制系统信息交换异常复杂且极易造成滞后,从而导致控制系统集成和运行成本提高,系统的可靠性降低;另外,一旦个别传感器或作动器发生故障,则容易导致整个控制系统失效,可能造成人员和财产的巨大损失。因此,从系统的实时性、可靠性和经济性等方面考虑,将分散控制应用到大型复杂土木工程结构振动控制中便具有了十分重要的现实意义。
在分散控制中,每个子系统控制器只能获得结构的部分信息(信息分散化),利用这些局部信息构成控制律,对结构局部进行控制(控制分散化),便于对出现在局部的干扰做出快速响应[1]。土木工程领域的分散控制研究主要集中在以下方面:Lynch等[2]利用基于市
场机制的分散控制方法获得了较好的控制效果;Xu等[3]提出了一种基于神经网络适用于悬索系统的分散主动控制方法;Rofooei等[4-5]先后研究了基于瞬时最优和滑动模态的分散控制方法;Ma等[6]提出了具有鲁棒特性的分散控制方法;孙万泉等[7]研究了基于LMI的高层结构H∞、H2分散控制方法。Loh等[8]在地震作用下采用MR阻尼器,分析了集中控制和分散控制策略;李宏男等[9]比较了分散次优控制和分散最优控制等算法的控制效果;Wang等[10-11]研究了考虑时滞的LQR与H∞分散控制方法;汪权等[12]将分散模糊迭代学习方法应用于高层结构振动控制中;王建[13]基于Lyapunov稳定性理论设计了一种自适应模糊分散控制算法;蒋扬等[14]提出一种基于建筑物相邻四层信号的鲁棒分散控制方法;雷鹰等[15]提出一种以最小二乘法依次对子结构“附加未知扰动”进行估计的瞬时最优分散控制方法。
本文对土木工程结构的分散控制问题进行研究,利用Lyapunov函数方法设计了滑模分散控制算法,在此基础上,结合模糊逻辑理论,提出了适用于结构振动控制的模糊滑模分散控制算法(DFSMC),其利用模糊控制器在线实时调节滑模分散控制律的切换增益以消除子系统间相互作用力的影响。对ASCE 9层Benchmark模型进行分散控制设计与集中控制设计,仿真分析结果表明,在不同的地震作用下,模糊滑模分散控制算法均能够有效地抑制结构的地震响应,同时,该算法能保证各子系统作动器发挥最大功效。
1 滑模分散控制器设计
1.1 集中控制系统状态方程的分散化
在地震激励作用下,n层建筑集中控制的状态方程为

(1)
式中:

假设原大系统分散后存在N个子控制通道, 任一子系统状态方程表示为(针对结构完全分散控制,如图2(b)所示)
(2)

(3)
以上状态方程可以描述为
(4)

1.2 滑模分散控制律的确定
定义如下全局滑模面
(5)
跟踪误差定义为
e=xid-xi
(6)
式中,xid为子系统的期望响应。
设计滑模控制律为
(7)
以下对该滑模分散控制算法的稳定性进行证明。定义Lyapunov函数为
(8)
对其求导则有
(9)
将控制律式(7)代入式(9),得
(10)


(11)

2 模糊自适应调节切换增益

表1 模糊控制规则表Tab.1 Fuzzy control rules
根据言之有据、计算简便和连续性这三条准则[16],这里选择中心平均解模糊器为本文的解模糊器。
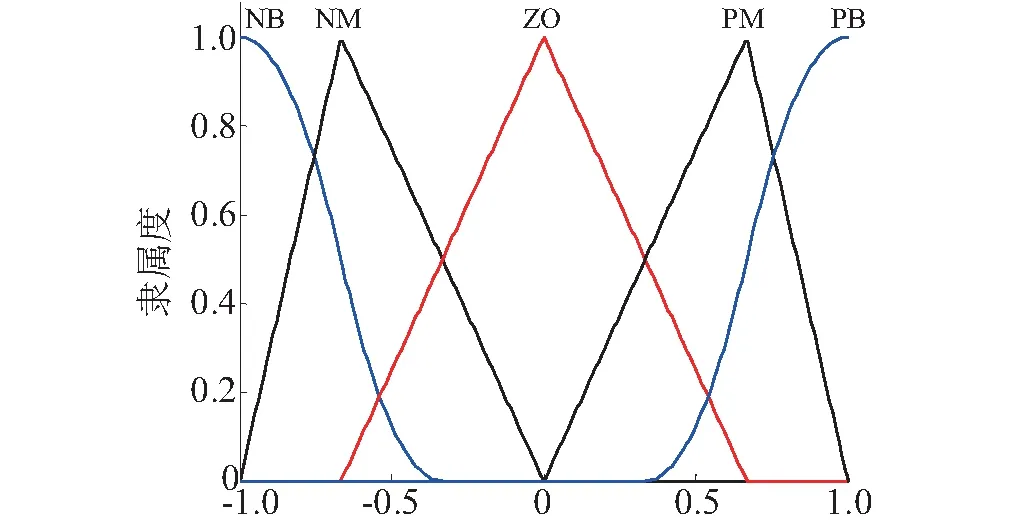
图1 输入和输出变量的归一化隶属函数Fig.1 Normalized membership functions of input and output variables
3 仿真分析
选取ASCE设计的9层钢结构Benchmark模型[17]作为仿真算例。采用静力凝聚法对原有限元模型进行降阶后仅保留9个平动自由度。为了验证所提出的模糊滑模分散控制算法,选择两条远场地震波和一条近场地震波:El Centro波、Hachinohe波和Kobe波地震激励,持时40 s,统一调幅至300 cm/s2。考虑到篇幅及不同地震激励下分析结果具有相似的规律,本文在进行减震效果分析时,仅以 El Centro地震激励下的响应进行绘图及说明本文的分析结果,Hachinohe和Kobe激励下的结果见表 2。
在结构每层均布置作动器,单个作动器最大出力为800 kN。本文算例中集中控制采用LQG控制算法,其最优控制律通过极小化如下目标函数来获得
(12)
式中,Q=10αI2n×2n,R=In×n。

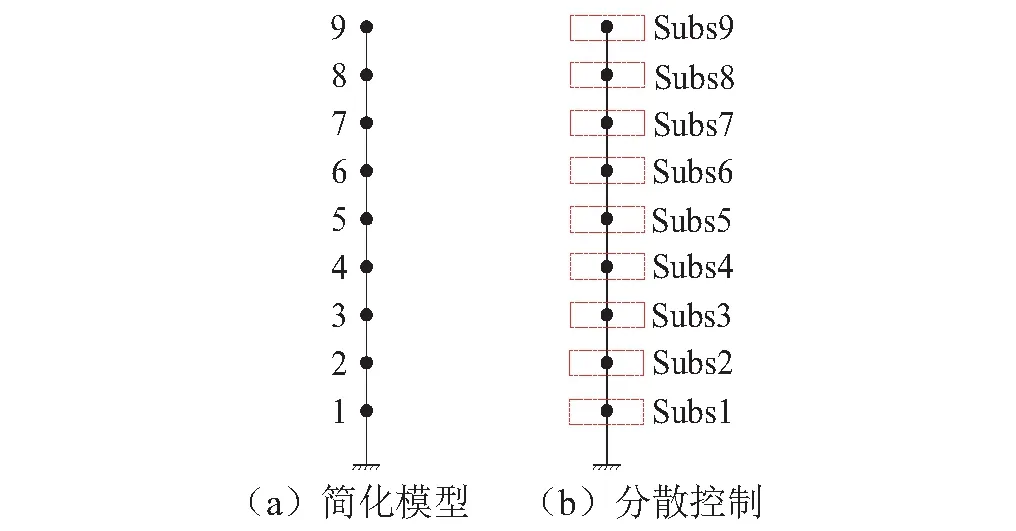
图2 结构简化模型图及结构分散控制示意图Fig.2 Simplified model of the structure and the decentralized control schematic diagram
El Centro 地震波作用下,无控、集中控制与分散控制结构首层位移及顶层绝对加速度时程响应曲线分别如图3(a)和3(b)所示。通过图3(a)中不同控制策略间的比较,可以发现,模糊分散控制结构首层层间位移的峰值响应明显小于集中控制下的响应;同时,在地震动持时内,分散控制下的控制效果基本均好于集中控制的分析结果;从图3(b)可以看出,分散控制下结构顶层绝对加速度峰值响应较集中控制有轻微放大,然而,在地震动持时内,其控制效果则有一定改善。这是因为传统的集中控制方法确定的最优控制器仅能保证少数作动器发挥最大功效,而本文所设计的模糊滑模分散控制方法则可以针对性的对每个作动器设计控制参数,以使其达到最大功效,这一结论可以从子控制系统9的作动器出力时程曲线中得以验证。
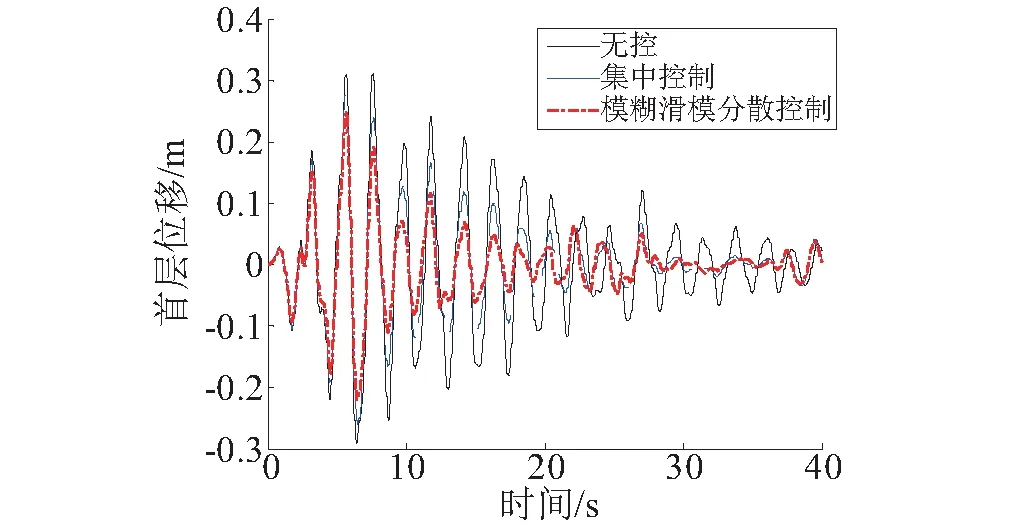
(a)首层位移
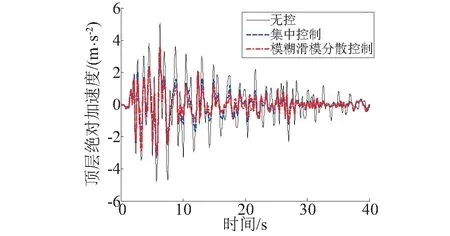
(b) 顶层绝对加速度图3 首层位移时程与顶层绝对加速度时程Fig.3 Simulation results: displacement response of the 1st floor and the absolute acceleration of the top floor
图4为 El Centro 地震波作用下分散控制子系统9在滑动模态控制时的切换增益的时程曲线。可以看出,在整个地震动持时内,模糊滑模分散控制算法根据结构的状态响应,利用模糊逻辑系统很好地实现了切换增益的时变调节,从而获得一种瞬时最优的工作状态。图5为集中控制与分散控制策略下结构顶层(即分散控制子系统9)作动器控制力时程对比曲线,可以看出,较集中控制而言,DFSMC可以获得更为理想的出力时程,控制力时程曲线光滑,未出现抖振现象,且不超过规定限幅。图6为集中控制与完全分散控制策略下结构各层作动器控制力峰值及控制力均方根值对比曲线。图6说明本文所提出的方法可以使每一个分散控制装置在出力限幅内以最大功效对相应子系统进行控制,因而其结构响应的控制效果有所改善。

图4 子系统9的时变切换增益Fig.4 Time variant switching gain of subsystem 9
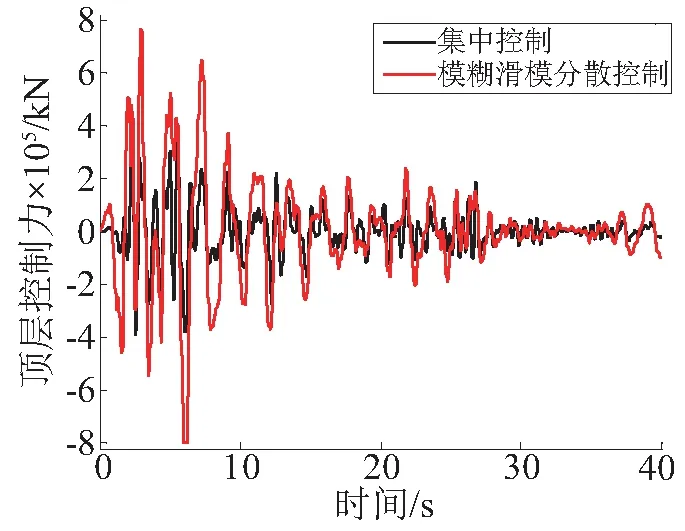
图5 子系统9(顶层)控制力Fig.5 control force of subsystem 9(top floor)

图6 结构控制力峰值和控制力均方根值 Fig.6 Simulation results: maximum control force and Rms values of control force
El Centro地震激励下无控结构、集中控制及模糊滑模分散控制的结构最大层间位移角、最大绝对加速度响应如图7所示。比较图7(a)和图7(b)中分散控制结构与无控结构的楼层响应图,可以发现,模糊滑模分散控制能很好的抑制结构各楼层的响应。其中,结构各楼层的层间位移角较集中控制而言有更好的控制效果,1~7层层间位移角峰值减震率依次提高24.1%,26.1%,40.7%,93.2%,72.5%,24.4%;而结构各楼层(首部分楼层外)绝对加速度控制效果则略差于集中控制(图8)。以上分析结果表明,本文所提出的模糊滑模分散控制算法能有效解决子系统间关联项等干扰因素的影响。

图7 结构各层最大层间位移角Fig.7 Simulation results: maximum inter-story drifts
参考Benchmark建筑模型的评价指标,表2给出了不同地震激励下,利用模糊滑模分散控制算法进行控制得到的评价指标值及集中控制LQG算法得到的评价指标平均值,其中,J1~J3分别为结构层间位移角峰值、绝对加速度峰值、基底剪力峰值,J4~J6分别为层间位移角、绝对加速度、基底剪力范数的峰值,J7为本文为反映结构阻尼耗能峰值而自定义的评价指标:
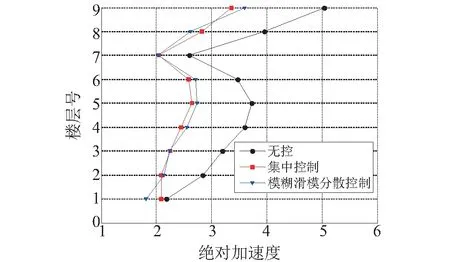
图8 结构各层最大绝对加速度Fig.8 Simulation results: maximum absolute accelerations
(13)
式中,EDi和EDiuc分别表示无控结构与有控结构第i层阻尼能。

表2 结构响应的相关评价指标Tab.2 Result of J indices
比较表2中分散控制与集中控制的评价指标,可以看出El Centro、Kobe和Hachinohe激励下分散控制评价指标均表现出相似的规律。同时,将分散控制评价指标平均值与集中控制评价指标平均值进行比较,可以发现,对于评价指标J1~J3,分散控制与集中控制有相近的控制效果;而对于范数的峰值指标J4~J6及阻尼耗能峰值指标J7,分散控制则表现出更好的控制效果,J4~J7控制效果依次提高:14.7%,8.9%,14.3%,21.4%。图9为El Centro激励下集中控制与模糊滑模分散控制下的结构响应评价指标结果柱状图。通过比较可以发现,模糊滑模分散控制算法得到的评价指标结果(除J2外)均优于集中控制。
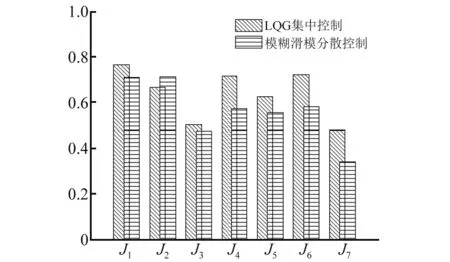
图9 评价指标柱状图Fig.9 Performance index
4 结 论
本文在结合模糊控制、滑模控制及分散控制优点的基础上提出了适合土木工程结构主动控制的模糊滑模分散控制(DFSMC)算法。当外界激励及子系统间关联项发生变化时,子控制器能够通过模糊控制器自适应地对切换增益进行在线调节。基于所提出的模糊滑模分散控制算法对9层Benchmark结构进行了结构分散控制设计及分析比较,仿真计算结果表明:
(1) 该算法能有效控制结构的地震响应,说明本文模糊滑模分散控制算法是有效、可行的。各子控制器利用所设计的模糊控制器在线实时调节滑模控制律的切换增益项,在保证控制效果的同时很好的处理了子系统间作用力的相互影响。
(2) 较集中控制策略而言,采用模糊滑模分散控制算法的分散控制策略对结构层间位移角减震效果有明显提高,其绝对加速度减震效果与集中控制相近;同时,模糊滑模分散控制算法下,结构响应各评价指标均得到一定程度的改善。
(3) 各子控制器的模糊滑模分散控制律仅依赖于作动器所在层的位移与速度响应反馈信息,在确保各子系统内作动器均能充分发挥作用的同时实现了各子系统的高效、独立自治,表明了这种分散控制算法具有很高的工程应用价值。
[1] 席裕庚.动态大系统方法导论[M].北京:国防工业出版社,1988: 60-61.
[2] LYNCH J P, LAW K H. Decentralized control techniques for large-scale civil structural systems[C]//Proc of the 20th Int Modal Analysis Conference. Los Angeles: IMAC XX, 2002.
[3] XU B, WU Z S, YOKOYAMA K. Neural networks for decentralized control of cable-stayed bridge[J]. Journal of Bridge Engineering, 2003, 8(4): 229-236.
[4] ROFOOEI F R, MONAJEMI-NEZHAD S. Decentralized control of tall buildings[J]. The Structural Design of Tall and Special Buildings, 2006, 15(2): 153-170.
[5] MONAJEMI-NEZHAD S, ROFOOEI F R. Decentralized sliding mode control of multistory buildings[J]. The Structural Design of Tall and Special Buildings, 2007, 16(2): 181-204.
[6] MA T W, XU N S, TANG Y. Decentralized robust control of building structures under seismic excitations[J]. Earthquake Engineering & Structural Dynamics, 2008, 37(1): 121-140.
[7] 孙万泉, 李庆斌. 基于LMI的高层建筑结构分散H2/H∞鲁棒控制[J]. 地震工程与工程振动, 2007(6): 218-222.
SUN Wanquan, LI Qingbin. DecentralizedH2/H∞robust control for large-scale building structure based on linearmatrix inequalities(LMI)[J]. Journal of Earthquake Engineering and Engineering Vibration, 2007(6): 218-222.
[8] LOH C H, CHANG C M. Application of centralized and decentralized control to building structure: analytical study[J]. Journal of Engineering Mechanics, 2008, 134(11): 970-982.
[9] 李宏男, 李瀛, 李钢. 地震作用下建筑结构的分散控制研究[J]. 土木工程学报, 2008, 41(9): 27-33.
LI Hongnan, LI Ying, LI Gang. Decentralized control of structures under earthquakes[J]. China Civil Engineering Journal, 2008, 41(9): 27-33.
[10] WANG Y. Wireless sensing and decentralized control for civil structures: theory and implementation[D]. Stanford: Stanford University, 2007.
[11] WANG Y, LYNCH J P, LAW K H. DecentralizedH∞controller design for large-scale civil structures[J]. Earthquake Engineering & Structural Dynamics, 2009, 38(3): 377-401.
[12] 汪权, 王建国, 裴阳阳. 地震作用下高层建筑结构的分散模糊迭代学习控制研究[J]. 计算力学学报, 2012, 29(5): 681-686.
WANG Quan, WANG Jianguo, PEI Yangyang. Decentralized fuzzy iterative learning control of tall buildings under earthquakes[J]. Chinese Journal of Computational Mechanics, 2012, 29(5): 681-686.
[13] 王建. 非线性不确定性结构自适应模糊分散控制理论与试验研究[D]. 哈尔滨:哈尔滨工业大学, 2011.
[14] 蒋扬, 周星德, 王玉. 建筑结构鲁棒分散控制方法研究[J]. 振动与冲击, 2012, 31(6): 37-41.
JANG Yang, ZHOU Xingde, WANG Yu. A robust decentranzed control method for architectural structures[J]. Journal of Vibration and Shock, 2012, 31(6): 37-41.
[15] 雷鹰, 伍德挺, 刘中华. 一种适用于大型工程结构的分散振动控制方法[J]. 振动工程学报, 2012, 25(4): 411-417.
LEI Ying , WU Deting , LIU Zhonghua. A decentralized vibration control algorithm for large-scale engineering structures[J]. Journal of Vibration Engineering, 2012,25(4): 411-417.
[16] 王立新. 模糊系统与模糊控制教程[M]. 北京:清华大学出版社, 2003: 84-85.
[17] OHTORI Y, CHIRSTENSON R E, SPENCER J B F. Benchmark control problems for seismically excited nonlinear buildings[J]. Journal of Engineering Mechanics 2004,130(4): 366-385.
[18] KIRKPATRICK S, VECCHI M P. Optimization by simmulated annealing[J]. Science, 1983, 220(4598): 671-680.
Adecentralizedfuzzyslidingmodecontrol(dfsmc)forcivilengineeringstructures
PAN Zhaodong1,3, TAN Ping2, ZHOU Fulin2,3
(1. Department Civil Engineering, Dongguan University of Technology, Dongguan 523808,China; 2. Earthquake Engineering Research & Test Center, Guangzhou University, Guangzhou 510405, China; 3. College of Civil Engineering, Hunan University, Changsha 410082, China)
A decentralized fuzzy sliding mode control algorithm (DFSMC) was proposed here for dealing with the influence of the interconnected terms of different subsystems and the uncertainty of the external loads. The Lyapunov function was employed to design the decentralized sliding mode control law, which depends only on the displacement and the velocity response of relevant story. And the switching gain of the decentralized sliding mode control law was adaptively adjusted by the fuzzy control system. The decentralized fuzzy sliding mode control algorithm (DFSMC) was further designed. The ASCE 9-story benchmark building was selected as a numerical example to illustrate the control performances of the proposed decentralized algorithm. Numerical simulation results indicate that this decentralized algorithm is very valuable in engineering application because the DFSMC algorithm can perform superior control performance when comparing with traditional centralized control, and can guarantee each of the actuators operating at maximum efficiency.
active control; decentralized control; fuzzy control; sliding mode control; Lyapunov function
国家自然科学基金资助项目(97315301-07;51408142);国家973项目(2012BAJ07B02);教育部创新团队项目(IRT13057)
2016-05-18 修改稿收到日期: 2016-07-31
潘兆东 男,博士生,1986年生
谭平 男,博士,研究员,博士生导师,1973年生
TH212;TH213.3
A
10.13465/j.cnki.jvs.2017.20.017
