基于SMA的可变频隔振器设计与实验研究
2017-11-04王进强李杰锋
王进强, 沈 星, 李杰锋
(南京航空航天大学 机械结构力学及控制国家重点实验室, 南京 210016)
基于SMA的可变频隔振器设计与实验研究
王进强, 沈 星, 李杰锋
(南京航空航天大学 机械结构力学及控制国家重点实验室, 南京 210016)
运载火箭在发射过程中会经历复杂的动力学环境,而普通的隔振器无法做到对高频冲击振动进行抑制的同时避免对低频振动的放大。利用形状记忆合金(SMA)作为驱动器,结合金属橡胶的刚度对形变量敏感的特点,设计了一种可改变自身固有频率的隔振器。在实验研究不同参数的金属橡胶隔振特性的基础之上,选用合适的金属橡胶作为可变频隔振器的隔振元件,并通过实验对比隔振器变频前后的共振频率差异。实验结果表明,所设计的可变频隔振器的固有频率从60 Hz以下提高到110 Hz以上,满足设计要求。
隔振器;SMA;金属橡胶;变频;半主动控制
随着我国航空航天事业的发展,对火箭、卫星等的稳定性和安全性要求越来越高,但是在它们的使用过程中往往经历较为复杂的动力学环境,引起结构破坏,局部失稳以及电子设备的指标漂移、精度降低、失灵等故障[1],因此研究振动控制的手段与方法有着极其重要的意义。
在振动控制研究中,一般根据振动控制过程中是否需要外部提供能量,将振动控制的方法分为主动控制、被动控制和半主动控制[2]。被动控制方法不需要外部对系统输入能量,在某些场合能取得不错的控制效果、其结构简单,易于实现,经济成本较低,但是被动控制方法缺乏灵活性,适应性较差;在此基础上,振动主动控制方法被提出,振动主动控制方法具有控制效果好,适应能力强的优点,但同时振动主动控制方法对系统配置要求高,经济成本较高,系统本身较为复杂并且会明显增加结构重量,不便于在航天器等重要敏感结构上使用;半主动控制方法,结合了主动控制与被动控制方法的优势,仅需外部提供少许能量,即可实现振动控制的目的,同时具有系统结构简单,稳定性好,经济代价小的优点。
目前半主动控制方法由于其独特的优势,引起了国内外学者的关注。对基于压电结构的半主动控制已经有了广泛的研究, 如Badel等[3]提出了一种基于压电机构的宽带半主动控制方法,季宏丽等[4]提出了一种基于同步开关阻尼技术的半主动振动控制方法。同样作为智能材料的形状记忆合金材料在半主动控制中也有着较为广泛的应用前景,如梅胜敏等[5]曾提出将形状记忆合金埋入复合材料,通过对形状记忆合金的加热和冷却改变结构的刚度,Liang等[6]曾提出用形状记忆合金制成弹簧,用于结构的振动控制中。普通的隔振器往往对高频振动有着较好的抑制效果,但是在固有频率附近的振动不仅不会抑制,还会产生振动放大。而航天器的发射过程中往往经历较为复杂的动力学环境,既有发射初始阶段的发动机低频振动的影响,也会经历火箭分离等阶段的高频振动,普通的被动隔振器往往会对低频振动进行放大,造成负面影响。形状记忆合计材料作为驱动器使用时,往往只需外部简单的通以直流电,就可以产生较大的驱动力和较为明显的形变量。因此利用形状记忆合金的特性,设计出一种半主动的隔振器,可弥补普通隔振器的缺陷。
基于此,本文提出一种利用形状记忆合金作为驱动器的半主动隔振器,原理如图1中所示。

图1 半主动隔振器原理图Fig.1 Schematic diagram of semi-active vibration isolator
可以在不同阶段对形状记忆合金丝通以直流电,产生驱动力,改变隔振器的固有频率,做到既能有效降低高频振动的影响,同时能避免对低频振动的明显放大。在阅读相关文献基础上,选用刚度对形变量较为敏感的金属橡胶材料作为核心隔振元件,研究不同参数对金属橡胶材料隔振性能的影响,并进一步确定合适的金属橡胶作为隔振元件,并进行相关实验,验证所设计的隔振器的固有频率的改变效果。
1 设计原理
1.1 隔振器结构设计
本文设计的可变频隔振器有两种状态,第一种状态下固有频率较低,可以较好地抑制高频冲击振动,第二种状态下固有频率较高,可以避免低频振动的放大。整个隔振器的结构设计如图2所示。金属橡胶作为隔振元件,形状记忆合金丝作为驱动器,在通过直流电加热以后,形状记忆合金驱动丝将由低温下的孪晶马氏体相向高温下的奥氏体相转变,并因此产生收缩,进而压缩金属丝网阻尼垫,导致其刚度增加,提高隔振器的固有频率。复位弹簧采用普通的螺旋弹簧,在直流电断开、驱动丝冷却后提供恢复力,使结构的固有频率降低到初始水平。导向螺杆用以保证驱动丝的位移方向,活动杆上端用来装夹被隔振物体。隔振器结构设计紧凑,可以简单地通以直流电流,便可实现隔振器固有频率的改变。
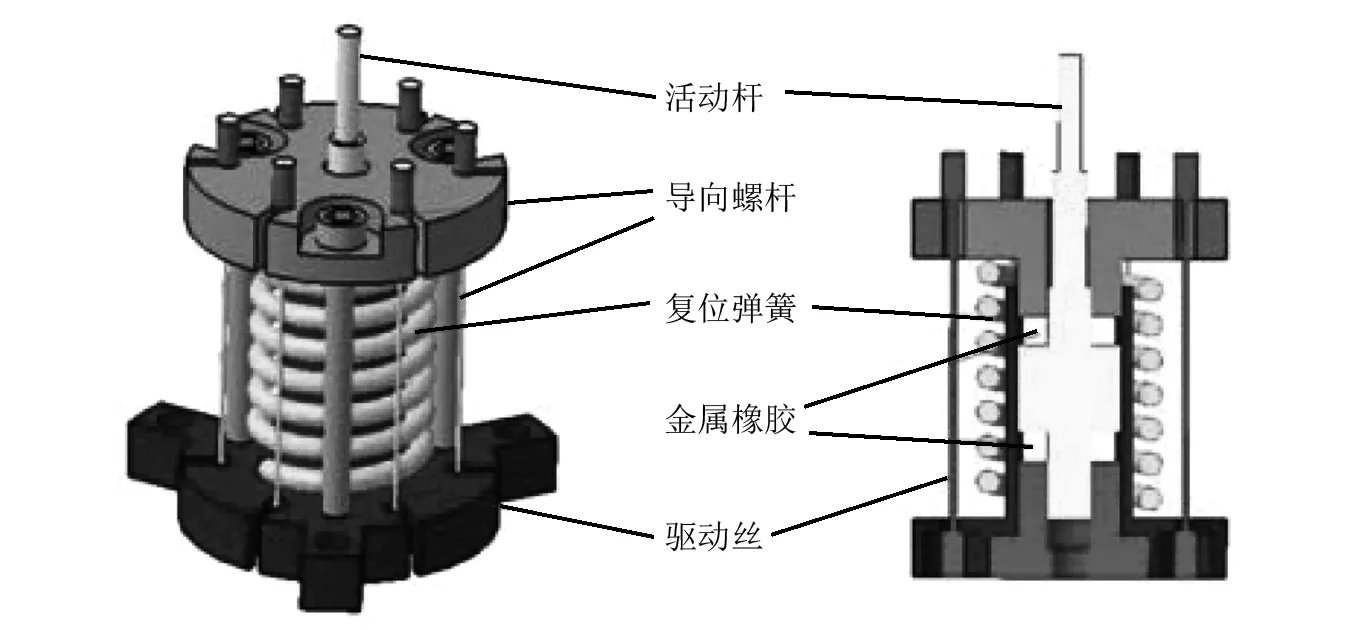
图2 可变频隔振器结构设计Fig.2 Design of frequency tunable vibration isolator
1.2 隔振器设计原理
形状记忆合金(Shape Memory Alloys)是智能结构中最先应用的一种驱动元件。它的特点是具有形状记忆效应(Shape Memory Effect),即将这种材料在高温下定形,并冷却到低温(或室温),施加变形后,使其存在残余变形。如果从变形温度开始加热到一定温度,就可以使原先存在的残余变形消失。随后再进行冷却或加热,形状将保持不变,上述过程可以周而复始,仿佛合金记住了高温下所赋予的形状,将该过程称为单程形状记忆效应[7]。
在外加应力作用下,超弹性材料也会形成弹性马氏体,并且弹性马氏体的含量是应力的函数,从而产生记忆效应,这叫做超弹性或拟弹性记忆效应。一般金属材料、超弹性材料和形状记忆合金的应力应变曲线,如图3所示。

图3 超弹性记忆与形状记忆现象Fig.3 Superelasticity and shape memory effect
基于热力学和连续介质力学,很多学者提出了SMA的各种本构关系模型。本文介绍一种适用于形状记忆合金丝的一维本构关系模型,Tanaka模型[8]是基于热力学基本定律和约束得到的简单一维应力状态下的本构方程,从相变将使自由能降低的观点出发,用热力学原理可以建立经受热弹性马氏体相变及逆相变材料本构关系,其导数形式如下

(1)
式中:σ为应力;E为弹性模量;ε为应变;Ω为相变系数;θ为热弹性系数;ξ为马氏体体积百分数;T为温度。
从Tanaka模型中可以看出,形状记忆合金中存在着较强的热力耦合关系,材料所受应力、温度、相变程度等因素互相制约。在形状记忆合金作为驱动器使用时,可以看作材料受约束状态下的相变,可以很好地利用Tanaka模型理解材料的热力学行为。
利用单程形状记忆效应制成的驱动器具有驱动力大、变形量大等特点,在本文设计的可变频隔振器中,可以发挥其作为驱动器的特点,取得良好的变频效果。综合考虑多方面因素,本文研究中选用NiTi (Ni 49.4 wt%, Ti 50.6 wt%)形状记忆合金丝作为驱动器,每根驱动丝长度为60 mm,驱动丝直径为1 mm。
为研究形状记忆合金的力学特性,设计了形状记忆合金丝专用夹具,并在万能试验拉伸机上测试获得了室温下形状记忆合金的应力应变曲线,如图4所示。

图4 形状记忆合金应力应变曲线Fig.4 Stress-strain curve of shape memory alloy
图4中出现的应力平台即为形状记忆合金材料孪晶马氏体的去孪晶过程,室温下该应力平台的的应力约为268 Mpa,在应力平台产生过程中,应力几乎不变,应变增加。在应力卸载以后,材料的弹性变形恢复,图4中可以看出仍有较大的残余变形,该变形量由应力导致的相变产生,此时若对材料进行加热,会发生由非孪晶马氏体到奥氏体的转变,残余变形恢复,产生驱动力,材料冷却后恢复到初始的孪晶马氏体状态,此即形状记忆合金材料的单程记忆效应。
复位弹簧的作用在于当形状记忆合金丝冷却后,能提供恢复力,将形状记忆合金拉伸后恢复到原来的位置,这样可以实现隔振器的反复变频。即当通电加热时形状记忆合金的驱动力应大于弹簧的弹力,对金属橡胶进行压缩,当形状记忆合金冷却后,弹簧的弹力应大于形状记忆合金相变所需用的力,隔振器在弹簧力的作用下可以恢复到初始状态。根据以上设计需求,复位弹簧的力和形状记忆合金的驱动力之间应满足的关系如式(2)所示
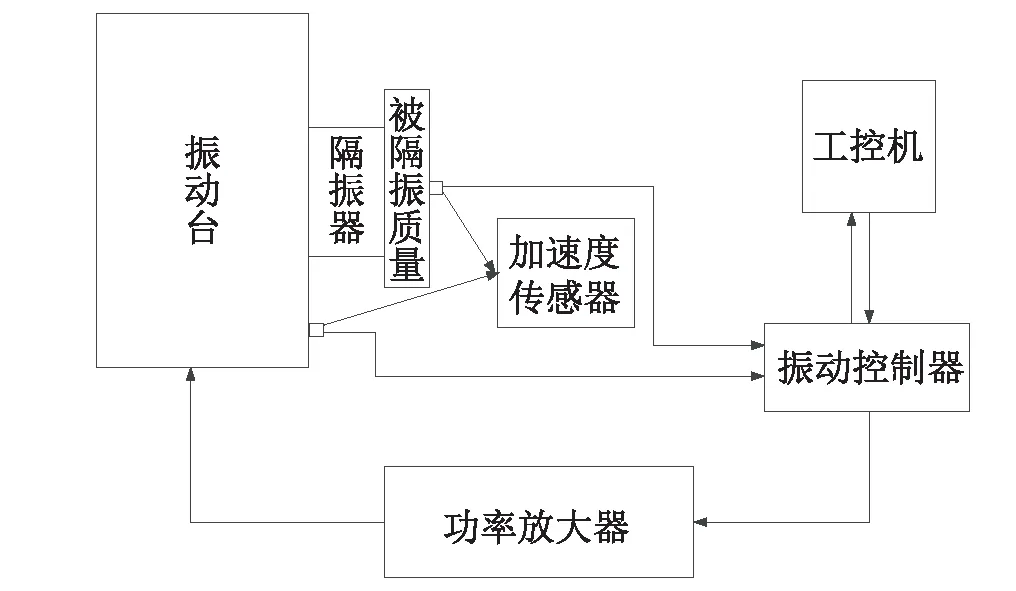
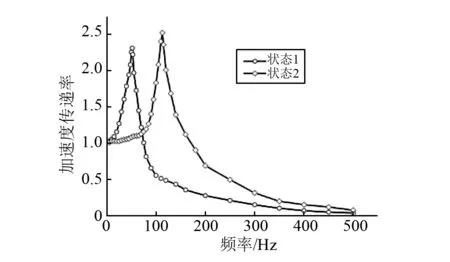
FY (2) 式中:Fa为加热后形状记忆合金的驱动力;FY为形状记忆合金室温下相变所需用的力,式(2)进一步可以表示为式(3)中的形式 n*σY*S (3) 式中:K为复位弹簧刚度;d为弹簧的压缩位移;σa为形状记忆合金加热驱动时的应力;σY为形状记忆合金室温下相变所需要的应力;S为形状记忆合金丝的横截面积,n为形状记忆合金驱动丝数量。由图4中的试验结果可知,σY为268 MPa,σa由形状记忆合金丝生产厂家提供的经验参数确定,约为420 MPa,6根形状记忆合金丝直径为1 mm,选用弹簧刚度为36 N/mm,根据式(2)计算分析后得出,复位弹簧预压缩位移设置为44 mm较为合适。 2.1 金属橡胶制备 金属橡胶材料有多种制备方法,目前尚无统一的制备规范。目前主流的金属橡胶毛胚材料的制备方式主要有两种,一种是将金属丝织成网后,经过特殊处理,使其成为具有螺旋卷特性的金属丝网,另一种是通过制作螺旋卷后,经过拉伸、铺设,形成金属橡胶毛胚材料[9],本文采用的是后一种方式,即首先将金属丝制作成螺旋卷。根据以往经验,将螺旋卷拉伸至螺距与螺旋卷直径相近时,金属橡胶材料内部嵌合达到最好,金属橡胶的稳定性较好。将拉伸后的螺旋卷铺设好,然后在特定尺寸的模具中压缩至特定形状和尺寸即制成了金属橡胶材料。本文中制作金属橡胶采用的材料为0Cr18Ni9,材料密度为7.93 g/cm3,金属橡胶的外形尺寸参数如表1所示。 表1 金属橡胶尺寸参数Tab.1 Size of metal rubber 在前文所述的具体制备工艺和外形参数的基础上,按丝径统一、改变其相对密度和相对密度统一、改变丝径的两种不同思路制作出两组金属橡胶进行对比实验,研究两种参数对金属橡胶的影响,为可变频隔振器挑选合适的金属橡胶阻尼垫,以期达到较好的变频效果。相同丝径不同相对密度的金属橡胶材料的具体参数如表2所示,相同相对密度不同丝径的金属橡胶材料的具体参数如表3所示。 表2 相同丝径不同相对密度的金属橡胶参数Tab.2 Different density ratio metal rubber 表3 相同相对密度不同丝径的金属橡胶参数Tab.3 Different wire diameters metal rubber 根据前文所述的工艺和参数分别制备了两组金属丝网橡胶材料,如图5所示,D1,D2,D3为相同丝径的金属橡胶材料;C1,D1,E1为相同相对密度的金属橡胶材料。 图5 金属橡胶材料实物Fig.5 Metal rubber 2.2 隔振器性能测试 在前文的可变频隔振器的设计与金属橡胶的制作基础之上,设计实验方案比较不同金属橡胶在结构中的共振频率,依据实验结果选择较为合适的金属橡胶作为隔振材料,并进一步对可变频隔振器的效果进行实验验证。在振动测试实验中,扫频实验经常被用来确定非线性结构的共振频率,本文采用正弦扫频试验方案来确定不同参数金属橡胶结构的共振频率。 在正弦扫频实验中,通常用加速度传递率作为隔振器的传递特性表征。加速度传递率即为实验中测得的输出加速度值与输入的加速度值的比值[10],表达式如式(4)所示 (4) 式中:aout为输出加速度;ain为输入加速度值。 正弦扫频实验系统如图6中所示,利用振动台充当振动激励源,两个加速度传感器分别采集输入加速度信号和输出加速度信号。被隔振质量块用以模拟在实际使用中的被隔振物体。 图6 振动实验系统Fig.6 Vibration experiment system 本文采用苏式试验仪器有限公司生产的振动台,振动台的使用频率范围为5~5 000 Hz,最大载荷为100 kg。最大加速度为10g,实验平台搭建如图7中所示,扫频试验设定的扫频频率范围为5~500 Hz,加速度统一设定为4g,被隔振质量块的质量为1 kg。其中加速度传感器1采集的加速度即为aout,加速度传感器2采集的数据即为ain。 图7 振动实验平台Fig.7 Vibration experiment platform 通过正弦扫频实验,获得不同参数的金属橡胶材料作为隔振元件时隔振器的加速度传递率曲线,并依此确定采用不同参数金属橡胶下的结构共振频率,为后续选择合适的金属橡胶材料提供依据,正弦扫频实验结果如图8所示。 从隔振器的正弦扫频实验结果可以看出,相同丝径的金属橡胶材料相对密度越大,结构的共振频率越高;相同相对密度的金属橡胶丝径越大,结构的共振频率越高。由于金属橡胶阻尼材料具有较强的非线性特性,较难通过理论方法预测金属橡胶的隔振性能,可通过非线性结构动力学理论,对此作进一步研究。综合考虑设计指标要求和隔振器的实际变频效果,选取丝径为0.15 mm,相对密度为0.2的金属橡胶作为可变频隔振器的隔振材料,并进一步通过正弦扫频实验,验证可变频隔振器的变频效果,实验结果如图9所示,其中状态1为变频前,状态2为变频后,可以看出在驱动丝通以直流电加热后,隔振器和被隔振质量块的共振频率从52 Hz变化到113 Hz,有着明显的变频效果,满足设计要求。 (a) 不同相对密度金属橡胶加速度传递率曲线 (b)不同丝径金属橡胶加速度传递率曲线图8 不同参数金属橡胶加速度传递率曲线Fig.8 Transmissibility of different metal rubbers 图9 隔振器变频前后加速度传递率曲线Fig.9 Transmissibility of isolator with frequency tuning 本文利用形状记忆合金作为驱动器,结合金属橡胶材料的刚度对变形量敏感的特点设计的半主动隔振器,具有结构紧凑,驱动条件简单等优点。设计了正弦扫频试验,通过实验验证了隔振器固有频率的改变效果。可变频隔振器能够有效抑制高频冲击振动的影响,同时能够减轻对低频振动的放大,在航天器等结构上有着广泛的应用前景。可以进一步通过研究不同材料、不同参数的金属橡胶和形状记忆合金在可变频隔振器中实际使用的效果,优化设计方案,进一步提高隔振器的振动抑制效果。 [1] 刘天雄, 林益明, 王明宇,等. 航天器振动控制技术进展[J]. 宇航学报, 2008, 29(1): 1-12. LIU Tianxiong, LIN Yiming, WANG Mingyu, et al. Review of the spacecraft vibration control technology[J]. Journal of Astronautics, 2008, 29(1): 1-12. [2] 涂凡凡. 人工神经网络在压电主动减振系统中的应用研究[D]. 南京:南京航空航天大学, 2013. [3] BADEL A, SEBALD G, GUYOMAR D, et al. Piezoelectric vibration control by synchronized switching on adaptive voltage sources: Towards wideband semi-active damping[J]. Journal of the Acoustical Society of America, 2006, 119(5): 2815- 2825. [4] 季宏丽, 裘进浩, 赵永春,等. 基于压电元件的半主动振动控制的研究[J]. 振动工程学报, 2008, 21(6): 614- 619. JI Hongli , QIU Jinhao , ZHAO Yongchun, et al. Semi-active vibration control using piezoelectric elements[J]. Journal of Vibration Engineering, 2008, 21(6): 614-619. [5] 梅胜敏, 秦太验, 陶宝祺. SMA用于振动主动控制的方法初探[J]. 力学与实践, 1995, 17(4): 16-19. MEI Shengmin, QIN Taiyan, TAO Baoqi. SMA used in active vibration control[J]. Mechanics in Engineering, 1995, 17(4): 16-19. [6] LIANG C, ROGERS C A. Design of shape memory alloy springs with applications in vibration control[J]. ASME Journal of Vibration and Acoustics, 1993, 115(1): 129- 135. [7] 陶宝祺. 智能材料结构[M]. 北京: 国际工业出版社, 1997. [8] TANAKA K. A phenomenological description on thermome-chanical behavior of shape memory alloys [J]. Journal of Pressure Vessel Technology, 1990, 112: 158-163. [9] 王瑞瑞. 金属丝网橡胶阻尼材料的静动态力学特性试验研究[D]. 哈尔滨:哈尔滨工程大学, 2012. [10] 张步云, 陈怀海, 贺旭东. 多输入多输出正弦扫频试验控制新方法[J]. 振动与冲击, 2015,34(8): 198-202. ZHANG Buyun, CHEN Huaihai, HE Xudong. New control method for MINO swept-sine test[J]. Journal of Vibration and Shock, 2015,34(8): 198-202. AdesignandexperimentalresearchofafrequencytunablevibrationisolatorbasedonSMA WANG Jinqiang, SHEN Xing, LI Jiefeng (State Key Laboratory of Mechanics and Control of Mechanical Structures, Nanjing University of Aeronautics and Astronautics, Nanjing 210016,China) Launching vehicles undergo complex dynamic environment, and an ordinary vibration isolator cannot afford carrying the suppression of high-frequency vibration and avoid low-frequency vibration amplification. Using shape memory alloy (SMA) as a drive and metal rubber as damping elements, a novel design of vibration isolator was proposed. After experimental study on different parameters of the metal rubber, suitable metal rubbers were selected as the frequency tunable vibration isolator components. The experimental result shows that natural frequency of the frequency tunable vibration isolator can change from 60 Hz to 110 Hz, which meets the design requirements. vibration isolator; shape memory alloy(SMA); metal rubber; frequency tunable; semi-active damping 江苏省普通高校研究生科研创新计划项目 (SJLX15_0104);中央高校基本科研业务费专项资金资助 2016-06-13 修改稿收到日期: 2016-07-29 王进强 男,硕士生,1992年生 沈星 男,博士,教授,1976年生 TB122 A 10.13465/j.cnki.jvs.2017.20.0102 实验研究






3 结果与讨论


4 结 论
