互联网分布式混合动力汽车实车在环仿真平台∗
2017-09-15杨亚联孟庆光
张 毅,杨亚联,陆 帅,孟庆光
互联网分布式混合动力汽车实车在环仿真平台∗
张 毅1,2,3,杨亚联1,2,陆 帅2,3,孟庆光4
(1.重庆大学汽车工程学院,重庆400044;2.重庆大学重庆自主品牌汽车协同创新中心,重庆400044;3.重庆大学电气工程学院,重庆400044;4.重庆力帆乘用车有限公司汽车研究院,重庆401122)
在原有混合动力汽车(HEV)硬件在环(HIL)仿真的基础上,使用互联网和车联网(IOV)并以数据耦合的形式,将作为中央控制节点的云端服务器(Cloud),作为实车在环(VIL)的纯电动汽车(EV),以及作为模拟HEV子系统的发动机硬件在环实验台架(EIL)和电池硬件在环实验台架(BIL)整合在一起,构成一个具有实车在环的分布式HEV仿真平台(ID-VIL)。这种改进后的仿真平台使原本没有混合动力系统的EV能实时模拟HEV动力系统的输出,而HEV子系统(如发动机和电池)如同工作在HEV实车上一样。最后通过一段里程约为7km的实车市区道路实验和对实验结果的透明度分析验证了ID-VIL系统的可行性和可靠性。
混合动力汽车;分布式;实车在环仿真;硬件在环仿真
前言
目前汽车建模与仿真工具可以分为3类[1]:纯软件仿真[2]、硬件在环仿真(hardware-in-the-loop, HIL)[3]和纯硬件实验[4]。软件仿真费用相对低廉,并且可以灵活配置反正对象的拓扑结构,但是仿真的准确性受到数学模型的准确性以及建模精细程度的限制,故其主要用在设计过程起始阶段,例如整车匹配。而与之相对的是纯硬件实验,其以高成本和丧失拓扑配置的可编辑性为代价,得到了仿真结果的高精确性。HIL将硬件实验与软件仿真整合在一起得到一个既能对拓扑进行灵活配置,又能准确模拟仿真对象的实验平台[5]。
但是经典的HIL平台通常就近集中布置各个硬件平台与软件平台[6]。而HEV系统因为自身多能量源,往往难以集中布置。例如,重庆大学拥有电机和电池的HIL平台,但是没有发动机的。而力帆乘用车公司正好与之相反。通常的做法是对原有的HIL平台进行改造。例如,在原有发动机HIL上通过转矩耦合器并入一个电机,以实现对于HEV系统的模拟[7],但是这样做费时费钱。受文献[8]和文献[9]中研究的启发,本文中通过互联网实现各HIL平台的分布式配置,构成以云端服务器(Cloud)为服务器(负责整个系统中央控制以及部分HEV子系统的软件仿真),而各HIL为客户端(负责部分HEV子系统的HIL仿真)的互联网分布式硬件在环(internet distributed-HIL,ID-HIL)仿真平台。
比文献[8]和文献[9]中更进一步的是,本文中利用分布式HIL配置灵活的特点,使用车联网(IOV)将一辆改装过的纯电动汽车(EV)接入分布式HIL仿真系统中,构成实车在环仿真(vehicle-inthe-loop,VIL)。此EV既可以作为驾驶员输入平台,又能够将硬件在环的HEV系统的实际输出功率实时地反映到EV的动力输出上。于是既避免了重复使用固定的几组循环工况(如NEDC)[6],又比虚拟驾驶台更准确更直观地反映整车动力性能[3]。
本文分为3部分:首先从系统的整体设计入手,介绍了互联网分布式实车在环仿真平台(ID-VIL)的设计思路和网络拓扑,并分析了对于网络延迟的处理方式;然后逐一介绍了ID-VIL系统中各个子系统的建模方式与特点;最后以实车在环的方式对IDVIL系统进行了实验测试,并对实验结果进行了分析说明。
1 ID-VIL系统整体设计
1.1 物理耦合与数据耦合
如图1所示,本文中仿真的对象为并联式混合动力汽车,其拓扑结构与系统建模可以参见文献[10]和文献[11]。在构建分布式HIL拓扑时,需要在原有系统上选择若干“耦合点”,断开其对应的物理耦合关系,改用基于数据通信的数据耦合关系替代。这些改动会在系统中引入网络传输延迟,进而造成分布式仿真系统与真实系统在动态特性方面出现差异与失真。通常使用系统“透明度”(transparency)[12-13]这一概念来度量分布式系统对于真实系统的拟真程度。而根据文献[14]中的研究,耦合点位置的选择会影响整个系统的透明度。故本文中在选择耦合点时遵循如下原则:(1)在不损害系统透明度的前提下,尽可能多地对无法精确建模的子系统(如电池、发动机和整车驱动)使用HIL替代纯软件仿真;(2)避免对具有高速动态响应特性的系统进行分布式HIL配置,如HEV中电动机的动态响应较电池快且建模相对容易,故其在Cloud中对电动机采用软件仿真实现。
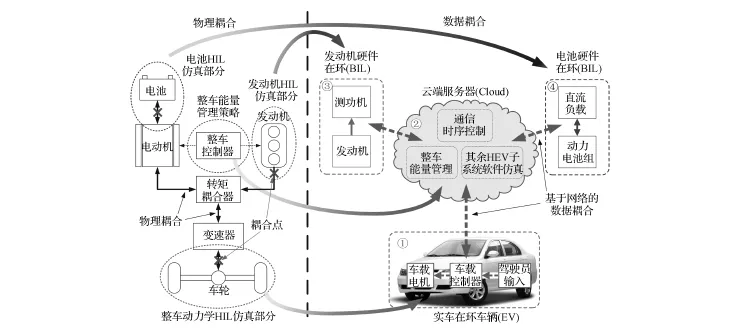
图1 物理耦合结构与数据耦合结构
另外,本文中通过车联网将一辆EV接入分布式系统构成具有实车在环的仿真系统,即ID-VIL。而这使得该系统数据链的流向发生了变化:虽然整个系统的网络拓扑仍为服务器(Cloud)-客户端(包括EIL,BIL和EV)模式,但是数据流向的逻辑起始端为EV上的驾驶员输入(见图2)。具体而言,首先驾驶员输入会送入Cloud,然后Cloud根据HEV整车模型算得对各个HIL(即发动机和电池)所需的功率输出并将需求发送给各个HIL,接着各个HIL根据Cloud的需求调整自身输出并将本地传感器实际测量到的输出回传给Cloud,Cloud根据HEV整车模型整合各个HIL反馈的实际输出得到整车实际可用的驱动转矩并将其发送给EV,最后EV将Cloud回传的整车驱动转矩作为车载电机驱动转矩的给定值。

图2 ID-VIL数据逻辑流向
这样设计有几个显著优点:(1)上路测试的EV虽然没有安装混合动力系统,但是通过与Cloud的数据耦合使得其动力特性与安装了混合动力系统的HEV一致;(2)分布式仿真系统中的各HIL(本文中即指发动机和电池)虽然没有安装在上路测试的车辆上,但是仿真过程中各HIL的工况与安装在车上相比别无二致;(3)实车工况比经典循环工况(如NEDC和UDDS)更能反映真实情况(如天气和交通拥堵),便于今后对整车能量管理策略的优化;(4)相较仿真驾驶台[3],实车在环可以反映给驾驶员更直观的整车动力性能(如加减速性能和转弯性能),方便整车匹配。
1.2 ID-VIL拓扑设计
如图3所示,ID-VIL包括4个主要节点:①纯电动汽车EV(位于重庆大学虎溪校区);②云端服务器Cloud(位于重庆电信IDC机房);③发动机硬件在环EIL(位于力帆乘用车公司);④电池硬件在环BIL(位于重庆大学A区)。其中作为服务器的Cloud既充当各节点之间的通信中枢,又负责运算仿真对象(即HEV)中需要进行软件模拟的子系统(即图3中的电机与传动系统)。另外,因为实车测试的特殊性,所以EV与Cloud之间使用的是基于车联网的无线连接。而其余节点(EIL和BIL)与Cloud之间就直接使用简单可靠的基于互联网的有线连接。
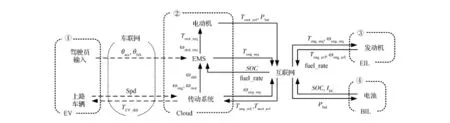
图3 ID-VIL网络拓扑
ID-VIL系统的仿真对象(即并联混合动力汽车)各子系统配置情况如表1所示。
1.3 网络延迟分析与处理
文献[9]中的ID-HIL出于降低传输延迟的考虑而选择了UDP协议。这对于只使用有线连接且丢包率低的应用背景来说是合适的。但是本文中由于引入了实车在环,故必须使用丢包率相对较高的无线连接(因为本地尚未建成统一的车联网,所以参考文献[15]中的设计,实验中使用4G LTE网络作为车联网)。此外,正是因为存在实车在环,故ID-VIL系统为了保证行车安全,对于丢包现象更为敏感。所以有必要对于TCP和UDP进行数据传输试验对比,以确定最合适的方案。
因为ID-VIL实验时长一般在0.5h以内,故传输延迟实验时长设为1 200s,而单次数据包大小为1 024B。由实验结果(图4)可知,在传输延迟方面,TCP相较UDP增加并不明显(使用无线连接时差距进一步缩小),但是UDP在无线连接的应用中存在明显丢包现象。故本文中在实车在环实验中选用了可靠性更高的TCP协议,并且在之后的实验中也发现使用TCP协议后基本没有出现丢包或者传输超时的情况。所以出于简化系统的考虑,也就没有在应用层设置更多的传输校验模块。
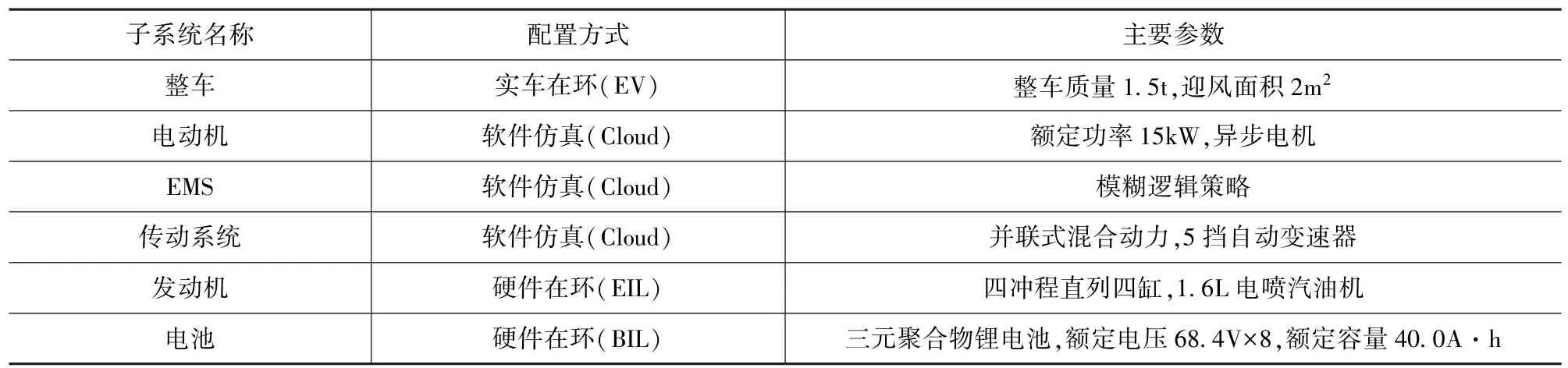
表1 并联混合动力汽车配置情况

图4 TCP与UDP传输延迟对比
2 ID-VIL各子系统设计
2.1 上路测试车辆(EV)
本文中搭建实车在环平台时选用了一辆纯电动汽车(力帆620EV,配置参数见表2)进行改装。这是因为相比传统燃油车,EV更容易改装以接入分布式仿真系统。改装前,620EV的车载控制器通过AD传感器采集驾驶员输入(节气门和制动踏板),然后据此控制电动机输出转矩。改装时,只需将车载控制器采集到的驾驶员输入通过车联网(4G LTE网络,见图5)先发送给云端服务器,然后根据云端返回的给定转矩控制电动机的输出转矩。此外,EV的电动机相较内燃机能更精确地控制输出转矩且动态响应更快,所以EV作为上路测试车辆能够更准确地模拟仿真对象(即HEV)的动态性能。需要指出的是,处于安全方面的考虑,驾驶员的制动踏板输入只有回收制动部分的需求转矩会传给云端,而非回收制动的部分转矩作为“本地变量”并不进入分布式系统。其直接由制动踏板控制制动片提供。这样可以保证在通信网络完全失效时,EV仍然能够提供足够的制动力。

表2 上路测试车辆(EV)配置参数
2.2 云端服务器(Cloud)
云端服务器租用重庆电信的虚拟云主机(CPU 4核Xeon 2.13GHz,内存8GB,带宽5Mb),主要负责3个功能:通信管理、整车能量管理策略和子系统仿真模拟(电动机和传动系统)。

图5 上路测试车辆(EV)配置
通信管理使用的是基于事件触发的通信结构[9,15]。即Cloud以20Hz的频率向各客户端发送需求命令(对EV即整车驱动转矩,对EIL即发动机需求转矩转速,对BIL即电池需求功率),客户端在收到需求命令后会反馈本地传感器采样结果(对EV即驾驶员输入和车速,对EIL即输出转矩转速和瞬时油耗,对BIL即输出电流和SOC)。这与前面提到的数据的逻辑流动方向有所不同,但是并不矛盾。另外,受系统中数据传输频率最慢的子系统(即EIL)限制,数据收发频率选为20Hz。
本文中采用的整车能量管理策略为模糊逻辑策略,基本思路:①电池SOC必须维持在一个合理范围之内,以免损害电池寿命;②在不违反条件①时,满足驾驶员对车辆动力性能的要求;③在不违反条件①和②时,对整车燃油经济性和尾气排放进行实时最优化。具体设置可以参见文献[16]。
在HEV子系统中之所以选择对电池进行硬件在环仿真而电动机进行软件仿真是因为:①相较具有明显非线性的电池,电动机的建模更成熟也更准确;②根据文献[14]中的研究,“耦合点”选在动态特性较慢的系统处(如电池)比选在动态特性较快的系统处(如电动机)更有利于提高整个分布式HIL系统的透明度。所以,本文中HEV电动机系统使用的是本团队以前设计的电动机软件仿真模型:

式中:us为定子电压矢量;is和ir分别为定转子电流矢量;ψs和ψr分别为定转子磁链矢量;ωr为转子角速度;Rs和Rr分别为定转子电阻;Ls,Lr和Lm分别为定转子电感和励磁电感;P为极对数;ψrq和ψrd分别为转子磁链的交直轴分量;isq和isd分别为定子电流的交直轴分量。
HEV中传动系统的软件仿真建模也使用了本团队之前对HEV的研究[18]:

式中:ω为驱动轴转速;Trequest为需求转矩;Tengine为HEV发动机转矩;Tmotor为HEV电动机转矩;igb和imot-eng分别为变速器和减速器的减速比。另外,变速器换挡策略参考文献[9]中设计的变速器模型,使用Advisor的默认换挡策略,即通过查找基于转矩-转速vs挡位的二维表以得到的换挡逻辑。
2.3 发动机硬件在环实验台架(EIL)
如图6所示,本文中发动机硬件在环选用的是AVL 160kW测功机和力帆乘用车公司的LF481Q3发动机(四冲程,直列四缸,排量1.6L,水冷,双顶置凸轮轴,多点喷射电控汽油机)。发动机属于动态特性较高的子系统,在此设置“耦合点”会降低系统的透明度。但是考虑到发动机建模困难且不准确,故此时应当舍弃部分透明度以换取仿真结果的准确性。

图6 发动机硬件在环实验台架
发动机HIL系统从Cloud接收需求转矩转速指令并执行,同时向Cloud返回发动机当前状态(实际输出转矩转速和瞬时油耗)。而在发动机本地控制方面,AVL发动机台架控制模式有转矩-转速模式和节气门开度-转速模式。考虑到转矩-转速模式响应速度较慢(大于50ms),故选用了节气门开度-转速模式。而后者需要将Cloud发送的需求转矩转换为对应的节气门开度。本文中通过查找力帆乘用车公司在标定发动机时建立的转矩转速与节气门开度关系的二维表(图7)将转矩指令转换为节气门开度。但是相对于转矩-转速模式,节气门开度-转速模式的转矩输出会与给定存在一定的静差。
文献[9]中通过计算分布式HIL系统中给定与响应之间的标准差,作为度量系统透明度的定量参照。因为不同发动机台架自身的动态性能存在不小的差异,所以有必要首先确定在排除Cloud以及远程传输影响时发动机台架自身的透明度,并以此作为基准才能更客观地度量分布式HIL系统的透明度。

图7 发动机转矩转速与节气门开度关系图
图8 为纯本地控制(即发动机控制指令由本地控制器直接给定,与云端服务器无关)下的发动机转矩和转速阶跃响应。其中发动机转矩对应标准差为6.76%,转速对应的标准差为4.58%。另外,可以观察到在第10s的转速阶跃时,发动机输出转矩会受到明显扰动,但是反之不然(见第40s的转矩阶跃)。这是由于采用了使用开环控制的节气门开度-转速模式而造成的,还造成转矩响应与给定之间的静差(小于2N·m)。
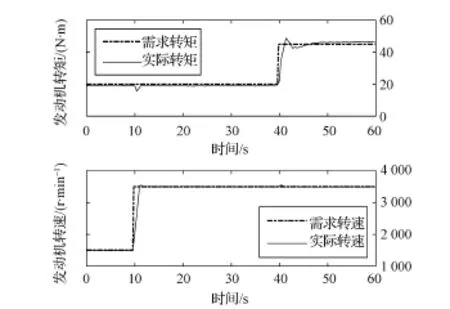
图8 发动机台架转矩与转速阶跃响应
2.4 电池硬件在环实验台架(BIL)
电池不但属于软件仿真建模困难非线性系统,而且在HEV中属于低动态特性的子系统,所以更适合硬件在环仿真。如图9所示,本文中BIL系统采用的动力电池组为山东恒宇生产的三元聚合物锂电池(额定电压68.4V×8,额定容量40.0A·h)。电池检测系统亦由此公司提供,负责检测电池母线电流和端电压,并估算电池SOC。而电池负载则由实验室的Kratzer电池充放电模拟器充当,其控制台负责运行与Cloud进行通信的本地TCP客户端。即Cloud向BIL发送需求功率(放电为正,充电为负),而BIL则向Cloud返回电池母线电流和SOC估计值。
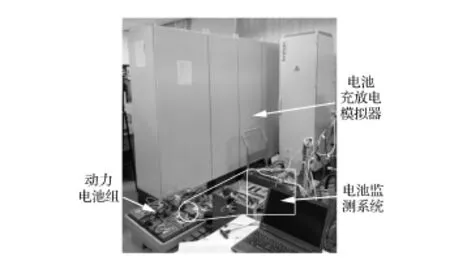
图9 电池硬件在环实验平台
3 ID-VIL实验与分析
3.1 实验设备布置与行驶路线
图10为ID-VIL各子系统的位置分布,具体如1.2节所述。
实验对应的仿真对象即为表1中所示的并联混合动力汽车,而ID-VIL各个子系统的参数与前面第2节中的描述一致。实验中所选的实车行驶路线为绕行重庆大学虎溪校区一周的公路,即以大学城西路东北角为起始点,途径大学城南二路、大学城中路、大学城南路,最后回到起始点(见图10)。全程一共约7km,途经13个红绿灯,行驶时间约20min,属于比较典型的城市路况。

图10 实验设备地理位置与实验车辆行驶路线
3.2 实验结果分析
实验过程中由Cloud收集ID-VIL各子系统状态,如图11所示。因为选择的测试路线为主城区且红绿灯较多,所以可从图11中的车速曲线看到实验车辆车速不高且走走停停,其中车速长时间为零的时段(例如从227s到268s)即为停车等红灯的情况。而停车期间加速踏板位置并不恒为零,这是因为停车等待期间偶尔需要以“蠕动”的方式调整车的位置(大部分情况是前面的车“蠕动”了一下,所以实验车辆也就跟着动)。另外,结合发动机与电动机相关的输出曲线可知,此时HEV处于纯电动模式,即发动机关闭(转矩和转速为零)而电动机负责满足整车动力需求(电动机需求功率大于零)。从765s到800s,实验车辆从静止加速到50km/h,发动机和电动机同时输出正功率,即HEV工作在电动机助力状态。在1 030s到1 165s,实验车辆处于相对的匀速巡航状态。这时由发动机负责提供大部分驱动功率,而电动机则间或地进行主动充电(电动机需求功率小于零),即这时HEV交替工作在主动充电模式和纯发动机模式。
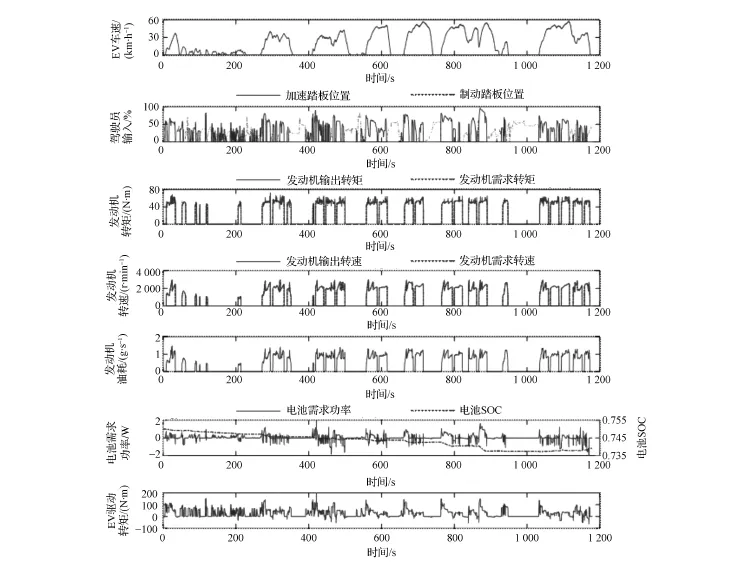
图11 ID-VIL实验结果
ID-VIL实验统计数据见表3。需要指出的是,表中的平均车速是仅考虑行驶状态,即不计入停车状态时得到的平均值。此外,行驶实验前后电池SOC的变化量非常小。这是由于两方面原因造成的:一是HEV的能量管理策略采用了电量平衡策略,所以在行驶过程中会有选择性地进行主动充电;二是HEV的电池容量(40.0A·h,68.4V×8)相较有限的行驶里程(6.7km)大得多,所以整个行驶实验中电池SOC的变化都不明显。
3.3 ID-VIL系统透明度分析
根据文献[9],本文中同样使用给定与响应之间的标准差作为度量系统透明度的定量参照。因为HEV中电动机子系统为软件仿真,其给定与响应几乎完全一致,所以电动机子系统不会对系统透明度产生影响。而剩下的BIL系统既不直接参与与转矩转速相关的计算,又属于动态特性变化较慢(SOC变化相较转矩转速慢得多,可见图11)的系统。根据文献[14]可知,ID-VIL系统的透明度主要由EIL系统决定,故使用与EIL系统相关的发动机转矩转速的给定与响应之间的标准差来度量ID-VIL系统的透明度。而EIL对系统透明度的影响有两个方面:①EIL系统自身的响应速度;②系统运算处理(主要是Cloud)以及传输数据造成延迟。前者在前文通过EIL本地阶跃响应实验已经进行了定量测试,表4中则给出了图11中ID-VIL实验与之前EIL本地阶跃实验的透明度对比。EIL本地阶跃实验反映的是①,而ID-VIL实验反映的则是①和②的叠加。由表4可知,ID-VIL会对仿真系统的透明度造成不利影响,但是结合图11的车速曲线没有出现异常以及驾驶实际感受来看,ID-VIL系统仍然是实时可控的,能够及时准确地响应驾驶员输入。

表3 ID-VIL实验统计数据

表4 实验给定与响应的标准差%
图12则给出了不同时间点上ID-VIL实验的给定与响应之间的相对误差。图中转矩和转速的最大误差都主要发生在发动机起动和停止的时刻,而且此时转矩对应的相对误差(约400%)远高于转速的相对误差(约200%)。这主要是3方面原因:(1)起动和停止时发动机转矩和转速同时需要进行大幅度阶跃,这本身就会大幅增加给定与响应的相对误差;(2)由此前对EIL本地转矩转速阶跃实验的分析可知,转速的阶跃会明显影响转矩,反之却不然,当发动机转矩转速同时出现阶跃,转矩的相对误差就远大于转速的;(3)本文中采用了与文献[9]中类似的理想传动模型,即变速器和离合器的动作是瞬间完成的,不存在中间过程,这在变速器换挡时(尤其是在纯电动模式切换到混动模式的过程中)会加大发动机需求转速的变化速率,而这进一步增大了起停时系统给定与响应的相对误差。从另一方面来看,ID-VIL对透明度的影响其实主要局限在发动机起停的短暂时刻,其余时刻相对误差都稳定在很低的水平(图12)。这说明在大部分时间里ID-VIL系统的透明度都是可以接受的。
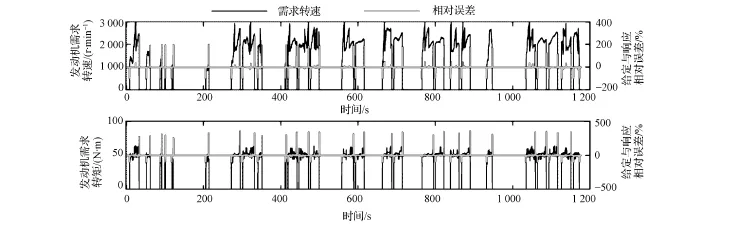
图12 ID-VIL实验中给定与响应的相对误差
4 结论
本文中在互联网分布式硬件在环[8-9]的基础上,通过车联网引入实车在环构成了ID-VIL系统,并利用此系统构建了一个并联混合动力汽车的仿真平台。这样一方面使得在环的EV虽然没有HEV动力系统,但是能够模拟HEV动力系统的输出;另一方面让没有配置在车上的发动机、电池等HIL子系统能够如同工作在一辆HEV上。然后通过对IDVIL系统进行实车上路实验,验证了整个系统的可行性与可靠性,并且对实验结果进行了系统透明度的定量分析。这表明ID-VIL系统能够对仿真对象,即HEV系统,进行具有较高拟真度的实时硬件在环仿真。利用此平台配置灵活的特点,今后可以在其基础上对HEV参数匹配与控制策略优化等方面进行进一步研究。
此外,本文中ID-VIL系统存在的一个问题就是没有充分考虑网络意外断开时的应急处理机制。目前,实验车辆EV中制动为“本地”控制对象,所以能够保证在网络意外断开时制动仍然可控。但是这仅适用于车速比较低的情形,在车速较高的情况下(例如高速公路工况)并不能保证驾驶员与实验车辆的安全。这也是为何实车上路实验中选择低速的市区道路工况,而不是高速的环城高速道路工况的原因。下一步需要设计一种安全机制以保证网络意外断开时,在环实验车辆的控制系统能够自动由云端平滑地切换到车载端。
[1] TARA E,FILIZADEH S,DIRKS E.Battery-in-the-loop simulation of a planetary-gear-based hybrid electric vehicle[J].IEEE Transactions on Vehicular Technology,2013,62(2):573-581.
[2] 杨亚联,叶盼,胡晓松,等.基于DP优化的ISG型速度耦合混合动力汽车模糊控制策略的研究[J].汽车工程,2016,38 (6):675-679.
[3] HE H,XIONG R,ZHAO K,et al.Energy management strategy research on a hybrid power system by hardware-in-loop experiments [J].Applied Energy,2013,112:1311-1317.
[4] LEE H,SUL S.Fuzzy-logic-based torque control strategy for parallel-type hybrid electric vehicle[J].IEEE Transactions on Industrial Electronics,1998,45(4):625-631.
[5] ZHANG H,ZHANG Y,YIN C.Hardware-in-the-loop simulation of robust mode transition control for a series-parallel hybrid electric vehicle[J].IEEE Transactions on Vehicular Technology,2016,65 (3):1059-1069.
[6] KERMANI S,TRIGUI R,DELPRAT S,et al.PHIL implementation of energy management optimization for a parallel HEV on a predefined route[J].IEEE Transactions on Vehicular Technology,2011,60(3):782-792.
[7] TRIGUI R,JEANNERET B,MALAQUIN B,et al.Performance comparison of three storage systems for mild HEVs using PHIL simulation[J].IEEE Transactions on Vehicular Technology,2009,58 (8):3959-3969.
[8] ERSAL T,BRUDNAK M,SALVI A,et al.Development and model-based transparency analysis of an internet-distributed hardware-in-the-loop simulation platform[J].Mechatronics,2011,21: 22-29.
[9] ERSAL T,BRUDNAK M,STEIN J,et al.Statistical transparency analysis in internet-distributed hardware-in-the-loop simulation[J]. IEEE/ASME Transactions on Mechatronics,2012,17(2):228-238.
[10] ZHANG Y,LIU H.Varying-domain optimal management strategy for parallel hybrid electric vehicles[J].IEEE Transactions on Vehicular Technology,2014,63(2):603-616.
[11] ZHANG Y,LIU H.Fuzzy multi-objective control strategy for parallel HEV[J].IET Electrical Systems in Transportation,2012,2 (2):39-50.
[12] LAWRENCE A.Stability and transparency in bilateral teleportation[J].IEEE Transactions on Robotics and Automation,1993,9(5):624-637.
[13] GRIFFITHS G,GILLESPIE B,FREUDENBERG S.A fundamental trade off between performance and sensitivity within haptic rendering[J].IEEE Transactions on Robotics,2008,24(3): 537-548.
[14] ERSAL T,GILLESPIE R.Effect of coupling point selection on distortion in internet-distributed hardware-in-the-loop simulation [J].International Journal of Vehicle Design,2013,61(1-4): 67-85.
[15] OZATAY E,ONORI S,WOLLAEGER J,et al.Cloud-based velocity profile optimization for everyday driving:a dynamic-programming-based solution[J].IEEE Transactions on Intelligent Transportation Systems,2014,15(6):2491-2505.
[16] ZHANG Y,LIU H.Torque control strategy for parallel hybrid electric vehicles using fuzzy logic[J].WSEAS Transaction on Systems,2011,10(4):116-125.
[17] 刘和平,薛鹏飞,彭东林.基于非线性磁链动态模型的无速度传感器矢量控制系统[J].电机与控制学报,2015,19 (12):33-37.
[18] 张毅,刘和平.并联混合动力汽车模糊多目标控制策略[J].重庆大学学报,2013,36(2):77-86.
[19] WIPKE K,CUDDY M,BURCH S.ADVISOR 2.1:a userfriendly advanced powertrain simulation using a combined backward/forward approach[J].IEEE Transactions on Vehicular Technology,1999,48(6):1751-1761.
Internet-distributed Vehicle-in-the-loop Simulation Platform for Hybrid Electric Vehicles
Zhang Yi1,2,3,Yang Yalian1,2,Lu Shuai2,3&Meng Qingguang4
1.Department of Automotive Engineering,Chongqing University,Chongqing 400044;2.Chongqing Automotive Collaborative Innovation Center,Chongqing University,Chongqing 400044;3.Department of Electrical Engineering,Chongqing University,Chongqing 400044;4.Chongqing Lifan Passenger Vehicle Co.,Ltd.Automotive R.I.,Chongqing 401122
On the basis of existing hardware-in-the-loop(HIL)simulation on hybrid electric vehicle (HEV),the cloud server as the central control node,the electric vehicle(EV)as the vehicle-in-the-loop as well as the engine-in-the-loop and battery-in-the-loop test benches as HEV simulation subsystem are integrated by using internet and internet of vehicle with a form of data coupling to compose an internet-distributed vehicle-in-the-loop (ID-VIL)simulation platform.This modified simulation platform enables the EV without powertrain simulate the output of HEV power system and the subsystems of HEV(such as engine and battery)can work just the same as on real HEV.Finally the feasibility and reliability of ID-VIL system is verified by both a 7 kilometers long road testing in urban areas and the transparency analysis on test results.
hybrid electric vehicle;distributed;vehicle-in-the-loop simulation;hardware-in-the-loop simulation
10.19562/j.chinasae.qcgc.2017.08.001
∗国家自然科学基金面上项目(51575064)和中央高校基础研究基金(106112016CDJZR335521)资助。
原稿收到日期为2016年8月8日,修改稿收到日期为2016年10月4日。
张毅,博士,E-mail:zagyi81@cqu.edu.cn。
