多GPS架构下汽车测试数据处理方法∗
2017-09-15夏泽斌徐延海
夏泽斌,徐延海,吴 龙
多GPS架构下汽车测试数据处理方法∗
夏泽斌1,2,徐延海3,吴 龙1,2
(1.三明学院机电工程学院,三明 365004; 2.三明机械CAD工程研究中心,三明 365004;3.西华大学交通与汽车工程学院,成都 610039)
为提高应用GPS技术的汽车测试中的效率和可靠性,本文中研究了一种采用多个GPS的汽车动态参数测量方法。为消除GPS定位误差,提出了一种测试数据修正方法,有效地保证了多GPS之间的相对位置和汽车运行轨迹的精确性。同时利用惯性测量单元同步测量汽车运行中的横摆角速度,并与GPS数据计算得到的横摆角速度进行对比。结果表明,两者很好地吻合,说明所提出的动态数据处理方法计算得到的汽车行驶轨迹和有关动态参数的精度满足汽车性能道路试验要求。
汽车测试;多GPS;数据处理方法;横摆角速度
前言
汽车在行驶过程中的动态参数是汽车主动安全控制、汽车故障诊断和汽车试验的必要因素[1-2]。目前主要利用惯性测量单元(intertial measurement unit,IMU)进行汽车关键动态参数的测量,为弥补IMU存在的随机漂移和误差累计,融入GPS数据通过卡尔曼算法对其进行处理____[3-11]。_但这会使测试成本高昂,且测试过程复杂,因此有必要构建一种简易可行的测试方法。多GPS架构基于单一GPS信号,具有全无误差累积的特点,对汽车的运行轨迹进行精确测量,利用多GPS随着汽车轨迹所采集的数据,通过数据处理与计算得到汽车在运行过程中的各种动态参数。
1 多GPS架构与测试数据特点
1.1 多GPS架构
车厢作为一个刚体,GPS天线布置在车厢顶部,通过测量车厢上3个点的坐标,利用多GPS架构与车厢的几何关系,可以计算得到车厢的姿态角。GPS以一定的数据更新率实时更新数据点,通过前后点的位置关系和时间差,计算得到汽车在运动过程中的动态参数。本文中用3个GPS天线分别布置在车厢上同步采集这3个点的实时坐标,如图1所示。
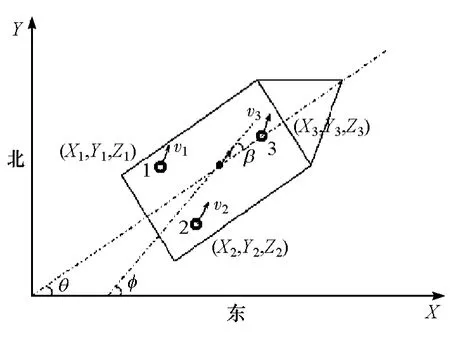
图1 3个GPS天线的布置图
图1 中,给每个GPS天线设置标识码,1,2和3分别为GPS1,GPS2和GPS3。图中XY坐标系为大地坐标系,X轴正向指向大地东向,Y轴正向指向大地北向。(X1,Y1,Z1),(X2,Y2,Z2)和(X3,Y3,Z3)分别为3个GPS的坐标。定义3个GPS前一点的坐标分别为(X1′,Y1′,Z1′),(X2′,Y2′,Z2′)和(X3′,Y3′,Z3′)。3个GPS天线处测得的瞬时速度分别为v1,v2和v3,车厢纵轴线与大地坐标系中X轴间的夹角为汽车行驶过程中的横摆角θ,汽车质心处的速度方向与X轴的夹角为汽车航向角ϕ。其中GPS1与GPS2的连线垂直于汽车纵轴,3个GPS呈边长为1m的正三角形。
1.2 测试数据特点
在GPS实际测量中存在误差,GPS的定位误差为1.8m,测量精度为0.06m[11]。其中,测量精度满足汽车测试要求,可不予考虑;但其定位误差会影响所测得的3个GPS的相对位置,因而导致所获得的汽车运行轨迹的误差,必须进行修正。
图2为3个GPS测量得到的原始轨迹图,图中的三角形代表各时刻3个GPS的位置,而GPS1,GPS2和GPS3箭头所指分别为3个GPS的轨迹。按照原来的布置,每个三角形本应为边长为1m的等边三角形,即正三角形。但因GPS的定位误差,引起三角形3个顶点相互位置的改变,使之不再是正三角形而需要修正。鉴于GPS定位误差对所测得汽车行驶轨迹的影响机理比较复杂,为使修正方案可行,做出如下简化:一是假定GPS定位误差不影响所测GPS1点的位置和PGS1与PGS2连线的方向;二是假定GPS定位误差对各三角形的影响相同。据此,测量数据修正原则为:每个三角形的点1 (GPS1)不动,底边,即点1(GPS1)和点2(GPS2)的连线方向不变的条件下,调整点2和点3的位置,使之恢复为正三角形。
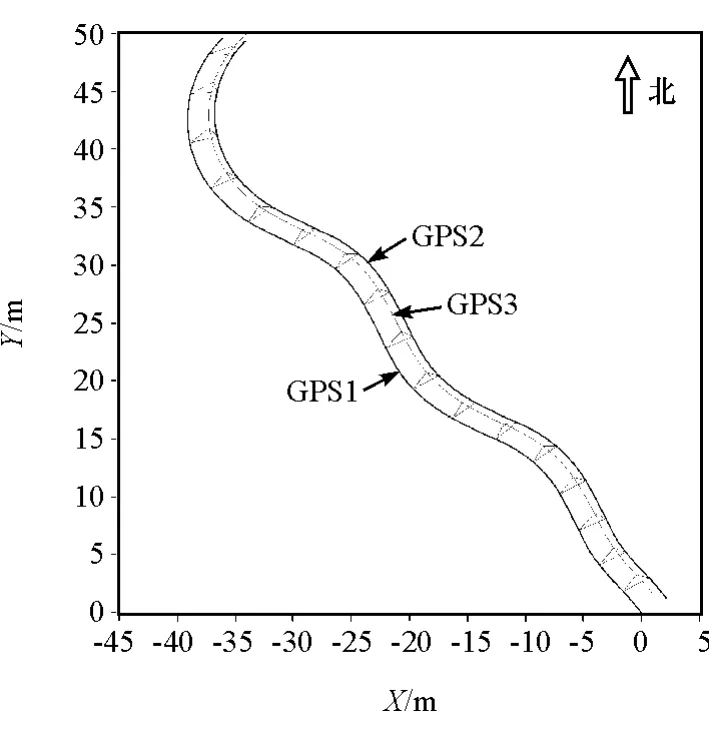
图2 3个GPS测量原始轨迹图
2 多GPS架构下的数据修正方法
2.1 轨迹矫正算法
根据上述修正原则,具体修正步骤如图3所示。
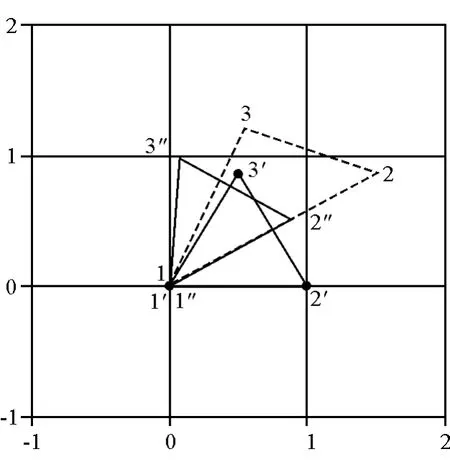
图3 三角形修正
首先修正初始时刻的第1个三角形,其初始测得位置由图中Δ123表示,其点1在坐标系原点上。第1步:以点1为基准,做一个底边在X轴上、边长为1的正三角形,即图中的Δ1′2′3′。显然,若设(X1p,Y1p),(X2p,Y2p)和(X3p,Y3p)分别为点1′,2′和3′处的坐标,则有

第2步:为使底边的方向不变,须将Δ1′2′3′绕点1′逆时针转回底边与X轴的夹角θ。根据坐标变换可得

式中:(Xz,Yz)为旋转后三角形各点的坐标值;θ为旋转角度。至此,第1个三角形修正完毕,其各顶点坐标的修正值为
然后,根据第2个假定,将各三角形3个顶点(实际上只有点2和点3须修正)坐标值减去式(3)的修正值即可得到修正后的实际轨迹,如图4所示。
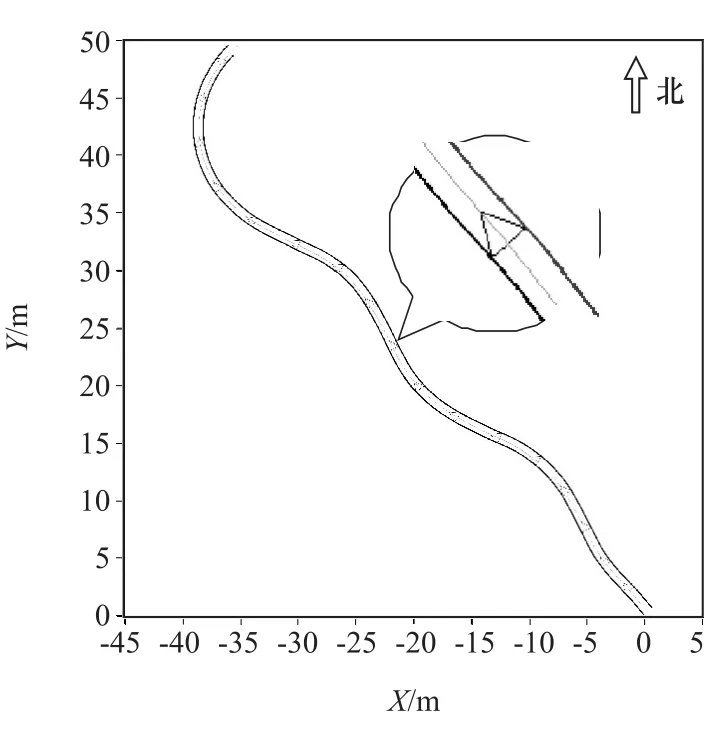
图4 修正后的轨迹图
肉眼对比图2与图4可粗略看到,各三角形已从非正三角形修正为正三角形。根据所做的假定,可以认为修正后的轨迹应能正确反映真实轨迹,但有待下文验证。
2.2 多GPS架构下横摆角速度的计算方法
横摆角速度是指汽车车身绕汽车坐标系垂直向上的Z轴的旋转速度,根据修正后的数据,可按式(4)计算横摆角速度:

式中:γi为第i时刻的横摆角速度;θi为第i时刻的汽车横摆角;Δt为同一GPS测量数据两点之间的时间差;(X1i,Y1i)和(X2i,Y2i)分别为i时刻测得的GPS1和GPS2初始坐标值。
3 实车试验与结果分析
3.1 试验条件
GPS的布置如图5所示。3个GPS天线分别以边长为1m的等边三角形布置在车顶,其中GPS1与GPS2的连线与汽车纵轴线垂直,GPS3处于汽车纵轴线上。IMU固定在车厢上的3个GPS中间位置,安装须注意X轴正方向应指向汽车前进方向。

图5 硬件平台与GPS接收机连接图
图5 中:1-3为GPS天线,接收来自卫星的微波信号转换成电信号再传送给接收机;4-6分别为1-3所对应的GPS接收机,进一步处理来自GPS天线的电信号,最终数据帧的格式输出到端口供上位机使用;7-9为电源;10为上位机,有4个外接串口;11为IMU测量系统,与GPS同步采集数据。
其中GPS测试数据精度为0.06m,数据更新率为20Hz;IMU设备动态精度为1.5°,可重复性偏差小于0.3°/s,数据更新率为100Hz。实车试验场景如图6所示。

图6 实车试验
3.2 结果分析
参照汽车整车道路试验方法国家标准,在平直混凝土或沥青路面上,布置标桩5根,试验汽车以蛇形穿杆通过试验路段[12]。设置GPS基本参数,当GPS信号显示收到4颗卫星以上时开始试验。
图7为轨迹修正前后用3个GPS天线实时坐标值计算得到的汽车横摆角速度与IMU测量得到的横摆角速度值对比。由图可见,轨迹修正前用GPS坐标值算得的汽车横摆角速度与IMU测量值相差悬殊,而修正后两者很好地吻合,最大偏差在5°/s以内,满足汽车测试的要求。这一方面验证了在确定数据修正原则时所做的假定的合理性和所采用的数据修正方法的可行性;另一方面也说明前言中提及IMU存在随机漂移和误差累积的缺陷在短程应用中并不显露而可以接受。

图7 修正前后GPS计算和IMU测量的横摆角速度
4 结论
基于汽车测试技术的需要,采用多GPS架构,对汽车运动轨迹进行测量,通过数据处理对轨迹进行修正,并通过实车试验数据分析了该方法的可靠性与可行性。
利用多GPS测量的汽车横摆角速度与对应的IMU测量数据一致性很好,最大偏差在5°/s以内,满足汽车测试的要求,避免了传统测量方法带来的安装和误差累计等困难,也验证了数据处理方法的可行性。
试验工况具有典型性,分析结果具有一定的参考价值,为今后GPS深入运用于汽车测试领域提供了良好的基础。该数据处理方法是直接对GPS系统提供的位置信息进行相应的处理,适用于我国现已基本建成的北斗卫星系统和其它全球卫星定位系统。
[1] 余卓平,高晓杰.车辆行驶过程中的状态估计问题综述[J].机械工程学报,2009,45(5):20-32.
[2] 黄晨,陈龙.稳态工况下横摆角速度与侧倾角的关系分析[J].农业机械学报,2014,45(2):34-39.
[3] ALMAGBILE A,WANG J,DING W.Evaluating the performances of adaptive Kalman filter methods in GPS/INS integration[J]. Journal of Global Positioning Systems,2010,10(9):33-40.
[4] 王家恩,陈无畏.基于期望横摆角速度的视觉导航智能车辆横向控制[J].机械工程学报,2012,48(4):108-115.
[5] 张金柱.基于GPS的汽车稳定性控制系统研究[D].哈尔滨:哈尔滨工程大学,2012.
[6] LAI Y,JAN S,HSIAO F.Development of a low-cost attitude and heading reference system using a three-axis rotating platform[J]. Sensors,2010(10):2472-2491.
[7] 安长江,李文勇.基于GPS技术的汽车跑偏量测试方法研究[J].汽车工程,2009,31(9):804-806.
[8] 张小龙,冯能莲,宋健,等.基于SIMS/GPS的汽车运动状态组合测量系统[J].农业机械学报,2008,39(10):30-35.
[9] 刘美生,杨春生,罗发贵,等.利用GPS技术进行汽车运动稳定性测试技术研究[J].中国测试技术,2008,34(5):10-15.
[10] 李靖,张向文.汽车EPS预测控制仿真研究[J].计算机仿真,2015,32(11):188-192.
[11] 陈永冰,钟斌.惯性导航原理[M].北京:国防工业出版社,2007:254-265.
[12] 何耀华.汽车试验技术[M].北京:机械工业出版社,2010: 179-193.
Measured Data Processing Scheme in Vehicle Test with Multi-GPS Layout
Xia Zebin1,2,Xu Yanhai3&Wu Long1,2
1.School of Mechanical&Electronic Engineering,Sanming University,Sanming 365004;2.Sanming Engineering Research Center of Mechanical CAD,Sanming 365004;3.School of Transportation and Automobile Engineering,Xihua University,Chengdu 610039
To enhance the efficiency and reliability of vehicle test and measurement applying GPS technology,a vehicle dynamic parameter measurement method using multi-GPS is studied.For eliminating the positioning error of GPS,a measured data correction scheme is proposed,effectively ensuring the accuracy of relative position between multi-GPS and vehicle driving trajectory.Meanwhile,inertial measurement unit is utilized to synchronously measure vehicle yaw rate during driving,which is then compared with that calculated by GPS data.The results show that both results agree well with each other,demonstrating the high accuracy of vehicle driving trajectory and related dynamic parameters obtained by the data processing scheme proposed,meeting the requirements of road test on vehicle performance.
vehicle test;multi-GPS;data processing scheme;yaw rate
10.19562/j.chinasae.qcgc.2017.08.015
∗福建省教育厅科技项目(JK2014047)、福建省教育厅科技项目(JAT160463)和三明学院科技项目(B201612)资助。
原稿收到日期为2015年12月28日,修改稿收到日期为2016年10月20日。
夏泽斌,讲师,E-mail:xzb1833@163.com。
