汽车自适应可调尾翼系统的研发∗
2017-09-15葛如海
丁 鹏,葛如海,李 智,王 莹
汽车自适应可调尾翼系统的研发∗
丁 鹏1,葛如海2,李 智3,王 莹1
(1.无锡职业技术学院,无锡 214121; 2.江苏大学,镇江 212013; 3.江南大学,无锡 214121)
鉴于汽车尾翼的不同攻角影响汽车行驶中的燃油经济性、操纵性和制动性,设计了一种电控可调尾翼的减阻系统(DRS)。系统依据与行驶速度有关的气动阻力和气动升力与尾翼攻角之间的关系,利用模糊控制算法确定DRS系统尾翼最佳攻角的控制信号。创建了系统的数学模型,优化了系统各部分的传递函数,并应用于控制器的硬件结构。利用Matlab对系统的稳定性进行了分析,并在实车上进行了验证试验,结果表明该系统改善了汽车的燃油经济性和制动性。
汽车;可调尾翼;减阻系统;模糊控制;传递函数
前言
汽车在高速行驶时受到的气动阻力和气动升力与速度的平方成正比,汽车速度超过60km/h时空气阻力成为汽车的主要阻力,气动升力会显著减少汽车的附着力,严重影响汽车高速行驶的操纵稳定性、动力性和燃油经济性[1]。在汽车上安装合理的尾翼可有效抑制汽车高速行驶时遇到的气动阻力和气动升力。在国外研究中,文献[2]中利用计算流体力学软件研究了尾翼对方程式赛车气动性能的影响,文献[3]中利用计算流体力学软件研究了尾翼对轿车气动升力和气动噪声的影响。国内的一些学者对尾翼对轿车气动特性的影响也进行了研究,取得了一定的成果[4-8]。为提高汽车的操纵稳定性、制动性和燃油经济性,汽车在不同速度时的气动阻力系数和气动升力系数应尽可能小。目前国内外各种文献均从空气动力学的角度分析尾翼攻角的变化对汽车阻力的影响,但很少设计出自适应智能可调尾翼。据此,本文中设计一种电控可调尾翼系统(drag reduction system,DRS),通过尾翼在汽车不同车速下升起不同的姿态,使汽车随时获得最优的气
∗全国教育“十二五规划课题”项目(EHA140395)和教育部第49批留学归国人员科研启动基金资助。
原稿收到日期为2016年7月4日,修改稿收到日期为2016年9月6日。
1 DRS系统结构和工作原理
本文中设计了一种电控机械可调式尾翼装置,其结构如图1所示。本系统机械装置主要有驱动电机、减速齿轮副、转轴和尾翼。该系统的控制装置主要由模糊控制器、比较器、制动控制器、放大器、滑动电位计和反馈控制器组成。工作原理:首先模糊控制器根据车速和加速度求出各车速对应的最优尾翼攻角,并以电压信号的形式输出,作为基本控制电压;基本电压与反馈控制器输入的电压相比较(相减)取得偏差电压信号,该信号通过放大器调节之后控制电机转角,电机驱动减速齿轮副转动,并带动尾翼转轴旋转,以获得不同车速下尾翼的攻角;转轴同时驱动滑动变阻器,随时监控该轴转角,作为系统的反馈信号;当驾驶员踩下制动踏板时,系统输入制动信号,此时制动信号控制电机转角(偏差电压信号不再起作用)保持在一个固定值,以增加汽车在制动过程中的风阻,提高汽车的制动效能。
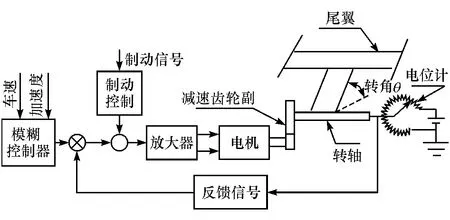
图1 自适应可调控尾翼DRS系统组成框图
2 数学模型与控制策略
2.1 模糊控制器
模糊控制是基于启发性的知识和语言决策规则设计的,有利于模拟人工控制过程和方法,增强控制系统的自适应能力[11]。
模糊控制从控制过程的定性认识出发,对动态特性变化显著的对象非常适用,且有较强的鲁棒性和非线性,因此适用于本系统。该系统控制器的输入量为车速和加速度,输出对象为基本控制电压。在控制器设计中,取车速范围值为[30,210],模糊论域取值[30,210],量化为7个等级,其余为边界值,即得出:[-3,-2,-1,0,1,2,3],模糊子集为{负大,负中,负小,零,正小,正中,正大},车速变化率模糊论域为[-6,6],量化为5个等级,其余为边界值,模糊子集为{负大,负小,零,正小,正大}。基本控制电压模糊论域取值[0,2],量化为5个等级,其余为边界值,模糊子集为{负大,负小,零,正小,正大},根据文献[2]~文献[5]中所述车速与尾翼姿态之间的关系,以车速为主要控制输入参数,加速度为辅助控制输入参数,根据模糊控制规则,利用Matlab/ Simulink仿真输出基本控制电压信号,如图2所示。
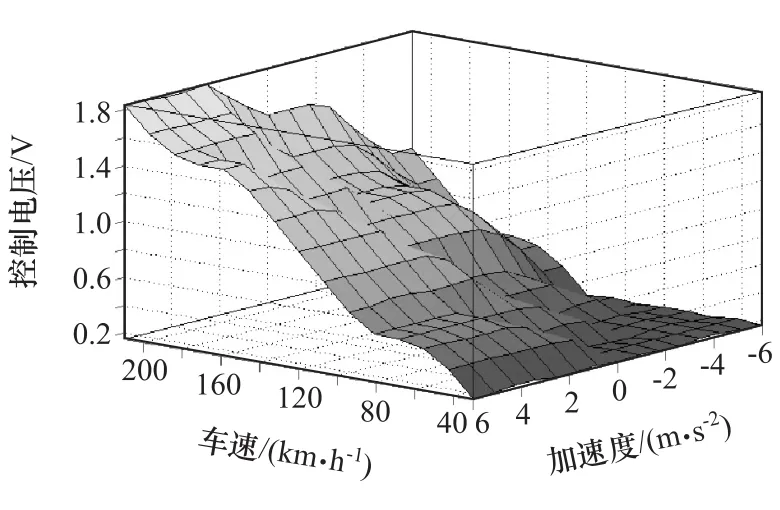
图2 模糊控制器输入输出变量隶属关系图
由图2可见,基本控制电压信号随着车速升高呈非线性增大趋势,控制曲线平滑,说明控制策略正确。
图2中,利用模糊控制规则根据汽车行驶中车速和加速度求出对应的基本控制电压。基本控制电压经放大处理后驱动电机旋转至一定的角度,即各点控制电压都对应着一个尾翼攻角角度。控制电压与尾翼攻角之间的关系如图3所示。

图3 控制电压与尾翼攻角关系图
2.2 放大器传递函数
放大器的作用是将脉冲信号转换为电流信号驱动电动机转动。运算放大器有较大的开环放大系数,且输入电流很小,因此可以忽略,采用经典放大电路,故放大器传递函数可表示为

在设计过程中,根据电压信号大小,取ka=6。
2.3 电机传递函数
电机采用电枢控制式直流电机,以电枢电流作为控制量,通过励磁线圈和电路建立电枢的定子磁场[10],此时电机转矩为

式中:TL(s)为负载转矩;Td(s)为扰动转矩,通常可以忽略不计。
当忽略Td(s)时,则

式中:J为转动惯量;b为电机内部摩擦因数;θ为电机轴旋转角度。而

式中:Km为电机常数,是永磁体材料磁导率的函数;Ia(s)为电枢电流。电枢电流与作用在电枢上的输入电压之间的关系为
Ua(s)=(Ra+Las)Ia(s)+Ub(s)(5)式中:Ra为电枢电阻;La为电枢磁感;Ub(s)为与电机速度成正比的反向感应电压,Ub(s)=Kbω(s),Kb为感应电压系数,ω(s)=θω(s)为角速度的拉普拉斯变换。因此电流为

根据式(2)~式(6),可知电机的传递函数为

对直流电机而言,可以忽略Ra/La的影响,故有
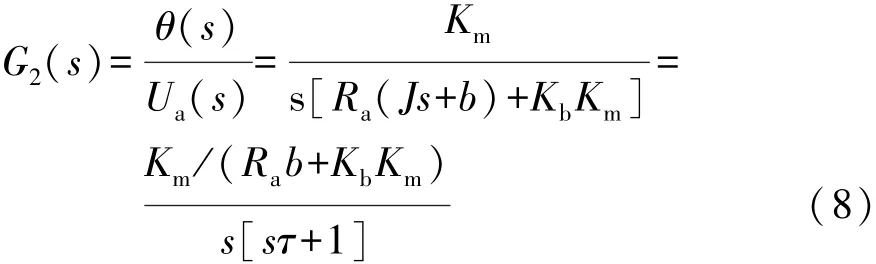
式中τ为电机等效时间常数,τ=RaJ/Rab+KbKm。
2.4 制动信号传递函数
在汽车制动的过程中,大角度尾翼攻角对汽车的制动性有着极大的提升,能有效减少制动距离和制动时间。由文献[9]可知,如果制动过程中尾翼攻角保持12°,汽车就能达到最佳的制动效能,因此,DRS控制系统如检测到制动信号则控制电机张开固定角度。制动信号由操作者踩踏制动踏板产生。制动踏板和行程开关相连,当制动踏板被踩下时,开关

2.5 机械传动传递函数
DRS系统机械传动过程使用一副齿轮实现减速增矩和传递动力的作用。为了定性分析系统机械传动过程,简化了控制过程,为此设传动系统刚性为无穷大的理想状态,且齿轮副无传动间隙。因为

N1ω1(t)=N2ω2(t)(10)式中:N1和N2分别为输入和输出齿轮的齿数;ω1(t)和ω2(t)为对应角速度。其拉普拉斯变换为闭合,由此发出一个制动信号。数据采集卡具有数字量输入功能,无输入时默认为高电平,因此可将行程开关与地相连。当开关闭合时,输出低电平信号,经过滤波器进入放大器,其传递函数可视为
根据电机本身功率和负载,取kc=0.5。
2.6 反馈系统的传递函数
反馈系统使用电位器作为信号变换装置,把机械角度位移量转换成电信号,通过电刷在电阻基体上的位移来测量不同的阻值,传感器滑轨连接稳态直流电压,与此同时,电刷与输出端之间的电压与电刷在电阻基体上滑过的角度成正比,且线性电位计的理想空载特性曲线应具有严格的线性关系。其输出与输入的函数关系为

式中kf为电刷单位角位移对应的输出电压。对式(12)进行拉普拉斯变换,并设输入为θf(s),输出为uf(s),则其传递函数为

kf取决于电源电压与电位器最大工作角度,取值为1.5V/rad。
根据图1所示的传递关系,可得出系统控制框图,如图4所示。

图4 系统的控制框图
当汽车正常行驶,驾驶员没有操作制动踏板,此时无制动信号,因此G3(s)=0。根据图4,利用经典控制理论,可求出此时系统的传递函数为

当驾驶员踩下制动踏板时,制动踏板触发控制器开关,系统会接收到一个制动信号输入信号z(s),此时系统ECU根据制动信号控制尾翼张开特定角度,以增大风阻,提高制动效能。此时原控制信号不再起作用,即,U0(s)=0。
根据图4,可求出制动时系统的传递函数为

电机参数查表可得到,如表1所示。

表1 电机参数
把G1(s)~G5(s)代入式(14)和式(15),并输入表1中电机参数,可得

运用Matlab绘制系统阶跃响应图,判断系统的稳定性,结果如图5和图6所示。
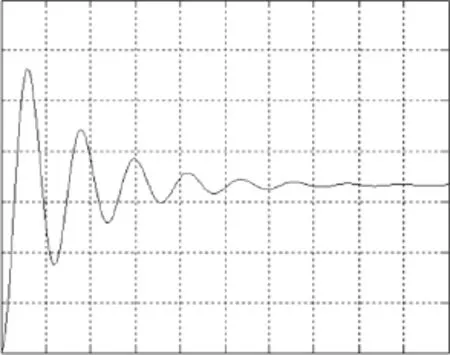
图5 Gx(s)阶跃响应

图6 Gz(s)阶跃响应
由图可见,随着时间的推移,系统的阶跃响应曲线逐渐趋于给定值,因此可以判定系统是稳定的。
3 样车试验
样车使用上海某汽车厂生产的微型三厢车,自适应可调控尾翼装车图见图7。试验中,首先验证汽车行驶过程中尾翼实际打开的攻角是否与预先给定的角度一致。为便于测量数据,试验在匀速条件下进行,此时加速度很小,可视为零。分别测量车速在20,40,60,80,100和120km/h时尾翼攻角,结果如图8所示。由图可见,尾翼在60km/h以下时不打开,60km/h以上时,随着车速的升高尾翼攻角逐渐增加,该变化规律与图2和图3中控制规律基本一致,可见尾翼攻角开度按照预期规律打开。

图7 自适应可调控尾翼装车图
在燃油经济性试验中采用等速百公里油耗作为指标,试验在高速路面上进行,分别测量在最高挡位下有尾翼和无尾翼时汽车的燃油消耗量。记录车速为40,50,60,70,80,90,100,110和120km/h时的燃油消耗量,试验结果如图9所示。
由图可见,当车速为40,50和60km/h时(即车速低于60km/h),尾翼攻角没有打开,汽车有无尾翼对汽车的燃油消耗量的影响非常小,可以忽略不计。证明汽车尾翼对汽车行驶阻力影响较小。

图8 部分车速下实测尾翼攻角角度
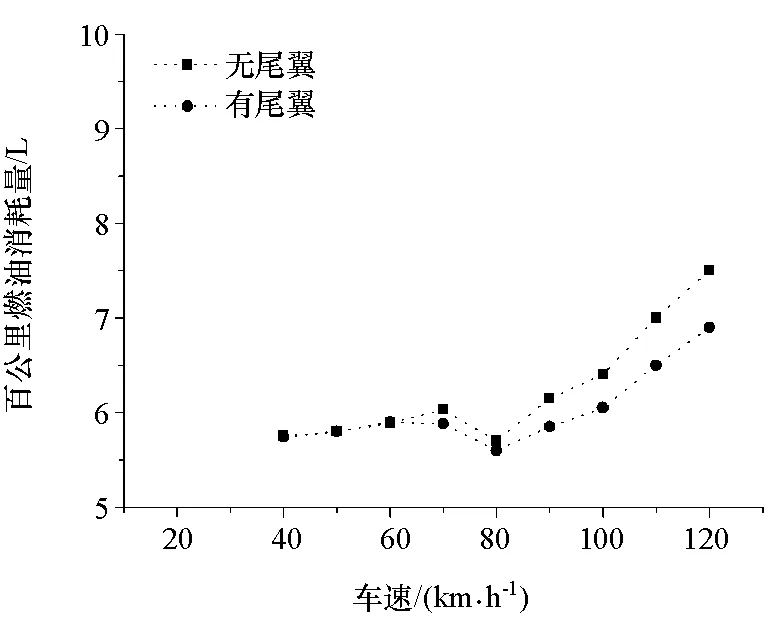
图9 百公里燃油消耗量对比图
当车速大于60km/h时,尾翼根据车速打开一定角度。车速在60-80km/h时,有尾翼时的汽车燃油消耗量开始比无尾翼时消耗量有明显降低。说明此时尾翼对汽车行驶阻力的影响在一定范围内有所增加。
当车速高于80km/h时,有尾翼时汽车燃油消耗量比无尾翼燃油消耗量降低幅度显著增大,且由图9中曲线走向趋势可知,随着车速的增加,尾翼对燃油消耗量的影响会进一步增加,说明尾翼攻角对高速行驶的汽车气动阻力有显著的影响,合适的尾翼攻角可有效降低汽车高速行驶的阻力,提高汽车的燃油经济性。
制动试验则在高附着路面上进行,ABS工作情况下记录汽车车速从120km/h-0时制动试验中有无尾翼的制动距离。有尾翼制动距离(69.3m)比无尾翼制动距离(70.4m)可减少1.1m,可见尾翼对汽车高速制动距离有显著影响。
4 结论
为提高汽车的操纵稳定性、动力性和燃油经济性,利用前人研究的成果确定了车速和加速度与尾翼攻角控制电压的关系。然后利用模糊控制算法求出DRS系统尾翼最佳攻角的控制信号。创建了系统的数学模型,优化了系统各部分的传递函数,并应用于控制器的硬件结构。利用Matlab对系统的稳定性进行了分析,实车试验结果表明,该系统对汽车高速行驶下的燃油经济性和制动性均有一定的提升。
[1] 谷正气,郭建成,张清林,等.某跑车尾翼外形变化对气动升力影响的仿真分析[J].北京理工大学学报,2012,32(4):248-249.
[2] DUMAS L,HERBERT V.Hybrid method for aerodynamic shape optimization in automotive industry[J].Computers&Fluids,2004,33(5):849-858.
[3] JOSEPH K,GARCIA D,SLUDER R.Aerodynamics of race car lift off[C].SAE Paper 2004-01-3506.
[4] 徐志宝.汽车外流畅CFD模拟[J].合肥工业大学学报(自然科学版)2007,30(12):162-163.
[5] 康宁,姜岩.尾翼攻角对斜背式轿车气动力特性影响的研究[J].空气动力学学报,2004,24(2):233-236.
[6] 蓝保祯,陈韵,孙晓天.基于CFD节能车随动尾翼节油技术分析[J].汽车工程,2012,34(4):17-21.
[7] 容江磊,谷正气,杨易,等.基于Kriging模型的跑车尾翼断面形状的气动优化[J].中国机械工程,2011,22(2):243-246.
[8] 许建民,王波,赵军.扰流装置对轿车气动特性的影响研究[J].机械设计与制造,2014(6):97-99.
[9] 陆文昌,王梓,陈龙,等.可调式扰流板对高速制动效能的影响[J].制造业自动化,2014,36(5):59-63.
[10] DORF R C,BISHOP R H.Modern control systems[M].Upper Saddle River:Prentice Hall,2014:46-48.
[11] 丁鹏,葛如海.基于模糊控制算法的纯电动汽车空调控制器的研发[J].计算机测量与控制,2015,23(12):4079-4083.
Development of a Vehicular Adaptive Adjustable Rear Airfoil System
Ding Peng1,Ge Ruhai2,Li Zhi3&Wang Ying1
1.WUXI Institute of Technology,Wuxi 214121; 2.Jiangsu University,Zhenjiang 212013; 3.Jiangnan University,Wuxi 214121
In view of the effects of the attack angle of rear airfoil on the fuel economy and handling and braking performances of vehicle,an electrically controlled drag reduction system(DRS)with adjustable rear airfoil is designed.The system utilizes fuzzy control algorithm to determine the control signal for optimum airfoil attack angle based on the relationship between attack angle and aerodynamic drag and lift related to driving speed.A mathematical model for the system is created and the transfer function of each part of the system is optimized and applied to the hardware configuration of the controller.The stability of the system is analyzed by matlab and a real vehicle verification test is conducted.The results show that the system improves the fuel economy and braking performance of vehicle.
vehicle;adjustable rear airfoil;DRS;fuzzy control;transfer function
葛如海,教授,博士生导师,E-mail:876239585@qq.com。动阻力系数和气动升力系数,提高汽车的操纵稳定性、动力性和燃油经济性;同时,在制动时DRS系统可升至特定的角度,增加气动阻力系数,减少制动距离,提高制动时的安全性。
10.19562/j.chinasae.qcgc.2017.08.007
