空间绳网多收口质量块收口过程动力学分析
2017-08-11郭吉丰周卫华
郭吉丰,易 琳,王 班,2,周卫华
(1. 浙江大学电气工程学院,杭州 310027;2. 杭州电子科技大学机械工程学院,杭州 310018)
空间绳网多收口质量块收口过程动力学分析
郭吉丰1,易 琳1,王 班1,2,周卫华1
(1. 浙江大学电气工程学院,杭州 310027;2. 杭州电子科技大学机械工程学院,杭州 310018)
针对空间绳网捕获应用,进行了多收口质量块收口过程的动力学分析。以一种自适应双卷筒卷取机构为研究对象,考虑包含有三个质量块的收口系统,通过建立收口质量块质点运动微分方程、收口绳长约束方程并利用非正交变换方法,给出了各收口质量块质心运动与缆绳卷取运动耦合的动力学模型,仿真分析了质量块平动发射和系统自旋发射等典型收口过程的运动特点,给出了一些收口过程的驱动控制策略,同时也说明此类自适应收口质量块具有较强的自适应性和容错性,适用于空间绳网捕获系统。另外,以上分析也适用于采用缆绳控制的绳系卫星编队系统。
空间绳网;收口质量块;收口过程;动力学;自适应
0 引 言
相比于空间刚性捕获,空间柔性捕获具有捕获距离远、容错性强、安全性高等优点。作为柔性捕获的典型代表,空间绳网捕获系统成为近年来的研究热点之一。空间绳网捕获系统中的收口质量块既要牵引绳网正常张开飞行,又要在绳网包裹目标物后实现网口的收紧,锁死目标物以防止其逃逸。
收口质量块可分为由电机驱动的机电式收口质量块以及由压缩弹簧驱动的机械式收口质量块[1-3]。收口过程中收口质量块两端缆绳的负载因各种情况会产生不均衡,须要有自适应能力,例如采用双转子的自适应收口质量块[4-5]。空间绳网捕获系统的收口过程是一个复杂过程,既要考虑收口质量块在缆绳约束下的相对运动,又要考虑收口质量块自身的刚体运动,避免缆绳与质量块之间的缠绕。文献[6-10]在空间绳网收口动力学分析中,将质量块作为质点处理,而忽略了质量块的自身运动并掩盖了质量块翻滚与缠绕问题。文献[11]建立了自适应双卷取机构单收口质量块的卷取理论,但未考虑在绳网收口过程中出现的多个收口质量块通过柔性缆绳相互耦合的卷取过程。事实上,当收口质量块驱动电机启动开始卷取网口缆绳时,缆绳上的拉力会对收口质量块质心运动产生影响,同时收口质量块对缆绳的卷绕又改变了各机构间的位置约束反过来又影响了缆绳的张力。因此,有必要对多个通过缆绳相互连接的收口质量块收口动力学进行研究,探索空间多收口质量块协同卷取缆绳的驱动控制策略。从这个意义上说,空间绳网多质量块收口问题类似于绳系卫星编队飞行构形控制问题[12-14]。
针对空间绳网捕获系统应用,根据课题组前期研制的双转子收口质量块及单个收口质量块收口过程的动力学模型[11],本文建立了空间绳网多收口质量块收口过程的动力学模型,并对几种典型的收口过程进行了仿真,分析系统初始条件对收口构形的影响。
1 收口过程系统动力学模型
1.1 模型描述及系统设定
自适应双卷筒收口质量块如图1所示,电机内转子通过减速器带动卷筒1,外转子(即电机本体)带动卷筒2,电机伺服驱动控制器及供电电池也可固定在卷筒2内。两个卷筒外通过轴承固定支撑一个能自由滚动的导绳套筒,两个导绳入口基本相对,在轴向略微错位,在周向相差180°。电机工作时,两卷筒相向旋转,分别卷取收口缆绳1和收口缆绳2。自由导绳套筒的作用是克服电机启动阶段因惯性力矩产生的旋转,使得收口缆绳入口位置基本不变,特别是一个卷筒收完收口缆绳后堵转,而另一收口缆绳仍需卷取的场合,自由的导绳套筒可防止收口缆绳缠绕,其自适应的机理和效果已得到证实[11]。
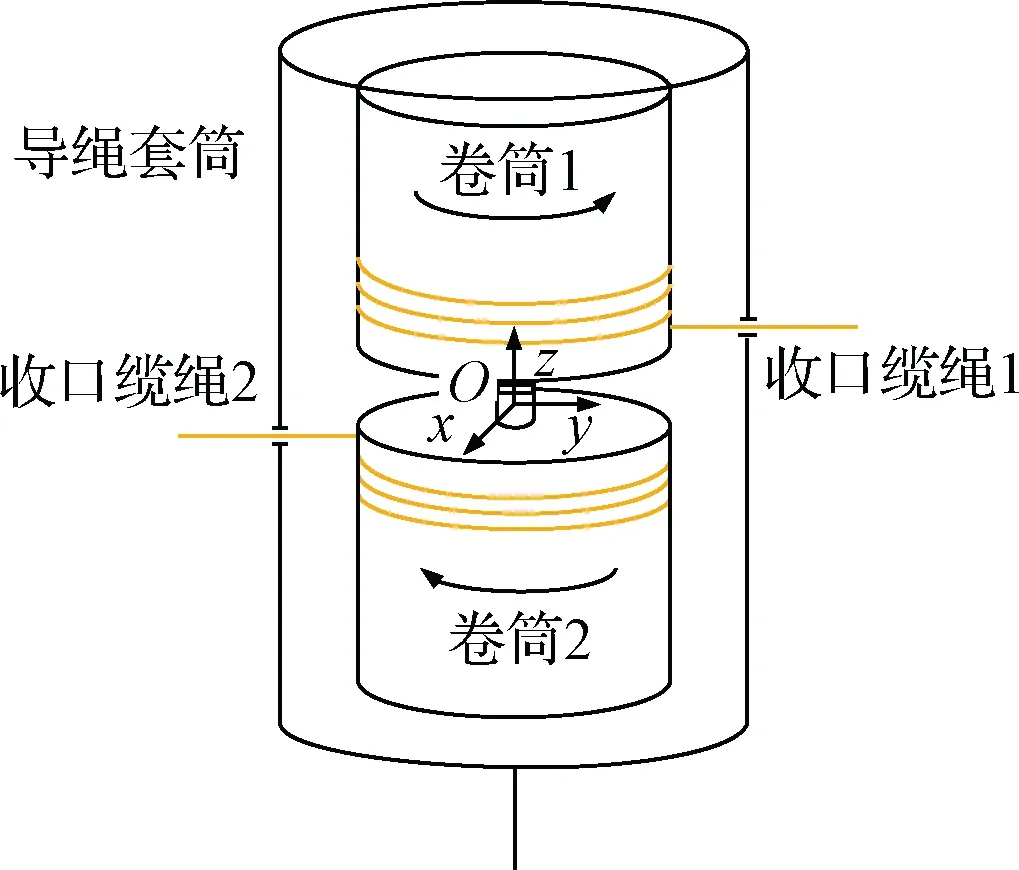
图1 收口质量块结构示意图Fig.1 Structural diagram of the adaptive take-up mass block
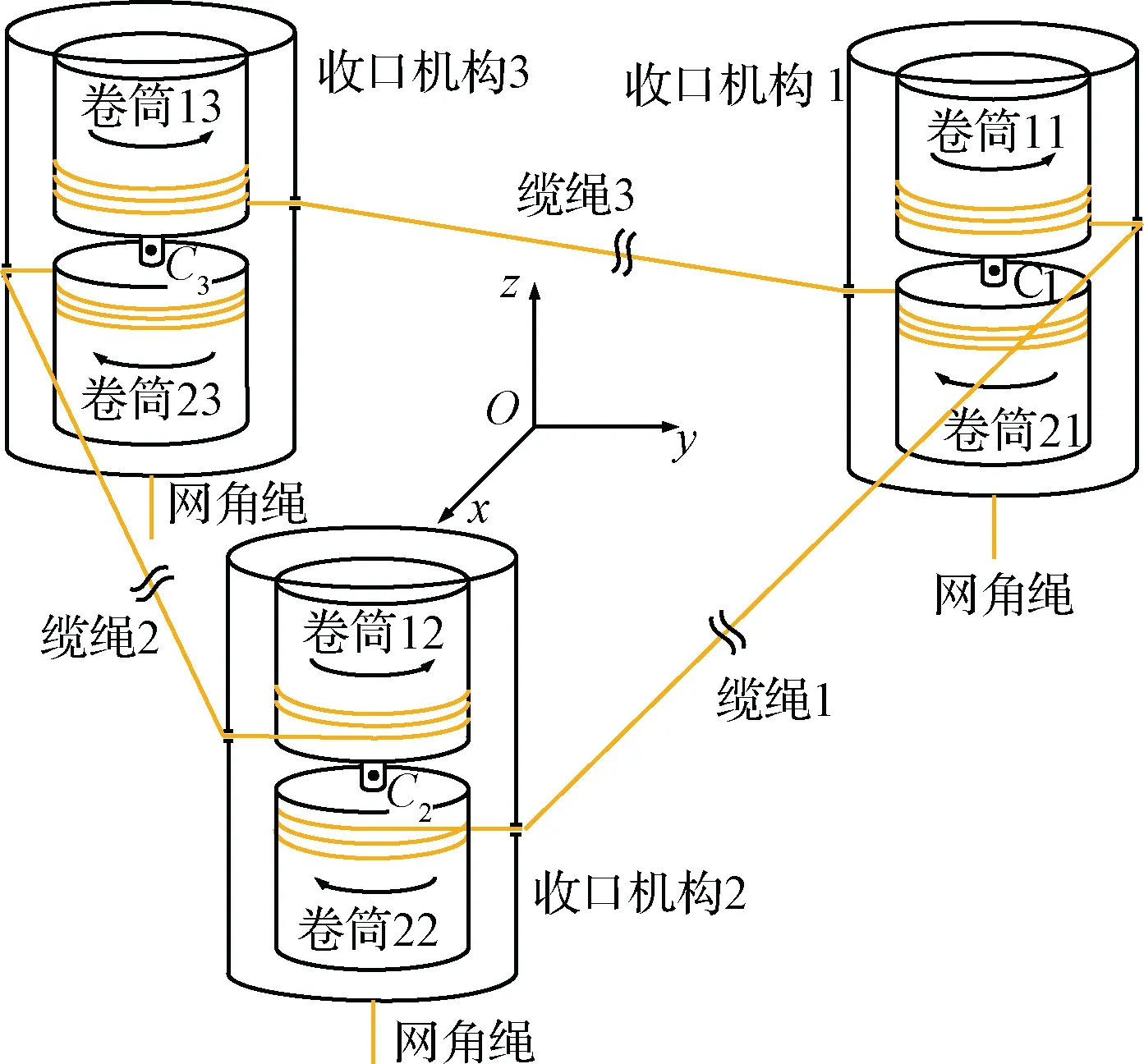
图2 三收口质量块收口系统示意图Fig.2 The diagram of take-up system with three mass blocks
三个收口质量块之间通过收口缆绳首尾依次连接组合为一个闭合三角形,在悬浮失重环境下自由飞行,如图2所示,其连接方式有4种,本文考虑11与22连接、12与23连接和13与21连接这种连接方式进行分析。三收口质量块收口系统中,每一收口机构有三个刚体,系统共有9个刚体和3根缆绳,为分析简化起见,作如下设定:
1) 收口质量块收口过程中处于自由状态,各收口质量块尾部网角缆绳不对其产生拉力作用;
2)在微重力场下运动,收口空间范围较小,忽略轨道运动产生的重力梯度力及Coriolis加速度;
3)收口缆绳为轻质材料,在绳长较短时,其质量忽略不计,同时缆绳弹性、阻尼以及横向振动也可不予考虑,缆绳张力沿绳长方向且处于张紧状态;
4)收口质量块的直径与缆绳的长度相比要小得多,收口质量块导绳口的旋转角度位置不会对缆绳的方向产生影响,在考虑收口队形时可以将收口质量块当作质点处理。
1.2 收口质量块质心运动的动力学方程
收口质量块1、2、3的质量分别为m1、m2和m3。根据由上述假设条件将收口质量块当作质点处理,以空间中任意一点为原点,Oxy平面与三个收口质量块质心平面重合,建立静止的笛卡尔坐标系。描述空间绳系收口平面运动模型如图3所示,坐标系的z轴在图中未标出,方向垂直于纸面朝外,图3对各个收口质量块之间通过缆绳张力相互牵引力进行了分析。
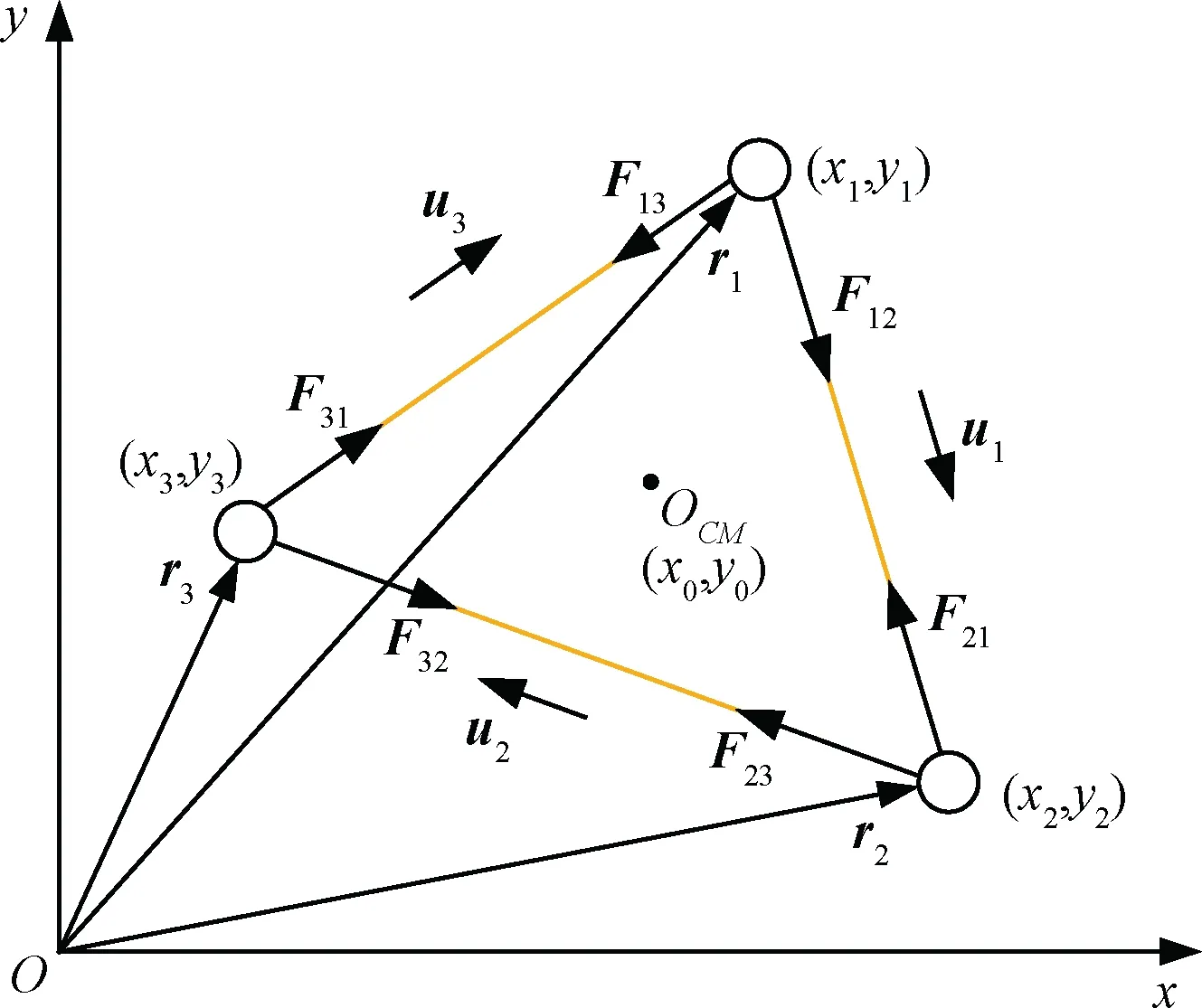
图3 收口系统面内受力分析Fig.3 Force analysis of take-up system
原点到收口质量块1、2和3质心的矢径分别为r1、r2和r3,质心坐标分别为(x1, y1)、(x2, y2)和(x3, y3),OCM为多收口质量块收口系统质心,其坐标为(x0, y0)。三根缆绳的张力大小分别为F1、F2和F3。u1、u2和u3为分别与三根张紧缆绳平行的单位向量,方向如图所示,可称之为缆绳方向矢量。Fij为第i个收口质量块受到指向第j个收口质量块缆绳的拉力(i=1,2,3;j=1,2,3且i≠j)。设惯性坐标系Oxyz的基矢量分别为ex,ey和ez。缆绳方向矢量为:
(1)
令u1、u2和u3与x轴正向的夹角分别为θ1、θ2和θ3,则式(1)可表示为:
ui=(cosθi,sinθi),i=1,2,3
(2)
不考虑缆绳的质量,缆绳对两端的收口质量块的拉力为一对作用力与反作用力。有:
(3)
收口质量块是轴对称的几何结构,卷筒和导绳套筒的旋转不会改变整个机构质心的位置,根据质心运动定理由两个卷筒和一个导绳套筒组成的收口质量块质点系质心运动满足:
(4)
在平面内任意两个不共线的向量都可以作为一组基底,因此只要编队保持三角形构形,任意两个缆绳方向向量u1、u2和u3都能作为基底来线性表示平面内的向量。由式(2)可以得到由缆绳方向向量组合的三组基底与坐标系基矢量的关系:
(5)
(6)
(7)
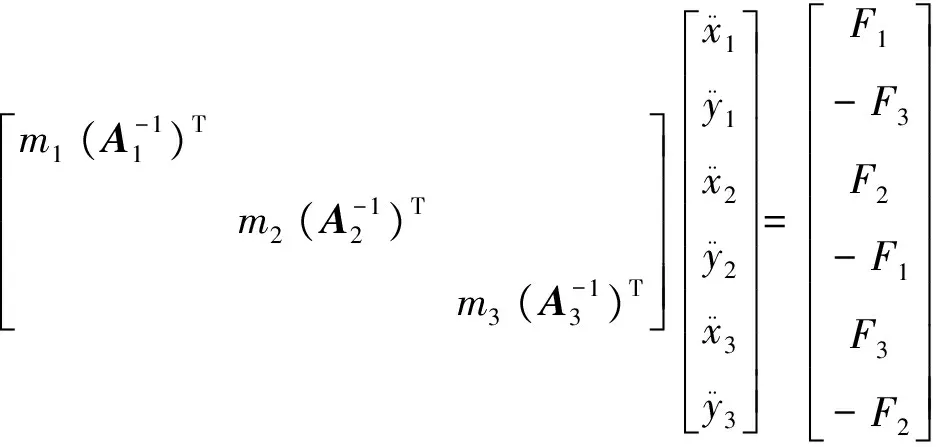
u1、u2和u3两两互不共线,式中变换矩阵Ai(i=1,2,3)是可逆的。由上面三式和质点加速度方程可得:
(8)
(9)
(10)
(11)
1.3 收口质量块卷取动力学方程
对于一般的质量均匀分布的轴对称刚体,其绕对称轴(对于收口质量块而言即为图1中的Oz轴)的转动与其他两个方向的转动是解耦的[15]。因此,在分析收口质量块的卷取动力学时,姿态是否翻滚不会影响其绕对称轴旋转的卷取动力学分析。图2中三个收口质量块的卷取动力学分析方法是相同的,以卷取机构1为例来说明[11]。收口质量块卷取时受力情况如图4所示。选取其质心C1为原点,建立原坐标系Oxyz的平动坐标系C1X1Y1Z1,其中C1Z1轴垂直纸面向外。
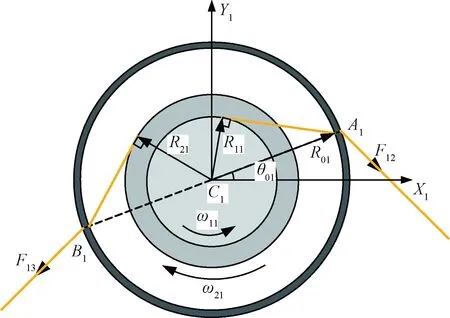
图4 收口质量块的受力分析Fig.4 Force analysis of single take-up mass block
缆绳1和3在导绳套筒外部对其产生的力矩为:
R01×(F12-F13)=R01×(F1u1+F3u3)
(12)
其中,R01为导绳口A1到质心C1的矢径
R01=(R01cosθ01,R01sinθ01)
(13)
将式(2)和式(13)代入式(12)可得:
R01×(F12-F13)=
R01[F1sin(θ1-θ01)+F3sin(θ3-θ01)]ez
(14)
对于收口质量块2和3,同理可得:
R02×(F23-F21)=
R02[F2sin(θ2-θ02)+F1sin(θ1-θ02)]ez
(15)
R03×(F31-F32)=
R03[F3sin(θ3-θ03)+F2sin(θ2-θ03)]ez
(16)
将双卷筒卷取机构系统状态方程[11]中关于外部缆绳对导绳套筒力矩项用式(14)、(15)和(16)中基矢量ez前面的标量式替换,并更改相应下标可得:
(17)
式中:i=1,2,3分别代表第i个收口质量块,Fi和θi分别为第i根缆绳的张力和方向角,特别地,当i=1时i-1用3代替,其它符号含义参考文献[11]。
1.4 绳长约束方程
三根缆绳保持张紧状态,不考虑缆绳的弹性,每一根缆绳的总长度是不变的,根据这一绳长约束可得下列约束方程:
(18)
2 算例分析
空间绳网捕获系统的各收口质量块一般为同一规格,可假定收口质量块各模型参数相同,均采用文献[11]中的参数。由于系统模型具有较强的非线性,状态变量和自由度较多,相同输入条件下各收口机构的位姿状态变量初始状态不确定,而且变量之间存在较强的耦合,给系统分析带来了很大困难。本节选取几种典型的情况进行对比分析,得到收口质量块几种工况下会遇到的问题,以及如何建立一些驱动控制准则避免这些问题的方法,同时也可进一步验证课题组前期提出的双卷筒加自由导绳套筒的自适应收口质量块的有效性。
2.1 收口质量块平动发射工况分析
多收口质量块收口系统t=0的初始时刻质心位置和速度如表1所示,且各收口质量块卷筒和导绳套筒的初始角速度都为0,收口质量块各卷筒的初始姿态角满足式(18)的绳长约束方程。
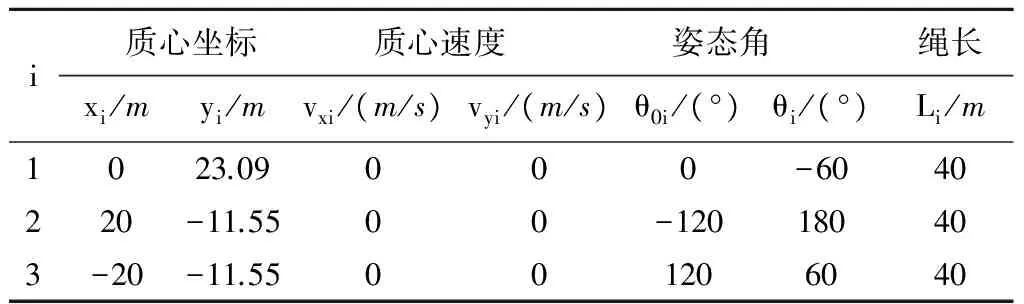
表1 多收口质量块收口系统的初始状态(平动发射)
三个收口质量块的电机驱动输入电压相同,均以0.5V/s的斜率线性增加直到额定电压12V后保持恒定,仿真结果如图5所示。质量块的质心运动轨迹图5(a)所示,图中标记点代表每2s时间间隔记录的各质量块质心位置,轨迹1、轨迹2、轨迹3分别对应质量块1、2、3的质心运动轨迹。从图5(b)和(c)可以看出,三根缆绳一直处于张紧状态,在t=1.5s时电机电压增加使电磁转矩足够克服摩擦力矩驱动电机旋转卷取缆绳,在缆绳上产生了约0.055N的张力。当t=24s时,电机驱动电压到达额定值12V无法再往上升,电机停止了加速而维持匀速旋转,此时缆绳上张力为零,质量块质心运动也开始以与电机卷取速度相对应的速度做匀速运动。t=25s后收口质量块间的缆绳长度接近于0,完成了收口过程。图5(d)代表三个收口质量块导绳套筒与相邻两根缆绳的夹角变化,Δθ1i=θi-θ0i,Δθ2i=θi-1-θ0i,从图中可以看出,质量块导绳套筒分别与相邻的两根缆绳间夹角在很小的范围内变化,绝对值没有超过90°,缆绳不会在导绳套筒外壳缠绕。
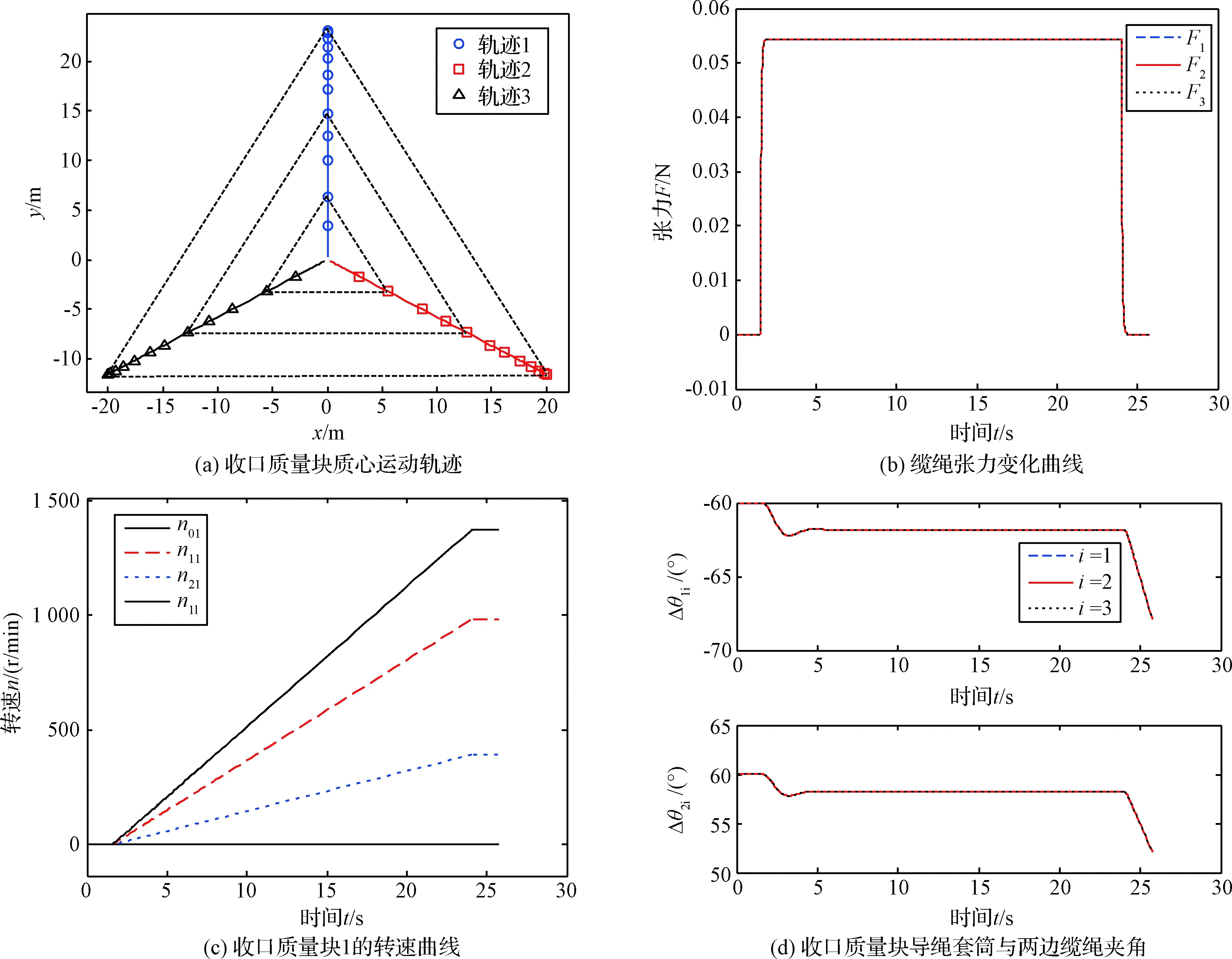
图5 收口质量块平动发射仿真结果(电压上升率0.5 V/s)Fig.5 Simulation results under translational emission (rising rate of voltage 0.5 V/s)
为加快收口速度,采用2V/s的电压上升率,仿真结果如图6所示,由质量块质心运动轨迹(见图6(a))可知质量块质心运动加速明显,在t=5s时,缆绳长度已减少了5m左右,在t=16s左右时,缆绳长度接近于0,完成了收口过程。在t=6s后由于收口质量块的导绳套筒受到内部两个卷筒的摩擦力稍有不平衡,而维持平衡的缆绳张力作用消失,故导绳套筒以很小的转速旋转,但随着时间的增加,套筒与缆绳的相对角度逐渐增大,导致了缆绳在外壳上发生轻微缠绕,在收口完成前已经显现了缆绳缠绕的趋势。
不难预见,电压上升率增加,电机的加速时间将更加缩短,缆绳张力维持时间也更短,当给系统施加12V阶跃电压时,三个收口质量块加速运动过程非常短(在1s以内),结果发生了缠绕,限于篇幅这里没有给出仿真结果。此外,在收口质量块质心初始位置不对称分布时,也能有效完成收口过程。
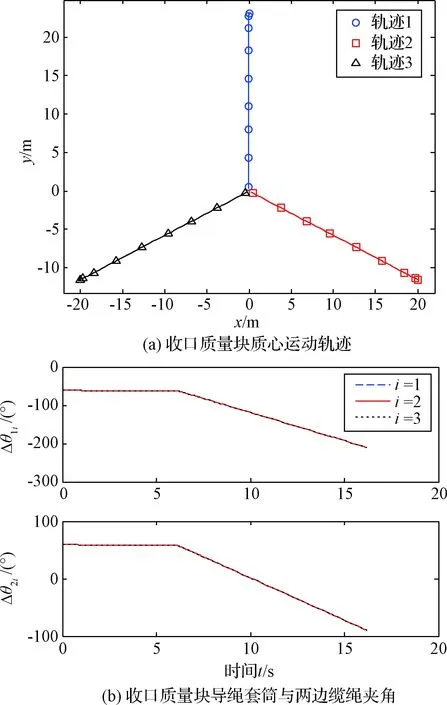
图6 收口质量块平动发射仿真结果(电压上升率2 V/s)Fig.6 Simulation results under translational emission (rising rate of voltage 2 V/s)
2.2 收口质量块系统自旋发射工况分析
当t=0,质心位置和速度如表2所示,各收口质量块卷筒和导绳套筒的初始角速度都为0,收口质量块各卷筒的初始姿态角满足绳长约束方程。表2状态与表1状态相比,表明收口质量块质心有初始运动速度,且速度方向垂直于收口质量块质心到整个编队系统质心的矢径,系统质心位置与坐标原点重合。由于没有外力矩作用,系统符合动量矩守恒条件。即对三个质量块的质心而言是旋转的初速度,称之为收口系统自旋发射。
三个收口质量块的电机驱动输入电压相同,均以2V/s的斜率线性增加直到额定电压12V后保持恒定,仿真结果如图7所示。由图7(a)可知,在整个收口过程中系统保持了等边三角形的构形旋转,初始时刻收口质量块质心的运动速度是切向的,方向垂直于收口质量块质心到原点的矢径,但收口质量块对缆绳的卷取作用改变了这种圆周运动趋势,在t=0.7~6s间收口质量块质心做变加速曲线运动,加速度方向随质心位置变化时刻在变化,加速度大小基本不变。在t=6~12s内,电机输入电压保持在12V不变,缆绳张力也下降较多,收口质量块质心运动与匀速直线运动接近。当t=12s后,随着缆绳长度缩短,收口质量块之间越来越靠近,编队三角形也在旋转,缆绳方向不断发生改变,当收口质量块受到缆绳拉力合力方向旋转到与收口质量块质心速度方向夹角足够大时,拉力开始改变收口质量块质心速度方向,收口质量块运动方向的改变反过来又增加了收口质量块质心速度和缆绳拉力合力方向的夹角。另一方面,编队三角形的边长减小会使收口质量块质心曲线运动的曲率半径变小,产生的离心力增大,从图7(b)可以看出,缆绳的张力在t=12s后急剧增加。从图7(c)可以看出,收口质量块的电机转速随缆绳张力增大而快速降低,直到电机对卷取运动的驱动力和收口质量块质心运动离心力达到平衡,收口质量块电机在t=17s左右停止了旋转,之后收口质量块不再卷取缆绳,缆绳长度也不发生改变,整个三角形编队绕着系统质心做匀速圆周运动,即产生了一个直径2米多的小网口。若将收口质量块绕自身轴旋转运动当作自转,收口质量块轴绕编队系统质心的旋转当作公转,从图7(c)可知,在t=17s后自转转速等于公转转速。由动量矩守恒可知矢径旋转速度与其大小的平方成反比关系,而产生的离心力FCi= M0i/(mri3),离心力与矢径大小三次方成反比。因此,随着收口质量块之间距离的靠近,三角形编队自旋的角速度迅速增大,离心力则增加得更快,导致缆绳张力急剧增大现象。由图7(d)可知,在收口质量块做曲线运动时,缆绳受离心力作用会产生持续的张力,不会在导绳套筒外缠绕。由此可见,因收口质量块电机最大输出力矩的限制,必须控制收口质量块编队自旋的初始角速度,使最后收口口径尽量小,以防止目标物从小网口挣脱。
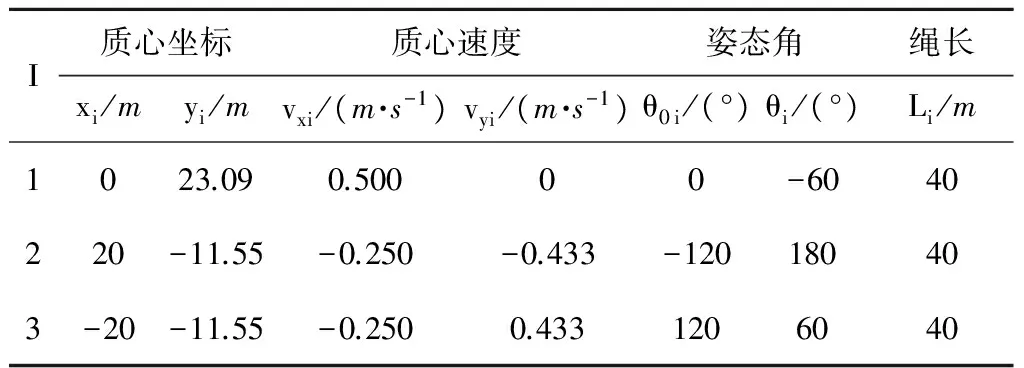
表2 收口质量块编队系统的初始状态(系统自旋发射)

图7 收口系统自旋发射仿真结果(对称)Fig.7 Simulation results under spin emission (symmetrical)
前面对编队系统的收口质量块初始速度为零的情况,分析过输入阶跃电压会导致缆绳张力持续时间很短容易造成缠绕。同样,当系统初始状态自旋时,输入阶跃电压后,因系统有离心力的作用张紧缆绳产生张力,故此种状态下缆绳也不容易发生缠绕,这里不再对其仿真结果进行展开。
上述初始状态都是对称的,当初始速度并不是严格地满足匀速圆周运动初始条件时,如改变表2中vy1=0.5m/s,模拟收口质量块1初始速度有y方向的偏差的情形(仿真结果如图8所示),收口系统也能顺利地完成收口过程,缆绳也不会缠绕。
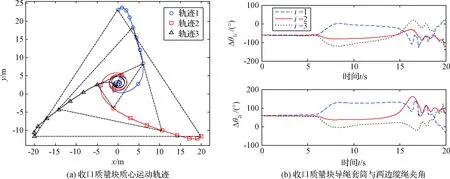
图8 收口系统自旋发射仿真结果(非对称)Fig.8 Simulation results under curvilinear motion (unsymmetrical)
3 结 论
针对空间绳网三收口质量块在收口过程中防缠绕与可靠收口问题,本文采用牛顿-欧拉法对收口系统进行了动力学分析与建模,通过使用非正交变换方法,将收口质量块质心运动加速度分解到缆绳方向,给出了质心加速度和缆绳张力关系,结合自适应双卷筒卷取机构的缆绳卷取理论和缆绳绳长约束方程,得到了系统动力学方程,仿真分析表明:
1) 初始状态决定了整个收口质量块收口系统的构形,当收口质量块质心系统平动和旋转两种情形时,当电机驱动电压逐渐增加时,都能顺利完成收口过程,收口质量块存在自适应性能够让不同缆绳张力保持一致,使得缆绳拉力对收口质量块的合力总是指向三角形编队中心。初始状态非对称时,收口质量块也能顺利地完成收口过程,具有较强的容错性和自适应性。
2)收口质量块系统有自旋发射时,收口质量块的离心力能够使缆绳产生张力作用,离心力的大小与编队构形半径的三次方成反比,随着收口质量块相互接近时,离心力加速增大,最终会与收口质量块驱动电机驱动力平衡,收口质量块系统做匀速圆周运动。自旋发射有助于防缠绕,稳定收口,但会出现一个无法收完的小网口,其大小取决自旋速度和电机最大驱动力。
本文方法可以推广到任意数量的收口质量块绳系编队动力学建模,对于采用缆绳控制的绳系卫星编队系统飞行建模也有参考意义。
[1] 陈钦. 空间绳网系统设计与动力学研究[D]. 长沙: 国防科学技术大学, 2010. [ChenQin.Designanddynamicsofanorbitalnet-capturesystem[D].Changsha:NationalUniversityofDefenseTechnology, 2010.]
[2]BischofB,KersteinL.ROGERroboticgeostationaryorbitrestorer[J].ScienceandTechnologySeries, 2004, 109:183-193.
[3] 赵国伟, 谭春林, 刘永健, 等. 一种用于空间飞网收口的双驱并置收线装置: 中国, 201310504637.X[P].2013-10-23.
[4] 王波, 郭吉丰. 采用超声波电机的空间飞网自适应收口机构设计[J]. 宇航学报, 2013, 34(3):308-313. [WangBo,GuoJi-feng.Designofself-adaptativetake-upmechanismforspacenetusingultrasonicmotor[J].JournalofAstronautics, 2013, 34(03):308-313.]
[5] 王波, 郭吉丰. 空间飞网质量块动力学分析及收口机构优化设计[J]. 宇航学报, 2012, 33(10):1377-1383. [WangBo,GuoJi-feng.Dynamicsanalysisofmassblockandoptimizationdesignoftake-upmechanismforspacenet[J].JournalofAstronautics, 2012, 33(10):1377-1383.]
[6] 陈钦, 杨乐平, 张青斌. 空间飞网发射动力学建模仿真研究与地面试验[J]. 国防科技大学学报, 2009, 31(3):16-19. [ChenQin,YangLe-ping,ZhangQing-bin.Dynamicmodelandsimulationoforbitalnetcastingandgroundtest[J].JournalofNationalUniversityofDefenseTechnology, 2009, 31(3):16-19.]
[7] 于洋, 宝音贺西, 李俊峰. 空间飞网抛射展开动力学建模与仿真[J]. 宇航学报, 2010, 31(5):1289-1296.[YuYang,Bao-yinHe-xi,LiJun-feng.Modelingandsimulationofprojectingdeploymentdynamicsofspacewebs[J].JournalofAstronautics, 2010, 31(5):1289-1296.]
[8] 赵国伟, 熊会宾, 黄海, 等. 柔性绳索体展开过程数值模拟及实验[J]. 航空学报, 2009, 30(8):1429-1434. [ZhaoGuo-wei,XiongHui-bin,HuangHai,etal.Simulationandexperimentondeploymentprocessofflexiblerope[J].ActaAeronauticaetAstronauticaSinica, 2009, 30(8):1429-1434.]
[9] 张青斌, 孙国鹏, 丰志伟,等. 柔性绳网动力学建模与天地差异性分析[J]. 宇航学报, 2014, 35(8):871-877. [ZhangQing-bin,SunGuo-peng,FengZhi-wei,etal.Dynamicsmodelinganddifferentiaanalysisbetweenspaceandgroundforflxiblecablenet[J].JournalofAstronautics, 2014, 35(8):871-877.]
[10] 马骏, 黄攀峰, 孟中杰, 等. 自主机动空间绳网机器人设计与动力学建模[J]. 宇航学报, 2013, 34(10):1316-1322. [MaJun,HuangPan-feng,MengZhong-jie,etal.Designanddynamicsmodelingofautonomousmaneuveringtethered-netspacerobotsystem[J].JournalofAstronautics, 2013, 34(10):1316-1322.]
[11] 易琳, 王班, 黄海, 等. 一种用于空间系绳卷取的自适应机构[J]. 宇航学报, 2014, 35(12):1379-1387.[YiLin,WangBan,HuangHai,etal.Anadaptivemechanismforspacetetherreel[J].JournalofAstronautics, 2014, 35(12):1379-1387.]
[12]ChungSJ,MillerDW.Propellant-freecontroloftetheredformationflight,part1:Linearcontrolandexperimentation[J].JournalofGuidanceControlandDynamics, 2008, 31(3):571-584.
[13]MoriO,MatunagaS.Formationandattitudecontrolforrotationaltetheredsatelliteclusters[J].JournalofSpacecraftandRockets, 2007, 44(1):211-220.
[14]TangJL,RenGX,ZhuWD,etal.Dynamicsofvariable-lengthtetherswithapplicationtotetheredsatellitedeployment[J].CommunicationsinNonlinearScienceandNumericalSimulation, 2011, 16(8):3411-3424.
[15]ChungSJ,MillerDW.Propellant-freecontroloftetheredformationflight,part1:Linearcontrolandexperimentation[J].JournalofGuidance,Control,andDynamics, 2008, 31(3):571-584.
通信地址:浙江省杭州市浙大路38号教二楼319室(310027)
电话:15168205572
E-mail:gjf@zju.edu.cn
王 班(1988-),男,博士后,讲师,主要从事空间机器人及空间结构设计等研究。本文通信作者。
通信地址:浙江省杭州市浙大路38号教二楼114室(310027)
E-mail:bigban@zju.edu.cn
Dynamic Analysis of Take-Up Process for Space Tethered-Net
GUO Ji-feng1, YI Lin1, WANG Ban1,2, ZHOU Wei-hua1
(1. College of Electrical Engineering, Zhejiang University, Hangzhou 310027, China; 2.School of Mechanical Engineering, Hangzhou Dianzi University, Hangzhou 310018, China)
Dynamics of the take-up process is analyzed in the application of take-up system into space tethered-net capture. Dynamic model of the coupling between the motion of the mass center of mass blocks and the coiling motion of tether for a take-up system with three mass blocks is developed with the help of non-orthogonal transformation, considering the differential equations of the mass block and the constraint of tether length. Motion characteristics of several typical take-up processes, such as translational emission of the mass blocks and spin emission of the system, are simulated and some drive strategies for the take-up process are thus proposed and validated. It is shown that this kind of adaptive take-up mass blocks is strongly self-adaptive and fault tolerant and thus appropriate for space tethered-net capture system. Besides, above analysis is also applicable to the tether-controlled space tethered satellite formation system.
Space tethered-net; Take-up mass block; Take-up process; Dynamics; Self-adaptive
2017-03-27;
2017-05-11
国家自然科学基金(51475411);浙江省自然科学基金(LQ17E050011)
V526
A
1000-1328(2017)07-0669-09
10.3873/j.issn.1000-1328.2017.07.000
郭吉丰(1964-),男,博士,教授,博士生导师,主要从事机器人及压电驱动技术等研究。
