载人月球车单轮月面直线加速行驶的模拟算法
2017-08-11梁忠超王永富高海波邓宗全
梁忠超,王永富,金 马,高海波,邓宗全
(1. 东北大学机械工程与自动化学院,沈阳 110819;2. 哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨 150080)
载人月球车单轮月面直线加速行驶的模拟算法
梁忠超1,王永富1,金 马2,高海波2,邓宗全2
(1. 东北大学机械工程与自动化学院,沈阳 110819;2. 哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨 150080)
当载人月球车(LRV)的车轮在地面与月面使用相同的驱动方式时,重力加速度的不同会导致其产生完全不同的直线运动加速度。针对上述问题,以单个车轮为研究目标,首先建立车轮垂直载荷、挂钩牵引力、驱动力矩的力学模型,分析月面与地面重力条件下能够产生相同直线加速度的车轮运动条件,然后推导同直线加速度运动时车轮力矩驱动的模拟算法。最后,对比月面、地面采用模拟算法、地面不采用模拟算法的三种情况下单个车轮直线加速度,验证模拟算法。计算结果表明:采用模拟算法驱动的地面车轮在与月面同质量或同垂直载荷情况下均可保持相同的直线运动加速度,而不使用模拟算法的地面车轮无法获得相同的直线加速度。
载人月球车;地面力学;直线加速;模拟算法
0 引 言
月球是距离地球最近的天体,月球探测是人类对于外天体探测的第一步。由于月面具有丰富的空间资源和矿物资源[1-3],因此月球探测在政治、军事、科技和经济等方面具有重大意义。中国已开展了各项月球探测活动,并将月球探测活动分为“绕、落、回”三个阶段,计划于2030年后实现月球探测的“驻”月阶段[4-5]。
载人月面探测是建立月球基地的基础[6],载人月球车作为宇航员所使用的探测工具,它既可以扩大宇航员月面探测范围,也可以扩展宇航员的月面执行任务能力,还可以降低宇航员的月面工作强度[7-8]。但是由于月面具有低重力、真空等特点[9],宇航员在月面驾驶载人月球车时比在地面条件下具有更高的难度和更大的工作强度。因此,在地面条件下预先对宇航员进行相关的训练,展开相关的地面模拟月面的实验具有很重要的意义。
地面重力加速度约是月面的6倍,如果在地面进行实验的模拟车与月面的载人月球车具有相同质量时,地面模拟车的车轮垂直载荷将是月面载人月球车车轮的6倍,此时若采用相同的车轮驱动力矩,将无法产生相同的挂钩牵引力,最终导致无法产生相同的直线加速度。如果在地面进行实验的模拟车是月面载人月球车质量的1/6时,车轮垂直载荷相同,此时若采用相同的车轮驱动力矩,虽然可以产生相同的挂钩牵引力,但是由于质量的不同,也无法产生相同的直线加速度。
目前在地面条件下模拟月面载人月球车进行实验的方法主要有两种:质量等效法[10]和悬挂重力补偿法[11-13]。其中质量等效法是在地面条件使用模拟车的质量为月面载人月球车质量的1/6,从而获得相同的车轮垂直载荷。该方法在地面与月面使用相同的车轮驱动力矩时,可获得相同的挂钩牵引力,但是由于质量的不同,无法获得相同的直线行驶加速度。悬挂重力法是将完全相同的载人月球车悬挂起来,通过钢丝的拉力,平衡和补偿约5/6的重力,最终实现与月面车轮相同直线运动加速度。但是这种方法受到了场地的限制,并且悬挂钢丝的恒定拉力也较难控制。
在地面条件使用模拟车模拟月面条件载人月球车的直线加速运动,对于驾驶员来说就是在地面和月面都采用同样的操纵杆输入,能够获得相同的直线行驶加速度。即驾驶员不管在地面还是月面,均使用操纵输入uA时,能够获得
aL=aE
式中:aL为月面载人月球车直线运动加速度,aE为地面模拟车直线运动加速度。
为了克服质量等效法和非悬挂法的局限性,以单个车轮为研究对象,推导模拟算法控制和改变地面车轮的驱动力矩,在地面模拟车与月面载人月球车相同质量或相同垂直载荷的情况下,实现对月面载人月球车直线行驶模拟的目标。
1 车轮直线运动的力学模型
根据Bekker提出的承压模型,车轮-土壤作用面的平均正压力为[7-8]
σ=(kc/b+kφ)zn
(1)
式中:σ为压板下部平均法向应力,b为压板的短边长度或半径,kc为内聚力变形模量,kφ为摩擦变形模量,n为沉陷指数,z为压板下陷量。
车轮下方所受到的剪切应力,根据Janosi的土壤剪切模型,土壤的剪应力与剪切位移存在如下关系[7-8]
τ=τmax(1-e-j/j0)=(c+σtanφ)(1-e-j/j0)
(2)
式中:c为土壤内聚力,φ为内摩擦角,j0为剪切变形模量。
定义车轮的挂钩牵引力
(3)
式中:T为车轮驱动扭矩,Tf为压缩土壤时产生的阻力矩。从式(3)可以看出,挂钩牵引力为车轮驱动扭矩克服压缩土壤的阻力矩后所产生的牵引力,只有当T大于Tf时车轮才可能产生直线加速度。
根据车轮的几何关系,
z=r(1-cosθ1)
(4)
j=r[(θ1-θ)-(1-s)(sinθ1-sinθ)]
(5)
式中:r为车轮的有效半径;θ1为车轮的进入角,同时也是沉陷量参数;j为土壤的剪切变形;s为车轮的滑转率。
车轮在行进过程中,由于滑转现象,车轮的正压力分布的峰值并不在其正下方,而是产生角度θm角度的偏移[14],
(6)
式中:c1和c2为最大应力角系数。
根据Wong-Reece的正应力分布模型[15],可得车轮的垂直载荷、挂钩牵引力、驱动力矩的计算式:
(7)
(8)
(9)
式中:θ2为车轮离去角,且有θ2=-0.125θ1。
2 相同加速度的车轮运动条件
根据被动滑转原理[16-17],当已知土壤参数时,可将式(7)~(9)的三个方程转化为沉陷量参数θ1和滑转率s的函数方程。则当载人月球车在月面行驶时,其车轮垂直载荷为WL,挂钩牵引力为FDPL,驱动力矩为TL,可以得到在月面重力条件沉陷量参数θ1L和滑转率sL的函数方程,即
(10)
同理可得
(11)
式中:对于地面条件下的单个车轮,WE为垂直载荷;FDPE为挂钩牵引力;TE为驱动力矩;θ1E为沉陷量参数;sE为滑转率。
定义月面和地面条件下载人月球车的直线加速度比值ia,根据牛顿第二定律可得
(12)
式中:mL和mE分别为月面和地面条件下载人月球车单轮的等效载荷质量。
根据式(12),地面模拟月面的直线行驶加速度的目的就是令ia的取值为1。下面分两种情况讨论该比值,具体如下:
1)当地面采用的模拟车质量为月面载人月球车的1/6时,可获得相同的车轮垂直载荷。若采用相同车轮驱动扭矩,根据式(10)和式(11),可以获得相同的挂钩牵引力。根据以上关系,可得
(13)
将式(13)代入式(12),可得ia=1/6。可以看出,此时虽然可以获得相同的挂钩牵引力,但是由于质量的改变,并无法获得相同的直线行驶加速度。
2) 当质量相同时,由于地面重力约是月面的6倍,地面车轮垂直载荷是月面的6倍,此时若采用相同的车轮驱动扭矩,根据式(10)和式(11),获得的车轮挂钩牵引力不相等。根据以上关系,可得
(14)
将式(14)代入式(12),可得ia≠1。可以看出,当质量相同时,垂直载荷不同,相同驱动扭矩会产生不同的挂钩牵引力,导致无法获得相同的直线行驶加速度。
因此,针对以上两种情况,需要对车轮的驱动扭矩进行改变和控制,才能实现ia= 1的模拟。
3 单轮的月面运动模拟算法
本文不考虑车轮的电机模型和内部摩擦力矩等。定义uA为宇航员的直线驾驶输入,为了在地面条件下模拟月面的载人月球车直线加速特性,应该在不同重力条件下都使用相同的驾驶输入,以月面的车轮驱动力矩为模拟目标,则有:
uA=TL
(15)
对于月面条件下行驶的载人月球车,根据式(10),将式(15)作为输入,可得如下方程
(16)
在月面条件下,式(16)中,车轮的物理参数宽度b和半径r可较容易测得;对于车轮与土壤间的正压应力函数σ1L和σ2L、剪切应力函数τ1L和τ2L,其中的土壤参数可以通过标准的土壤压板实验获得;车轮的垂直载荷WL可根据载人月球车的整车质量、质心位置、月面重力加速度得到;车轮的驱动力矩TL,可根据式(15)的驾驶员输入获得。因此,式(16)只含两个未知变量sL和θ1L,将以上已知参数代入式(16)可得{sL,θ1L}。
将{sL,θ1L}代入如下方程
FDPL=
(17)
通过式(17)可求得FDPL的值。
在利用式(16)和式(17)的求解过程中可以看
出,在月面条件下,当驾驶员使用操纵杆做出uA的操纵输入时,相应的对车轮施加TL的驱动力矩,此时车轮在月壤上产生一定的沉陷量θ1L和滑转率sL,最终使车轮产生挂钩牵引力FDPL。
对于地面条件下行驶的模拟车,为了实现前进加速度的模拟,应有ia= 1。根据式(12),可得月-地条件下同直线加速度时的挂钩牵引力关系,如下所示:
(18)
将式(17)中FDPL的计算结果代入式(18),可获得地面条件下模拟时的车轮挂钩牵引力FDPE。利用地面条件下的车轮垂直载荷WE和挂钩牵引力FDPE,根据式(11),可得
(19)
与求解式(16)的过程类似,在地面条件下,车轮的物理参数b和r(月面和地面的车轮结构相同)、车轮与土壤间的正压力函数σ1E和σ2E、剪切应力函数τ1E和τ2E、车轮的垂直载荷WE,以上参数均可作为已知参数。另外,与式(16)求解过程不同的是,车轮的驱动力矩TE为后面所需求解的参数,而此时FDPE为利用式(18)获得的已知参数,同时该参数也是地面模拟时车轮需要产生的挂钩牵引力。因此,式(19)中同样只含有两个未知变量sE和θ1E,将以上已知参数代入式(19)可得{sE,θ1E}的值。
将{sE,θ1E}的值代入如下方程
(20)
通过计算,可获得模拟月面条件下车轮直线加速度时需要在地面条件下对车轮施加的驱动力矩TE。
从式(19)和式(20)的求解过程中可以看出,为了获得与月面相同的直线行驶加速度,需要产生满足式(18)关系的车轮挂钩牵引力FDPE。因此,式(19)和式(20)中对TE的求解,是基于式(16)和式(17)的求解结果FDPL所获得的。所以,对于宇航员来说,在地面条件下使用同样的操纵输入uA,通过求解式(15)~(20),可得地面模拟时所需使用的车轮驱动力矩TE。
因此,基于式(15)~(20)的求解过程可获得地面模拟月面单轮直线加速的模拟算法,其求解过程如图1所示。首先,驾驶员对车轮使用加速操纵输入uA,利用式(16)求得{sL,θ1L},将其代入式(17),计算获得FDPL的值。然后,将FDPL代入式(18),可以获得在地面模拟月面车轮的直线加速时,车轮所需产生的挂钩牵引力FDPE。最后,将FDPE代入式(19),求得{sE,θ1E},再将其代入式(20),通过计算可以得到地面模拟时所需的车轮驱动力矩TE。
4 模拟算法校验
从式(3)可以看出,车轮的输出力矩T需要大于压土力矩Tf时,才能产生挂钩牵引力FDP。因此,采用如下车轮的扭矩输入函数:
(21)
式中:Tmin是为了克服压土阻力所选取的最小车轮力矩,Tmax为最大车轮力矩。
在地面条件下,通常采用两种方式来模拟载人月球车的月面行驶,即相同质量和相同车轮载荷(1/6质量)。车轮的土壤参数如文献[16]所示,车轮r= 0.4 m,b= 0.23 m。
当月-地载人月球车具有相同质量,即mL= 174.75 kg,mE= 174.75 kg时,对以下三种情况的车轮驱动力矩T、挂钩牵引力FDP、直线加速度a进行计算和对比:1)月面条件下的单轮直线加速运动;2)地面条件下采用图1中模拟算法的单轮直线加速运动;3)地面条件下直接使用与月面相同车轮力矩的直线加速运动。当车轮最小力矩Tmin=20 N·m,车轮最大力矩分别为Tmax= 80 N·m和Tmax= 50 N·m时,计算结果分别如图2和图3所示。
图2和图3为采用等质量的模拟方法,此时只要产生相同的车轮挂钩牵引力即可产生相同的直线加速度。从图2(a)和图3(a)可以看出,此时由于地面的重力约是月面的6倍,车轮更大的垂直载荷需要使用更大的驱动扭矩才能获得相同的挂钩牵引力。从图2(b)和图3(b)可以看出,月面条件与地面模拟车轮的挂钩牵引力几乎完全重合,而地面非模拟情况中,车轮挂钩牵引力的理论值为负值,这说明此时采用与月面相同的车轮力矩时,由于力矩较小而无法克服土壤的压土力矩,因此无法产生净挂钩牵引力。相应地,从图2(c)和图3(c)可以看出,月面条件与地面模拟的单轮直线加速度几乎完全相同,而地面非模拟情况下,由于不能产生前进挂钩牵引力,单轮并不能产生直线运动,即直线加速度为0。
当月-地载人月球车采用同垂直载荷模拟(1/6质量)时,mL=174.75 kg,mE=29.13 kg。同样对上述三种情况车轮的驱动力矩T、挂钩牵引力FDP、直线加速度a进行计算和对比。当车轮最小力矩Tmin=20 N·m,车轮最大力矩分别为Tmax=80 N·m和Tmax=50 N·m时,计算结果分别如图4和图5所示。图4和图5为相等车轮垂直载荷的模拟方法,这种方法也是地面条件下最常使用的。从图4(a)和图5(a)可以看出,此时由于较小的质量,为了产生相同的直线加速度时,地面模拟时仅需要较小的车轮力矩。
从图4(b)和图5(b)可以看出,采用地面模拟的车轮等效载荷质量是月面的1/6,因此地面模拟时的挂钩牵引力是月面的1/6就可以产生相同的直线加速度。地面非模拟时,由于地面车轮垂直载荷和驱动力矩均与月面相同,能够产生相同的挂钩牵引力。从图4(c)和图5(c)可以看出,月面条件与采用模拟方法的地面条件的车轮可产生相同的直线加速度,而地面非模拟的车轮产生了月面条件约6倍的车轮直线加速度。
因此,根据图2~5的计算结果,不采用模拟方法时的地面车轮,由于月-地重力加速度的不同,与月面条件下的直线加速度具有较大的差异。而采用模拟算法驱动的车轮在地面条件下进行直线运动时,可产生与月面车轮相同的直线加速度。
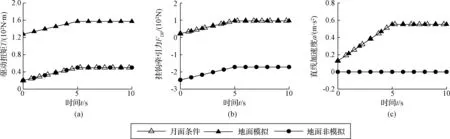
图2 单轮月面直线加速模拟的对比(同质量模拟,Tmax=80 N·m)Fig. 2 Comparison of wheel linear acceleration (imitation with same mass, Tmax=80 N·m)
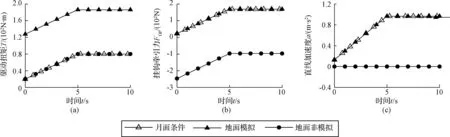
图3 单轮月面直线加速模拟的对比(同质量模拟,Tmax=50 N·m)Fig. 3 Comparison of wheel linear acceleration (imitation with same mass, Tmax=50 N·m)
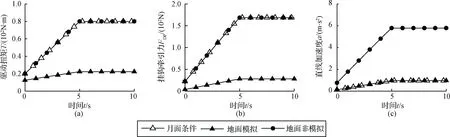
图4 单轮月面直线加速模拟的对比(同垂直载荷模拟,Tmax = 80 N·m)Fig.4 Comparison of wheel linear acceleration (imitation with same vertical load, Tmax = 80 N·m)
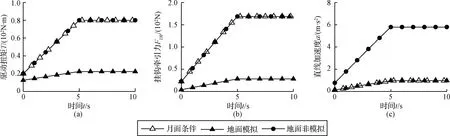
图5 单轮月面直线加速模拟的对比(同垂直载荷模拟,Tmax = 50 N·m)Fig.5 Comparison of wheel linear acceleration (imitation with same vertical load, Tmax = 50 N·m)
5 结 论
基于车轮的地面力学模型,分析了月-地不同重力条件下单个车轮能够产生相同直线加速度的运动条件,推导了相应的模拟算法。通过计算和分析,得到了如下结论:
1) 当月-地车轮具有相同等效质量时,采用模拟算法驱动地面车轮,在月面分别使用最大50 N·m和80 N·m的力矩驱动时,地面分别采用157.3 N·m和186.2 N·m力矩驱动的车轮可获得与月面车轮相同的挂钩牵引力,并获得相同的直线加速度。
2) 当月-地车轮具有相同垂直载荷时,采用模拟算法驱动地面车轮,在月面分别使用最大50 N·m和80 N·m的力矩驱动时,地面分别采用最大17.5 N·m和22.3 N·m力矩驱动的车轮可获得月面车轮1/6的挂钩牵引力,并获得相同的直线运动加速度。
[1] Zhang T, Zhao Z, Liu S T, et al. Design and experimental performance verification of a thermal property test-bed for lunar drilling exploration[J]. Chinese Journal of Aeronautics, 2016, 29(5): 1455-1468.
[2] Kwon J W, Lee D, Bang H. Virtual trajectory augmented landing control based on dual quaternion for lunar lander[J]. Journal of Guidance Control and Dynamics, 2016, 39(9): 2044-2057.
[3] Saheba S M, Upadhyaya T K, Sharma R K. Lunar surface crater topology generation using adaptive edge detection algorithm[J]. IET Image Processing, 2016, 10(9): 657-661.
[4] 刘磊, 唐歌实, 胡松杰, 等. 月球探测再入返回试验后续飞行方案研究[J]. 宇航学报, 2015, 36(1): 9-17. [Liu Lei, Tang Ge-shi, Hu Song-jie, et al. Follow-up flight scheme for the reentry test of China lunar exploration[J]. Journal of Astronautics, 2015, 36(1): 9-17.]
[5] 宋叶志, 黄勇, 胡小工, 等. 月球探测软着陆与采样返回段弹道确定[J]. 宇航学报, 2016, 37(10): 1157-1163. [Song Ye-zhi, Huang Yong, Hu Xiao-gong, et al. Trajectory determination for lunar probe soft landing and sampling return[J]. Journal of Astronautics, 2016, 37(10): 1157-1163.]
[6] 于登云, 葛之江, 王乃东, 等. 月球基地结构形式设想[J]. 宇航学报, 2012, 33(12): 1840-1844. [Yu Deng-yun, Ge Zhi-jiang, Wang Nai-dong, et al. Supposal for structure form of lunar base[J]. Journal of Astronautics, 2012, 33(12):1840-1844.]
[7] 梁忠超, 高海波, 闫冰, 等. 载人月球车等效侧倾刚度和阻尼计算方法[J]. 机械工程学报, 2015, 51(5): 1-13. [Liang Zhong-chao, Gao Hai-bo, Yan Bing, et al. Calculation approach of the equivalent roll stiffness and damping of the lunar roving vehicle[J]. Journal of Mechanical Engineering, 2015, 51(5): 1-13.]
[8] 肖万伸, 张岩. 载人月球车车轮设计及基于弹性车轮轮壤相互作用的力学模型研究. 机械工程学报, 2016, 52(10): 119-125. [Xiao Wan-shen, Zhang Yan. Design of wheel of manned lunar rover and research on terramechanics model for wheel-terrain interaction based on elastic wheel[J]. Journal of Mechanical Engineering, 2016, 52(10): 119-125.]
[9] 刘志全, 王丽丽, 吴伟仁, 等. 月球钻取采样钻头结构参数对力学性能的影响[J]. 宇航学报, 2015, 36(12): 1339-1347. [Liu Zhi-quan, Wang Li-li, Wu Wei-ren, et al. Effect of structure parameters of drill bit on mechanical performances of lunar automatic drill sampling mechanism[J]. Journal of Astronautics, 2015, 36(12): 1339-1347.]
[10] Volpe R. Navigation results from desert field tests of the rocky 7 Mars rover prototype[J]. International Journal of Robotics Research, 1999, 18(7): 669-683.
[11] Paulnock R S. First interim report: preliminary design study of a lunar gravity simulator[R]. USA: Lock Heed Missile & Space Company, 1966: 1-15.
[12] Paulnock R S. Second interim report: preliminary design study of a lunar gravity simulator[R]. USA: Lock Heed Missile & Space Company, 1966: 1-15.
[13] Paulnock R S. Third interim report: preliminary design study of a lunar gravity simulator[R]. USA: Lock Heed Missile & Space Company, 1966: 1-9.
[14] Shibly H, Iagnemma K, Dubowsky S. An equivalent soil mechanics formulation for rigid wheels in deformable terrain,with application to planetary exploration rovers[J]. Journal of Terramechanics, 2005, (42): 1-13.
[15] Wong J Y, Reece A R. Prediction of rigid wheel performance based on analysis of soil-wheel stresses,part I:performance of driven rigid wheels[J]. Journal of Trramechanics, 1967, 4(1): 81-98.
[16] Liang Z C, Gao H B, Ding L, et al. Analysis of driving efficiency for LRV wheels using forced-slip method [J]. Advances in Space Research, 2014, 54(10): 2122-2130.
[17] Liang Z C, Wang Y F, Chen G, et al. A mechanical model for deformable and mesh pattern wheel of lunar roving vehicle[J]. Advances in Space Research, 2015, 56(12): 2515-2526.
通信地址:辽宁省沈阳市和平区文化路3巷11号东北大学319信箱(110819)
电话:18640288613
E-mail: liangzc@me.neu.edu.com
王永富(1969-),男,博士,教授,主要从事电动汽车控制,模糊控制方面的研究。本文通信作者。
通信地址:辽宁省沈阳市和平区文化路3巷11号东北大学319信箱(110819)
E-mail: liangfifa@163.com
Imitation Algorithm of Single Wheel Linear Accelerating on Moon for Manned Lunar Rover
LIANG Zhong-chao1, WANG Yong-fu1, JIN Ma2, GAO Hai-bo2, DENG Zong-quan2
(1. School of Mechanical Engineering and Automation, Northeastern University, Shenyang 110819, China; 2. State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150080, China)
When the wheels of a manned lunar roving vehicle (LRV) are driven by the same torque both on the Earth and the Moon, the vehicle will produce the different linear acceleration caused by the different gravities. In view of the above questions, a single wheel is concentrated, and the force model of the vertical load, drawbar pull force, and driving torque is established. Then, by analyzing the moving condition of producing the same linear acceleration for a single wheel both on Earth and the Moon, the imitation algorithm for driving the wheel is derived. Finally, to verify the imitation algorithm, the linear accelerations of a single wheel under three conditions, including the lunar condition, the Earth condition with the imitation algorithm, and the Earth condition without the imitation algorithm, are compared. The comparison results show that the wheel on Earth driven by the torque using the imitation algorithm can produce the same linear acceleration with that of the wheel on the Moon. However, the wheel without using imitation algorithm cannot produce the same linear acceleration.
Manned lunar rover; Terramechanics; Linear accelerating; Imitation algorithm
2017-02-04;
2017-05-11
国家自然科学基金(51605082);机器人技术与系统国家重点实验室开放基金(SKLRS-2017-KF-07);辽宁省博士科研启动基金(201601006);沈阳市科技基金(F16-226-6-00)
TP242
A
1000-1328(2017)07-0772-07
10.3873/j.issn.1000-1328.2017.07.000
梁忠超(1984-),男,博士,讲师,主要从事轮式移动机器人,月球车,电动汽车控制等方面研究。
