基于电感感测的自动循迹小车的设计∗
2017-08-01马贝田瑞明周野王芸
马贝 田瑞明 周野 王芸
(西安工业大学电子信息工程学院西安710021)
基于电感感测的自动循迹小车的设计∗
马贝 田瑞明 周野 王芸
(西安工业大学电子信息工程学院西安710021)
介绍了采用电感感测路径的自动循迹小车控制系统。自动寻迹小车控制系统以STC12C5A60S2为核心控制单元,采用LDC1000电感数字转换器完成道路检测,采用两个步进电机完成小车驱动。道路检测算法,采用基于滑窗滤波算法的扇形扫描法判断小车的偏移方向。搭建实验平台,小车能够完成自动偱迹功能,达到第五届TI杯电子设计大赛要求,该系统设计可为相关的货运机器人等提供了参考。
STC12C5A60S2;AY-LDC1000;步进电机;循迹
Class NumberTP249
1 引言
自循迹小车控制系统,也是最简单的车式自动化控制设备,适合在一些特殊环境中工作。因其成本低廉,目前已在工业生产中逐步取代人的劳动,促进生产力的发展。例如在高温高压环境、有毒有害气体环境以及航空航天活动都有机器人的应用,所有这些应用正逐步渗入到工业生产和我们日常生活的各个层面。智能小车是一个集环境感知、规划决策、自动行驶等功能于一体的综合系统,它集中地运用了计算机、传感、信息、通讯及自动控制等技术,是典型的高新技术综合体[1~2]。此设计采用电感式数字金属探测传感器,作为货运机器人前进路径检测装置,可以实现偱迹小车在无外界因素的参与下的自主前进,自主判断到达预定的站点进行靠站停车。
2 机械结构
车体采用两前轮驱动,三轮方式循迹。车架为高强度铝合金,保证了车体结构的稳定性;前轮采用两个42步进电机做驱动轮,其转动力矩大、体积小、质量轻,具有良好的控制性能;后轮采用万向轮,起支撑与辅助转弯作用。这种机械结构可以让偱迹小车转向更灵活。传感器线圈安装于车体正前方贴近地面0.5cm处,这样设计保证了传感器的灵敏度。机械结构如图1所示。
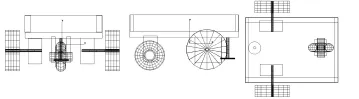
图1机械结构三视图
3 系统设计
偱迹小车由单片机、电源模块、检测模块、电机驱动模块、声光报警模块,显示模块组成,其系统结构如图2所示[3]。

图2系统结构
3.1 控制模块
经过多方比较,本偱迹小车最终选择STC公司生产的STC12C5A60S2单片机作为核心控制芯片,其成本低廉,运行速度快,低功耗,抗干扰能力强,正好可以满足设计要求。
3.2 电源模块
电源模块用于为系统中各个部分提供稳定可靠的电压,是一个设计中关键的部分。各个模块要想正常工作都需要提供合适的电源。本系统采用12V锂电池作为电源。电机驱动模块由锂电池直接供电;控制模块、LDC1000传感器及报警模块的电源由LM2576芯片降压稳压后提供,以满足系统中不同的电压要求。
3.3 检测模块
LDC1000是一款电感到数字转换器,提供低功耗、小封装、低成本的解决方案。LDC1000只需外接一个PCB线圈或自制线圈就可实现非接触式电感检测。LDC1000电感检测并不是指像Q表那样测试线圈的电感量,而是可以测试外部金属物体和LDC1000相连的测试线圈的空间位置关系[4]。LDC1000利用电磁感应原理,当有金属物体处于其PCB线圈下方时,传感器内部会产生涡流,涡流的大小与金属物品的大小、成分和金属物品到线圈的距离有关。在实际应用中,可以根据传感器的检测值与设定值的大小关系,完成相关操作[5]。
根据以上特性,在设计本系统时利用LDC1000作为循迹检测装置,检测地面铺设的金属导轨,引导偱迹小车运动。LDC1000与MCU的连接采用四线制SPI连接方式,通过SPI串行总线实现对LDC1000的控制,完成时序定义和数据读取[6]。降低了系统的复杂度,为后续系统的升级提供了有利条件。如图3所示。

图3LDC1000与MCU连接图
为了保证LDC1000稳定工作,必须为其提供可靠的频率计数时钟频率,在设计本系统时采用8M有源晶振作为其时钟源,采用非门提高时钟模块的驱动能力[7]。具体电路如图4所示。
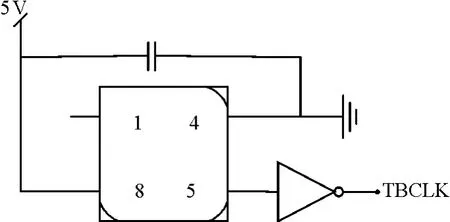
图4有源晶振连接图
3.4 电机驱动模块
为达到系统控制要求,本系统采用基于PWM恒流控制微步距技术的专用驱动芯片TB6560AHQ作为步进电机的驱动芯片。其具有低能耗、高集成等优点,特别适合两相混合式步进电机使用。配合简单的外围电路,可以实现整步、1/2细分、1/8细分、1/16细分方式;内置温度保护,芯片温度大于150℃时自动断开所有输出;具有过流保护;采用HZIP25封装[8],从而达到高性能控制要求。MCU与TB6560模块连接图如图5。
3.5 报警模块
发光器件选择发光二极管,发声器件选择蜂鸣器,当传感器检测到导轨后,发光二极管点亮,偱迹小车正常行进;当传感器检测到特殊金属物体时,偱迹小车到达目的地,停止前进并产生声音提示。
3.6 显示模块
显示模块采用Nokia5110液晶屏,通过串行接口与主处理器进行通信。实时显示运行过程中信号的强度信息和距离信息,能较大程度上帮助系统判断运行故障。

图5MCU与TB6560模块连接图
3.7 抗干扰设计
由于LDC1000在实际工作中很容易受到电磁干扰,从而导致检测的数据失准,导致偱迹小车无法正常工作。故在设计硬件时,采用屏蔽线连接MCU与LDC1000,采用屏蔽罩对产生较大电磁干扰的步进电机进行屏蔽。使电磁干扰对系统的影响降到最低[9]。
4 软件设计
系统启动后,模块进行初始化,探测模块开始扫描检测地面金属导轨,在读取LDC1000测量值时,首先唤醒LDC1000,读取接近数据低8位值,再次唤醒LDC1000读取接近数据高8位值,最后在唤醒LDC1000情况下,将接近数据低8位与接近数据高8位组成16位数据作为本次检测值,结束后进行下次测量。LDC1000扇形检测扫描流程图如图6所示[10]。CPU通过串口接收到LDC1000发送的数据后,在对检测数据处理时,采用算术平均值滑动滤波算法,即在RAM缓冲区内建立一个数据缓冲区,依顺序存放N个采样数据,每采集一个新数据,就将之前采集数据丢掉,而后求包括新数据在内的N个数据的算术平均值。将此算术平均值作为检测值与设计值进行比较[11]。排除偶然因素影响,极大提高了检测数据的准确性。检测值与设定值进行比较,将路径信息进行处理,向电机驱动模块发送PWM信号,进而控制智能体运动,从而实现相应功能。检测值大于站点阈值时,偱迹小车暂停一段时间,开始执行下一次任务;当检测值大于轨道阈值且小于站点阈值时,小车直行;当检测值小于导轨阈值时,小车首先左转,然后再次扫描,如果此次检测值大于轨道阈值则继续直行;如果此次检测值小于轨道阈值时,偱迹小车右转后开始新一轮的扫描。系统整体流程图如图7所示[10]。

图6LDC1000检测流程图

图7系统整体流程图
5 系统测试
金属物体探测信号采集模块信号采集与处理:探测器需采用TI公司LDC1000电感/数字转换器作为金属物体探头。探测器PCB线圈与地面保持平行,距离为5mm。分别对探测器置于金属丝的内外不同位置进行测量,得到数据如表1。
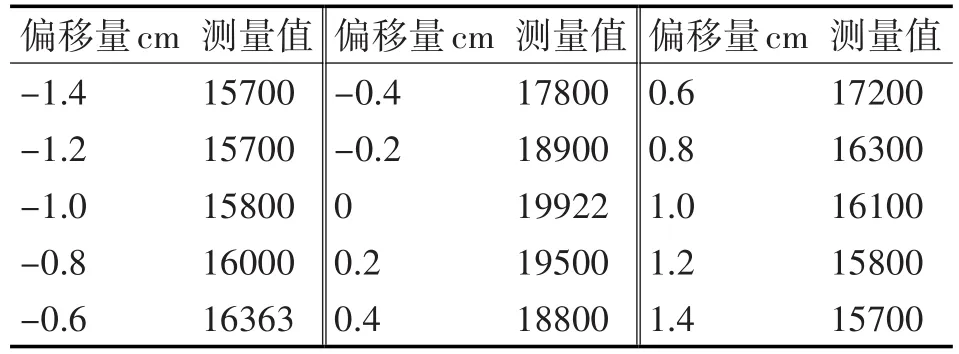
表1 偏移量与传感器测量值关系
根据表1中数据绘制出趋势图,如图8所示。
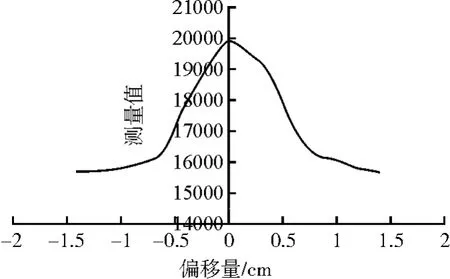
图8不同探测位置与电感值变化趋势
根据数据分析可知:当传感器正对金属导轨时,此时测量值最大为19922,随着传感器偏移金属导轨的距离增大,测量值在不断的减小。当左右偏移距离小于0.6cm时,随着偏移距离的变化,测量值变化明显;当偏移距离大于0.6cm时,随着偏移距离的测量值变化趋势缓和。根据此测量结果,在设计系统时,以偏移导轨0.4cm时的测量值作为本系统的控制阈值,可以使偱迹小车精准地沿着导轨运行,且具有较高的运行速度。当传感器检测到的值大于28000时,可认为到达预定的站点,小车可以实现准确停靠。

图8小车实物图
小车的实物图如图7所示,按照第五届TI杯电子设计大赛要求,小车可完成直线和弯道的寻迹功能,同时具备硬币提示和自动停车功能,完成给定寻迹路线,时间可达到30s。最终通过比赛,获取陕西赛区一等奖。
6 结语
自动寻迹小车采用TI公司的LDC1000电感数字转换器作为道路检测器件,STC12C54A60S2单片机控制单元,通过合理的系统构建和软件编程,能够完成设计要求,实现金属探测、报警、小车自动循迹、停靠等功能,可为实现货运机器人,智能小车运动等提供技术基础支撑。
[1]李波,杨卫,张文栋.一种智能小车自主寻/偱迹系统设计[J].计算机测量与控制,2012(10):2789-2801. LI Bo,YANG Wei,ZHANG Wendong.A kind of intelli⁃ gent vehicle autonomous navigation system design/trace Xun[J].computer measurement and control,2012(10):2789-2801.
[2]陈凤东,洪炳熔.基于特征地图的移动机器人全局定位与自主泊位方法[J].电子学报,2010,38(6):1256-1261. CHEN Fengdong,HONG Bingrong.Mobile robot global lo⁃calization feature map and self docking method based on[J].Journal of electronics,2010,38(6):1256-1261.
[3]李少华,白红燕.涡流法电阻率测试仪的设计[J].国外电子测量技术,2013,32(7):62-65. LI Shaohua,BAI Hongyan.Design of resistivity measuring instrument by eddy current method[J].foreign electronic measurement technology,2013,32(7):62-65.
[4]德州仪器(TI)公司.AY-LDC1000数据手册[EB/OL]. http://www.ti.com.cn,2013. Texas Instruments(TI).AY-LCD1000 data sheet[EB/OL]. http://www.ti.com.cn,2013.
[5]符磊,林君,王言章,等.磁通负反馈空心线圈传感器特性和噪声研究[J].仪器仪表学报,2013,34(6):1312-1318. FU Lei,LIN Jun,WANG Yanzhang,et al.Study on the characteristics and noise of the hollow coil sensor with neg⁃ative feedback magnetic flux[J].Journal of the instrument and meter,2013,34(6):1312-1318.
[6]周立功.ARM嵌入式系统基础教程[M].北京:北京航空航天大学出版社,2008:237-238. ZHOU Ligong.ARM embedded system based tutorial[M].Beijing:Beijing university of aeronautics and astro⁃nautics press,2008:237-238.
[7]阎石.数字电子电路[M].北京:中央广播电视大学出版社,1993:45-83. YAN Shi.Digital electronic circuits[M].Beijing:The cen⁃tral radio and television university press,1993:45-83.
[8]东芝.TB6560AHQ/二自由度陀螺仪,PWM Chop⁃per-Type双相步进电机驱动器集成电路,2006:2-8. Toshiba.TB6560AHQ/AFG,PWM Chopper-Type bipolar Stepping Motor Driver IC,2006:2-8.
[9]周国清.电子设备中基于接地与屏蔽的电磁兼容性设计[J].西南大学学报(自然科学版),2014(8):185-188. ZHOU Guoqing.Electronic devices based on grounding and shielding of electromagnetic compatibility design[J]. Journal of Southwest University(Natural Science Edi⁃tion),2014(8):185-188.
[10]郭天祥.新概念51单片机C语言教程:入门、提高、开发、拓展全攻略[M].北京:电子工业出版社,2009:42-56. GUO Tianxiang.New concept 51 MCU C language tutori⁃al:entry,improve,develop,expand the Raiders[M]. Beijing:Electronics Industry Press,2009:42-56.
Design of Freight Robot Based on LDC1000 Sensor
MA BeiTIAN RuimingZHOU YeWANG Yun
(College of Electronic Information Engineering,Xi'an Technological University,Xi'an710021)
This paper introduces the design of automatic vehicle tracking control system based on LDC1000.Road detection module uses TI's LDC1000 digital inductance converter,tracking wire to be detected.Automatic tracking trolley driven by stepping motor,the controller uses STC12C5A60S2.In the detection process,the road information detected by LDC1000 using sector scan method to determine the travel direction of the trolley,and control the tracking trolley by two stepper motor in motion.By building the experimental platform,the trolley can better complete automatic followed trace function,and provide a reference for related freight robot.
STC12C5A60S2,AY-LDC1000,stepper motor,tracking
TP249
10.3969/j.issn.1672-9722.2017.07.040
2017年1月9日,
2017年2月24日
国家自然科学基金面上项目(编号:61271362)资助。
马贝,男,硕士研究生,助理工程师,研究方向:智能控制、计算机控制,光学工程。田瑞明,男,研究方向:自动化。周野,男,研究方向:自动化。王芸,女,研究方向:自动化。