一种基于无线自组网的内河航标装置设计
2017-06-23袁学松
袁学松,张 静
(安徽机电职业技术学院 信息工程系,安徽 芜湖 241000)
一种基于无线自组网的内河航标装置设计
袁学松,张 静
(安徽机电职业技术学院 信息工程系,安徽 芜湖 241000)
在内河航道中航标起着保证航道和船舶安全的作用。由于气候和水文的变化航标容易出现偏移等现象,导致无法正确标记航道位置,如果航标维护人员不及时进行纠正,会影响内河航道船舶的航行安全。设计了一种基于无线自组网的内河航标装置,该装置具有防偏移和防碰撞取证等装置。航标间使用无线自组网进行数据通信,并可通过各种通信方案来及时上报相关故障。
内河航道;无线自组网;内河航标
引言
随着无线自组网(AD-HOC)[1]广泛的使用,很多行业都利用其无中心、自组织性和造价低廉等特点设计了很多具有无线通信功能的新装置。如:在陆上VANET[2-3]技术的产品已经被广泛应用与车联网中,无线内河航道通信的设备还是较少,大多数使用高频和甚高频(VHF)[4]进行通信,一些航标主要起指示航道的作用基本不具备采集信息和通信的功能。本文设计了一种基于无线自组网的内河航标装置,该装置包括:北斗定位短消息发送装置,基于多种传感器的航行参数测量装置,各类本体检测与报警装置。
1 无线自组网航标设计
基于无线自组网的内河航标装置设计要点主要有:(1)内河航道与航标间进行无线自组网方式组网,并进行相关的数据通信,以达到防止船舶间、船舶与航标碰撞的目的。(2)北斗定位于短消息发送装置,主要帮助航标进行精确定位,并和张力传感器共同监测航标是否发生了漂移。同时,通过短消息模块对漂移的航标进行报警,当航标体自身的各类设备工作状态出现了故障,也可以通过其进行监测和报警。(3)当航标体通过传感器感知距离过近时,发出声光报警,并通过无线自组网警告逼近船舶,同时开启具有夜视功能的高清摄像头进行相关取证,并通过3G/4G模块进行发送。
1.1 防航标漂移装置设计方案
图1为简易的内河航标防漂移装置结构图。1为船体或者鼓式航标剖面图。船体随水流正常的倾斜和偏移是不会报警的。只有在偏移过大,经过各种检测(如北斗模块定位检测)后,发现确实异常才进行报警。2为特殊材料管状锚链,中空。该锚链具有抗拉,防腐蚀,密封性好等特性。3为各类传感装置,这些传感装置有:①张力、压力传感器,传感器采用筒式、柱式结构形式。内外螺纹作承载连接,具有抗偏、抗侧能力、精度高、性能稳定性强等特点。用于测量锚链的拉伸力和压缩力,并可以以数字的形式传输给航标体内的单片机。根据不同的航标体使用不同拉伸力的传感器,一般使用100T的足够。②涡轮流量计智能传感器,该传感器主要用于测量航标当前的水流速,提供给航标体内的单片机,这些信息会在自组网中传输给相应的船舶节点。③超声波测水深传感器,该传感器使用超声波方式测量水深,通过路由协议发送给船舶节点,防止大型船舶在浅滩搁浅。4为配重体, 使航标体能在较大风速和水流作用下保持稳定的漂浮状态。5为普通航标锚链,起到固定作用。6为水泥墩及其锚链,该装置可以使5与水平角呈60°~75°以保持航标体的稳定性。7为锚,是航标的固定装置。
水泥墩锚链断裂、航标锚链断裂或者锚脱离都会导致航标体的漂离。张力、压力传感器会第一时间了解到异常的张力(超过了设定的范围),该传感器会将信息传递给船体中的单片机,单片机根据自身北斗模块的定位功能判断自身位置(经度和纬度)是否发生偏移,若偏移不在一个合理的范围内,则通过3G/4G模块给航标检修人员进行报警,同时通过北斗短消息发送模块将信息传输给航道管理局的服务器中。

图1 内河航标防漂移装置结构图
1.2 航标体结构
图2为航标体的剖面图,图中1为环形多晶太阳能电池板。该电池板为船体的各类传感器和处理器提供供电支持。2为航标核心处理装置。3为风速传感器和相关天线装置。同时具有一套声光报警装置和夜视高清摄像头。4为蓄电池为航标装置提供能源保障。

图2 航标体结构剖面图
1.3 航标工作流程
航标装置工作流程图如图3所示,太阳能供电模块和蓄电池组给整个装置提供电源,当前小型灯塔已采用太阳能电池,航标作为一个耗电不大的装置,较大功率的太阳能蓄电池组已完全能满足其需求。航标单片机处理器模块使用的是STM32F103,改处理器基于32位ARM核心的带128K字节闪存的微控制器。能完成基本的传感器数据搜集处理和相关通信工作。通信模块包括3种通信方式。各类传感器将检测到的实时信息通过相关通信模块传输至临近航标或者航道管理局的服务器上。
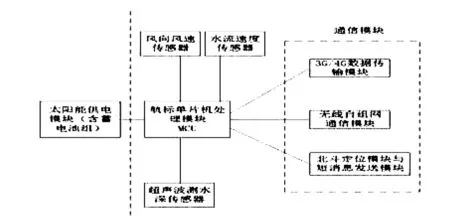
图3 航标装置工作流程图
1.4 航标节点无线自组网通信方案
航标间通信通过无线自组网完成,整个通信模式如下所示。
① 航标节点周期性的向周围具有无线自组网通信装置的船舶节点进行信标消息广播。广播的内容包括由航标传感器得到的水流速度方向、风速及方向、水深信息等相关航行信息。信标数据包格式如下。

图4 信标数据包格式
水流速度与方向、风速与方向、水深信息都是有航标节点的相关传感器得到的数据,然后通过MCU处理后通过无线自组网通信模式传输给通信范围内的所有船舶节点。
② 船舶节点在收到周期新的广播信息后,比较自身北斗定位装置得到的信息,算出于航标节点间的距离,然后通过相关算法计算出自己的运动趋势,判断是否会与航标节点进行碰撞,并及时做出修正。
③ 同样船舶节点间也通过相关算法来避免碰撞的发生。
④ 航标节点周期性的自检,检查自己的相关传感器是否正常工作,如果不正常工作则会通过相关3G/4G通信方式或者北斗短消息传送机制将故障信息发送到相关的服务器和维修人员的移动客户端上。同时,在周期性的广播中,如果航标节点的健康标识为false则表示节点失效,船舶节点不考虑此条信息,将从其他航标节点中获取相关信息。
⑤ 节点间的通信算法使用GPSR-CH算法,[5]该算法主要是对内河航道中船舶和相关航标进行通信设计的,较为可靠。
1.5 装置的通信模块设计
装置的通信模块主要包括:3G/4G模块、自组网通信模块、北斗定位短消息发送模块。其中,自组网通信模块为船舶节点间、航标节点间以及两者间相互通信的主要方式。这种通过相关路由协议的通信有效的保障了航行的安全。航标节点与船舶节点进行通信时,相关路由协议会收集航标上各类传感器的数据经单片机处理后通过天线进行传输。3G/4G模块为航标定期检测(自身)状态后发送给相关航道管理部门的通信模式。当某些传感器失灵,航标锚链断裂导致的航标漂移等故障产生后,通过该模块的通信进行数据的发送。在某些特殊航道,3G/4G信号覆盖不到的地方,可以启动北斗短报文传送装置进行数据传输。
1.6 防碰撞取证装置设计
在本装置上具有一个高清夜视摄像头和一套声光电报警装置。当该装置经无线自组网相关路由协议判断船舶位置小于安全距离,且有碰撞趋势的时候,会启动防碰撞机制。该机制会通过北斗定位模块获取航标的具体位置,并通过路由协议交换到相关船舶的地理位置。若判断小于100米,立即启动声光报警装置,同时开启高清摄像头对船舶进行航行取证,将取证的信息通过3G4G模块传输给河道管理局的服务器平台。
小结
文中采用单片机与 各类传感器模块相结合设计的航标装置设备已在某些水域航道得到小范围的试用,实际运行使用中,该装置工作稳定可靠。同时,该装置可以在所有浮鼓式或船式航标上进行安装,对航标的结构形态改变较小,不会影响航标的浮态,适合在内河航道上进行推广。
[1]郑少仁,王海涛,等. Ad Hoc 网络技术[M].人民邮电出版社,2005(1):11-25.
[2]Liu Haiqing,Yang Licai,Ding Sijing,et al.LogicalconnectivitypredictionmodelsforVANETbasedonnonlinearregressionandELM:AnexampleoftheAODVprotocol[J].International Journal of Future Generation Communication and Networking,2014,17(6):217- 230.
[3]Karp for B, Kung H T.GPSR:Greedyperimeterstatelessroutingwirelessnetworks[C]/ACM/IEEE International Conference on Mobile Computing and Networking, Boston Massachusetts USA, 2000:243-254.
[4]赵立凯.VHF/UHF频段宽带天线的研究与设计[D].兰州大学,2012:1-11.
[5]袁学松,袁涛,王蒙,张静.一种可靠的GPSR改进算法在内河航道中的应用研究[J].安庆师范学院学报(自然科学版),2016,22(2):72-76.
Class No.:TP872 Document Mark:A
(责任编辑:蔡雪岚)
A Navigation Mark Device Based on Wireless Ad Hoc Networks
Yuan Xuesong,Zhang Jing
(Department of Information Engineering, Anhui Technical College of Mechanical and Electrical Engineering, Wuhu, Anhui 241000,China)
In the inland waterway, navigation plays the role of ensuring the safety of waterways and ships. Due to climate and hydrological changes, the buoy prone to deviate the correct position . If it had not been corrected timely, the safety of ships in the inland waterway would have affected. This paper describes the design of a wireless ad hoc network based on inland navigation marks, the navigation with anti-migration and anti-collision forensics device. With the wireless ad hoc network data communication and various communication schemes ,the relative fault information would feedback to us timely.
wireless ad hoc network; inland waterways; inland river navigation mark
袁学松, 硕士,讲师,安徽机电职业技术学院信息工程系。研究方向:网络仿真技术、无线传感网、数据挖掘、图像处理技术。 张静,助理实验师,安徽机电职业技术学院信息工程系。研究方向:高校实验室建设,网络设计等。
2017年度安徽高校重点自然科学研究项目“基于SAR的长江流域排污检测系统设计与研究” (项目编号:KJ2017A757); 2016年安徽机电职业技术学院院级重点研究项目“多场景Vanet广播路由研究”(项目编号:2016zdzr10)。
1672-6758(2017)06-0051-3
TP872
A
