通过全球专利分析看深空探测自主导航与控制技术发展
2017-06-10梁洪峰褚鹏蛟王永芳茹阿昌王振华
梁洪峰,褚鹏蛟,王永芳,茹阿昌,王振华
(1.中国航天系统科学与工程研究院,北京100048;2.北京控制工程研究所,北京100080)
通过全球专利分析看深空探测自主导航与控制技术发展
梁洪峰1,褚鹏蛟1,王永芳1,茹阿昌1,王振华2
(1.中国航天系统科学与工程研究院,北京100048;2.北京控制工程研究所,北京100080)
深空探测作为人类航天活动的重要方向,是人类探索宇宙奥秘和寻求长久发展的必然途径,也是衡量一个国家综合国力和科学技术发展水平的重要标志。作为深空探测中的一类重要技术,自主导航与控制技术越来越多地受到关注并得到应用,成为各国深空探测技术研究和发展的热点之一。以深空探测自主导航与控制技术为对象,通过专利检索分析,研究国内外发展现状,试图获得技术趋势。
深空探测;自主导航;传感器;控制技术;专利分析
0 引言
深空探测中的自主导航与控制技术在20世纪60年代就引起了重视,随着科学技术的进步以及导航计算能力和传感器性能的不断提高,深空探测自主导航与控制技术越来越多地受到关注并得到应用,成为各国深空探测技术研究和发展的热点之一[1]。
在全球高新技术爆炸式发展、专利申请激增的形势下,挖掘利用海量专利信息成为掌握技术发展动态、洞察技术发展方向和促进技术进步的重要手段。专利分析研究已成为解决科研实际问题、提高技术创新起点、突破关键技术难题的重要方法[2]。为此,利用汤森路透公司的Thomson Innovation数据库,以自主导航与控制技术专利发展动态为主线,以自主导航与控制技术相关关键词和分类号及相关专利进行全面检索、深度分析研究,提出问题和看法,以供商榷。
1 专利态势分析
本文采用德温特世界专利索引数据库(Derwent World Patents Index,简称德温特数据库或DWPI)进行专利检索,检索截止时间为2016年5月4日,共获得相关专利文献1460项。
1.1 技术构成分析
自主导航与控制技术可分为传感器和导航与控制算法2个主要技术分支,其中传感器分支专利文献数量较多,与导航与控制算法专利文献数量的比例约为5∶2。各分支具体专利文献数量如图1所示。
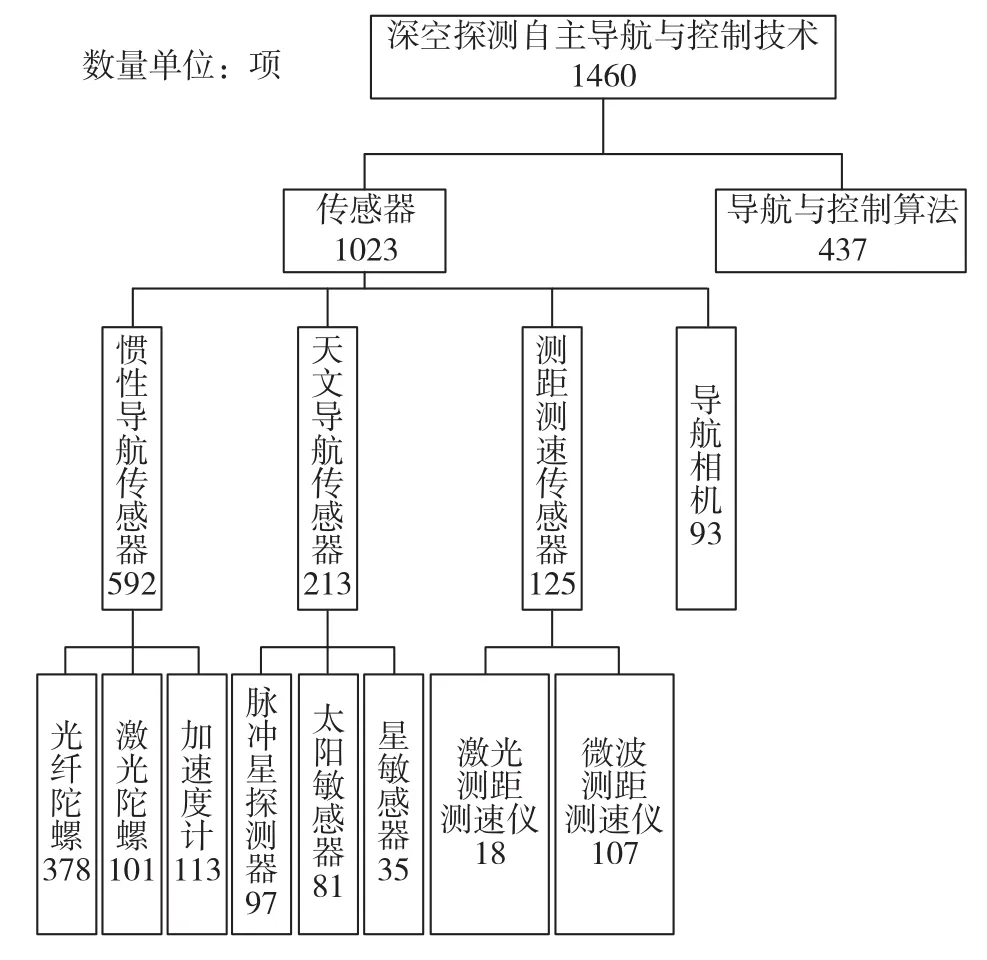
图1 自主导航与控制技术构成图Fig.1 Composition of autonomous navigation and control technology
1.2 专利申请年度变化及主要国家技术分布分析
从图2可以看出,传感器分支专利、导航与控制算法专利从20世纪80年代开始逐年增长。2004年~2005年间,虽然申请量没有明显增长,但在惯性导航传感器和天文导航传感器方面产生了几件重要专利,如波音公司的无磁加速度计、霍尼韦尔光纤陀螺掉电或机械故障数据恢复以及波音公司的星敏感器实时校准等,带动了其后的申请热潮,于2012年达到峰值。而导航与控制算法分支虽然也是从20世纪80年代开始逐年增长,但增长的启动时间略晚于传感器[3],其峰值是出现在1995年,其后申请量一直在十几件至二十几件波动。2008年以后,其申请量又处于波动的下降段。这主要是由于导航与控制算法保密性较强,不适宜采用专利形式来保护。
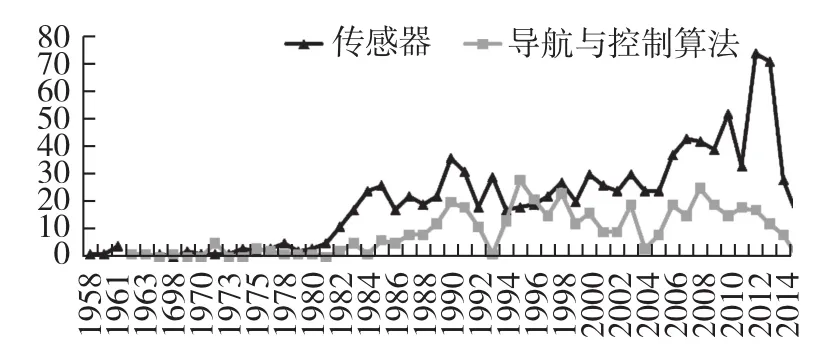
图2 传感器与导航算法专利申请趋势对比图Fig.2 Comparison of patent application trends for sensor and navigation control algorithms
对各国专利申请文件进行汇总统计,发现美、中、日拥有申请量最多。对所述3个国家按技术分支进行细化统计,得到图3所示的分布图。从3个国家的技术分布来看,日本的发展较为均衡,除导航相机外,各技术分支均有较多技术积累;美国的技术构成则是两线并进,硬件方面以惯性导航传感器为主,软件方面则注重导航算法的研究;中国技术分布也以惯性导航传感器和天文导航传感器为主,其他则较少。虽然美日的技术分布有差异,但两国在导航算法上都较侧重。可见,导航算法上的研究不可偏废,中国在该分支仍需加大研发力度,迅速提高技术水平。
1.3 主要专利权人或申请人专利分析
选取全球申请进行申请人统计分析,得到如图4所示的申请人排名。其中,霍尼韦尔公司申请量最多,其次是诺格公司和波音公司,日本的三菱、东芝和NEC也在前10名之列。前10名中,中国仅有中国空间技术研究院和北京航空航天大学排在第7位和并列第10位,浙江大学排在第12位。总体来看,全球范围内,美日企业占绝对优势,无论是申请人数量还是申请量上,中国与美国和日本有着一定的差距。

图3 主要国家的技术分支分布图Fig.3 Distribution of technical branches in major countries

图4 全球专利申请人排名Fig.4 Ranking of global patent applicants
霍尼韦尔公司申请专利104项。该公司在光学陀螺领域实力雄厚,产品型号众多。霍尼韦尔公司生产的典型激光陀螺产品型号有GG1330、GG1342、GG1320、GG1328、GG1308、GG1389等。GG-1389型陀螺仪,零漂值为0.00015(°)/h,输入速率动态范围1500(°)/s,使用寿命20万小时以上,平均无故障时间大于1万小时,输入轴对准稳定度达到微弧量级。GG1308为代表,采用BK-7级(类似我国K9)玻璃,通过镜片、电极整体烧结工艺一次成形,总体积小于2立方英寸,其精度达1(°)/h,质量为60g,能承受20g的振动,每只售价仅为1000美元。霍尼韦尔的另一种低成本陀螺为GG1320,其精度为0.1(°)/h,质量为100g,输入速率可达±800(°)/s。采用GG1320组成的INS型号为H-764C,定位精度<1.0nm/h,其中的加速度计为QA2000。体积为17.8cm×17.8cm×27.9cm,质量为9.1kg。霍尼韦尔公司在光纤陀螺领域也处于领先地位,DARPA进行的用于绝对参考的紧凑型超稳定陀螺项目(COUGAR),其相关技术就是由霍尼韦尔公司研究人员研究开发的。霍尼韦尔公司研制的第一代高性能的干涉仪式光纤陀螺采用的是Ti内扩散集成光学相位调制器。采用的其他器件还有0.83μm宽带光源、光电探测器/前置放大器模块、保偏光纤偏振器、两个保偏光纤熔融型耦合器以及由1km保偏光纤构成的传感环圈。为了满足惯性级光纤陀螺的要求,霍尼韦尔公司研制的第二代高性能干涉仪式光纤陀螺采用了集成光学多功能芯片技术以及全数字闭环电路。
诺格公司共申请专利69项。该公司生产的用于商业、航空航天和工业应用的LN-200C光纤陀螺(FOG)惯性测量单元(IMU),能为来自世界各地的客户提供更大的灵活性和易用性,但受出口管理条例(EAR)控制。该紧凑型单元包括3个固态光纤陀螺仪和3个固态硅微机电系统(MEMS)加速度计,用于测量相对于其壳体固定的坐标系中的速度和角度变化。增量速度和角度的数字输出数据通过数字串行数据总线提供给用户设备。公司生产的高精度光纤陀螺是FOG2500,其动态范围最大值为100(°)/s,标度因数为0.01″,标度因数稳定性1×10-6,随机游走为0.0006(°)/h,漂移率为0.001(°)/h。
波音公司在天文导航传感器和惯性导航传感器方面也有较好的技术积累。该公司与霍尼韦尔公司有较好的合作,曾为美国海军F/A-18战斗机提供霍尼韦尔的环形激光陀螺导航航电系统。
日本的三菱、东芝和NEC相关专利也在前10名之列。其中,三菱集团产品包括国际空间站日本部分。在导航与控制算法方面有较多积累。在日本宇宙航空研究开发机构(JAXA)的指导下,NEC参与到最新空间技术的开发和应用。
从图5可以看出,美国3家公司的专利布局范围最广,在很多国家和地区均有布局。其中,霍尼韦尔公司除主要布局美国外,比较看重欧洲和日本市场,同时也向世界知识产权组织提交了一定数量的PCT国际申请。在具体的欧洲国家中,主要侧重德国,共有35件申请。诺格公司的全球布局更均衡一些,除欧洲和日本外,在加拿大也有20件相关专利申请。相比较而言,波音公司的布局则更侧重美国本土,其海外布局国家较多,但总数量很少。据此推测,其遇到的竞争应主要来自美国国内。

图5 主要申请人的全球专利布局对比图(单位:项)Fig.5 The main applicant's global patent layout comparison chart(unit:item)
北京航空航天大学只在中国国内和美国进行布局,无其他国家和地区的申请。虽然海外布局略显单薄,但在财力、精力等客观因素制约较多的情况下,选择美国这一具有广阔市场的国家作为海外布局的优先对象,在专利布局策略上属于较明智的举措。
日本的三菱集团和东芝集团全球布局中,除本国外,布局最多的也是美国。而在另一个较为重要的海外市场——欧洲,两家企业的布局又略有差异,三菱集团侧重欧专局和法国,而东芝公司则在法国和德国进行了申请。
可见,在全球布局策略中,各主要竞争对手都很看重美国市场,其次就是日本和欧洲。对于欧洲的具体国家布局上,美国公司更偏重德国;而2家日本企业均在法国有专利申请。
1.4 技术发展路线分析
惯性导航传感器在自主导航与控制技术中的专利申请量最多,是各国研发重点。本文结合重点专利信息对惯性导航传感器技术的发展路线进行详细分析。通过对申请日期、被引证频率、同族情况以及技术内容的综合考虑,确定了如图6所示技术发展路线图中的重点专利,反映该技术的技术演进。

图6 惯性导航传感器重点技术发展路线Fig.6 Inertial navigation sensor key technology development path
从重点专利技术出现年代来看,在1980年~1984年间,惯性导航传感器中出现了5项重点技术。其中,1980年出现了加速度计方面的关键技术,联合技术公司的双量程悬臂质量块加速度计(US4346597A)。1984年是取得技术成果较多的一年,共有3项与陀螺仪有关的重点技术,其中2项与光纤陀螺仪有关,1项与激光陀螺仪有关。这一时期,立顿系统公司的研发实力较强。1985年~1989年间,加速度计的重点技术略多。其中,麻省理工学院提出了一种量子隧道悬臂加速度计(US4638669A),日本航空电子工业公司提出一种加速度计宽温适用线路(US4887467A)。从1990年~1994这5年间,惯性导航传感器方面的重点技术并不多,其中美国空军提出了一种紧凑型轻小型化光纤陀螺(US5260962A)为美国政府资助项目。1995年~1999年间,惯性导航传感器方面面临发展瓶颈,重点技术仅有1项。2000年~2004期间,诺格公司、立顿系统公司(当时尚未被收购)、霍尼韦尔公司、波音公司、Draper实验室和Frequency Electronics公司取得了多项关键技术的突破。其中,Draper实验室提出的一种增强版的光子晶体干涉光纤陀螺为美国政府资助项目。2005年~2009年间,霍尼韦尔公司在光纤陀螺和激光陀螺方面取得技术突破,3项重点技术均为该公司提出。由于2010年~2015年间的专利文献尚未全部公开,因此有关重点技术不多,但仍可看出霍尼韦尔公司在光纤陀螺和激光陀螺方面继续保持研发优势,3项重点技术均属于该公司。
从技术发展脉络来看,3种传感器虽然均以提高精度为发展方向,但在具体途径上,光纤陀螺的发展[4]经历了从提高零偏、刻度因子等稳定性到死区误差抑制和采用光子晶体光纤的陀螺的发展;从20世纪80年代到现在,其研发改进一直在持续进行。可见,光纤陀螺技术具有较好的应用优势。在光纤陀螺重点技术发展过程中,霍尼韦尔公司后期拥有较大优势。2000年以后出现的5项重点专利技术有4项都来自于该公司,该公司的研发方向在较大程度上代表了光纤陀螺的发展方向。从技术路线图上看,霍尼韦尔公司在2002年和2013年分别申请了有关死区误差抑制方面的专利(US6744519B2和US20150022819A1),由此判断,死区误差是影响光纤陀螺精度的一个关键因素。如何有效抑制死区误差,是光纤陀螺精度提升的重要途径。
对于激光陀螺,从发展过程来看,其重点专利技术主要涉及外部误差的减小或消除。20世纪80年代上半期主要是系统形变误差和温度补偿;2000年以后,对环境振动或冲击的影响关注增多。2005年以后的3项重点技术均来自霍尼韦尔公司,可见该公司在激光陀螺技术方面也有雄厚的实力。纵观激光陀螺的技术脉络,对于结构改进或创新的重点技术很少,提高精度和抗干扰的解决思路主要是从外界强振动或冲击(US6538745B1、US7388670B2)以及温度影响(US7916302B2)的角度考虑。可见,增强环境适应性是其主要发展方向。
对于加速度计,其关键技术中,从早期的双量程悬臂加速度计(US4346597A)到基于量子隧道效应的悬臂加速度计(US4638669A),再到无磁加速度计(US7331229B2)或加速度计中高精度频率振荡器的设计(US7106143B2),大都是结构和部件方面的改进,即使涉及误差补偿,也是通过在加速度计外部增加误差校正部件的方式来对加速度计的测量误差进行补偿(US7650253B2)。可见,对于加速度计的改进,国外主要是基于新原理、新技术的器件设计,很少从补偿算法等方面去考虑改进。关于技术发展连续性方面,从图6可以看出,其相关重点专利技术的出现时段并非一直连续,从一个侧面反映出加速度计相对成熟,重要改进或突破有一定难度。并且,加速度计相关6项重点专利技术分属6个专利权人,也侧面反映出该子领域竞争相对剧烈,很难一家长期保持创新优势。
综合分析惯性导航传感器3个子分支的技术发展路线,从专利文献技术角度来看,在光学陀螺领域(光纤陀螺和激光陀螺),霍尼韦尔公司具有较强的技术优势,且光纤陀螺由于精度一直在不断改进提高,结合该陀螺相对于激光陀螺的成本优势,将是未来的一个发展方向。加速度计方面,从重点专利技术来看,虽然没有出现像霍尼韦尔公司这样一家独大的局面,但是考虑到该技术的整体成熟度,取得突破的难度较大。
2 结论
未来几年,自主导航与控制技术的相关专利申请量和申请人数量仍将保持较高增长趋势。总体来看,自主导航与控制技术正处于技术发展期[5],前景看好。通过上述专利分析,有助于全面了解国外技术发展脉络,为国内相关企业技术开发提供知识、信息基础。
[1]崔平远,徐瑞,朱圣英,等.深空探测器自主技术发展现状与趋势[J].航空学报,2014,35(1):13-28.CUI Ping-yuan,XU Rui,ZHU Sheng-ying,et al.State of the art and development trends of on-board autonomy technology for deep space explorer[J].Acta Aeronautica et Astronautica Sinica,2014,35(1):13-28.
[2]毛金生,冯小兵,陈燕.专利分析和预警操作实务[M].北京:清华大学出版社,2009.MAO Jin-sheng,FENG Xiao-bing,CHEN Yan.Patent analysis and early warning operating practices[M].Beijing:Tsinghua University Press,2009.
[3]Perino M A,Fenoglio F,Pelle S,et al.Outlook ofpossible european contributions to future exploration scenarios and architectures[J].Acta Astronautica,2013,88(88):25-34.
[4]于登云.航天器机构技术[M].北京:中国科学出版社,2011.YU Deng-yun.Thespacecraft mechanism technology[M].Beijing:Science and Technology of China Press,2011.
[5]Mukherjee J,Ramamurthy B.Communication technologies and architectures for space network and interplanetary Internet[J].IEEE Communications Surveys&Tutorials,2013,15(2):881-897.
Research on Patent Analysis of Autonomous Navigation and Control Technology for Deep Space Exploration
LIANG Hong-feng1,CHU Peng-jiao1,WANG Yong-fang1,RU A-chang1,WANG Zhen-hua2
(1.China Aerospace Academy of Systems Science and Engineering,Beijing 100048;2.Beijing Institute of Control Engineering,Beijing 100080)
Deep space exploration,as an important direction of human space activities,is an inevitable way for mankind to explore the mysteries of the universe and to seek long-term development.It is also an important symbol to measure the comprehensive national strength and the level of science and technology development.As a kind of important technology in deep space exploration,autonomous navigation and control technology is attracting more and more attention and has been applied,which has become one of the hotspots in the research and development of deep space exploration technology.This paper takes the autonomous navigation and control technology of deep space exploration as the object,through patent search analysis,to research the development status at home and abroad,trying to obtain the technical trend and development suggestion.
deep space exploration;autonomous navigation;sensor;control technology;patent analysis
V448.2
A
1674-5558(2017)07-01389
10.3969/j.issn.1674-5558.2017.03.016
梁洪峰,男,硕士,研究方向为专利分析评议。
2017-04-13