战术导弹用MEMS陀螺仪研制进展及关键技术
2017-06-10李伟忠
李伟忠,孙 鹏
(1.海军驻上海地区航天系统军事代表室,上海201108;2.北京航天控制仪器研究所,北京100039)
战术导弹用MEMS陀螺仪研制进展及关键技术
李伟忠1,孙 鹏2
(1.海军驻上海地区航天系统军事代表室,上海201108;2.北京航天控制仪器研究所,北京100039)
MEMS陀螺仪具有体积小、质量轻、启动快、可靠性高、价格低、易于大批量生产、能承受恶劣环境条件等突出优势,可广泛应用于防空导弹、反坦克导弹、便携式导弹、航空制导炸弹等制导武器。介绍了MEMS陀螺仪的基本原理、发展现状,分析了战术导弹对MEMS陀螺仪的应用需求,指出了MEMS陀螺仪在战术导弹型号应用中需解决微机械加工工艺、全温性能指标、复合力学环境等关键技术问题,对MEMS陀螺仪在战术导弹中的应用具有指导意义。
MEMS;陀螺仪;战术导弹
0 引言
MEMS技术是一个多学科交叉的前沿性领域,以微电子技术为基础,通过系统构架技术和算法软件技术,将微型传感器、微型执行器、信号处理和控制电路、接口电路、通信系统以及电源集成于一体,构成一个微型多功能机电系统。MEMS技术对复杂系统设计和精确制导武器的发展产生了巨大的推动作用。根据美国国防部公开出版物披露,已经有若干微型技术产品加入美军方武器库,按功能分,大致有3个方面:武器惯性测量、飞行器导航与稳定以及用于武器保养的分布式传感器技术[1]。
采用MEMS惯性传感器,是防空导弹、反坦克导弹、便携式导弹、航空制导炸弹、制导弹药等制导武器系统的必然选择。预计到2020年美军90%的制导武器将采用MEMS惯性传感器[2],如图1所示。
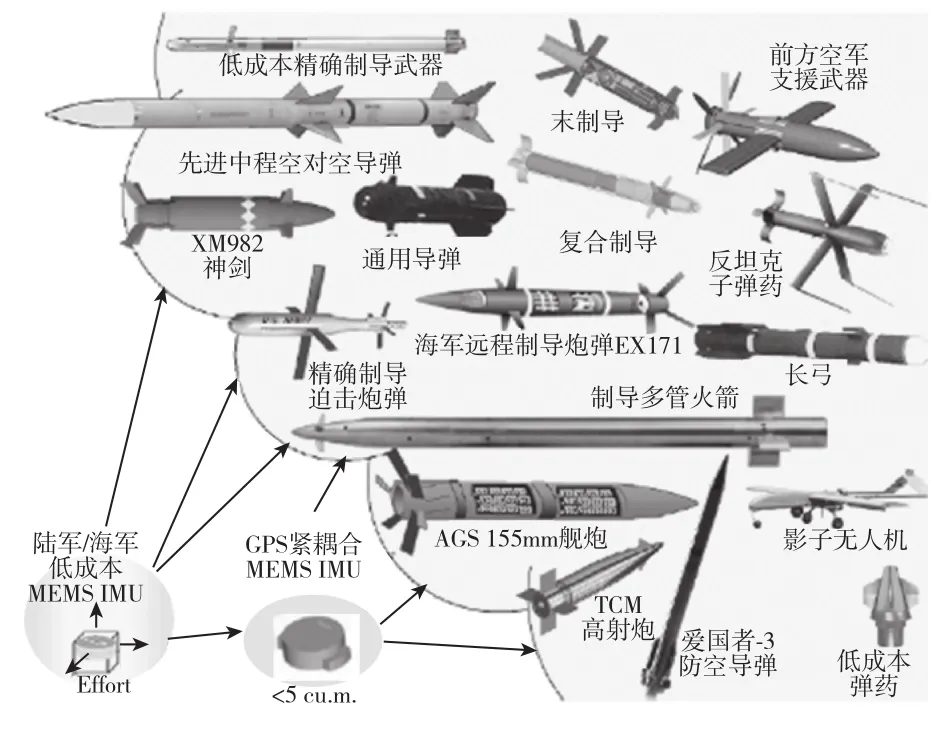
图1 2020年美军90%的制导武器将采用MEMS惯性传感器Fig.1 About 90%guided weapon will use MEMS inertial sensors by 2020 in USA
1 战术导弹对MEMS陀螺仪的需求分析
根据陀螺仪的精度不同,陀螺仪产品分为战略、导航、战术和商业共4个等级,图2给出了陀螺仪的精度范围[3]。目前,MEMS陀螺仪的精度主要适用于战术导弹、中近程制导、飞行控制、灵巧弹药等军用领域,主要用于导航制导、姿态测量与稳定控制等方面。
1.1 对微型化低功耗的要求
随着军事技术的不断发展,导弹的作战能力日益增强,导弹攻防对抗日趋激烈。为应对不断发展的新型导弹威胁,世界军事强国高度重视颠覆性技术发展及作战概念创新,以期获得克敌制胜的作战优势,改变未来导弹攻防作战样式。
影响导弹发展的颠覆性技术之一即微系统技术。微系统技术可促进导弹的微小型化和智能化,能够有效降低系统尺寸、质量与能耗,提高系统性能。采用微系统技术研制的MEMS陀螺仪有体积小、质量轻、集成化程度高、功耗低等优点,适用于战术导弹的制导系统、光学伺服稳定机构、姿态控制系统等。
1.2 对制导精度的要求
随着现代战争的需要和现代武器装备的发展,采用小型武器进行精确打击代表着未来军事高科技的发展趋势,对制导精度也提出了新的要求,进一步拓展了MEMS陀螺仪在战术导弹中的应用领域。
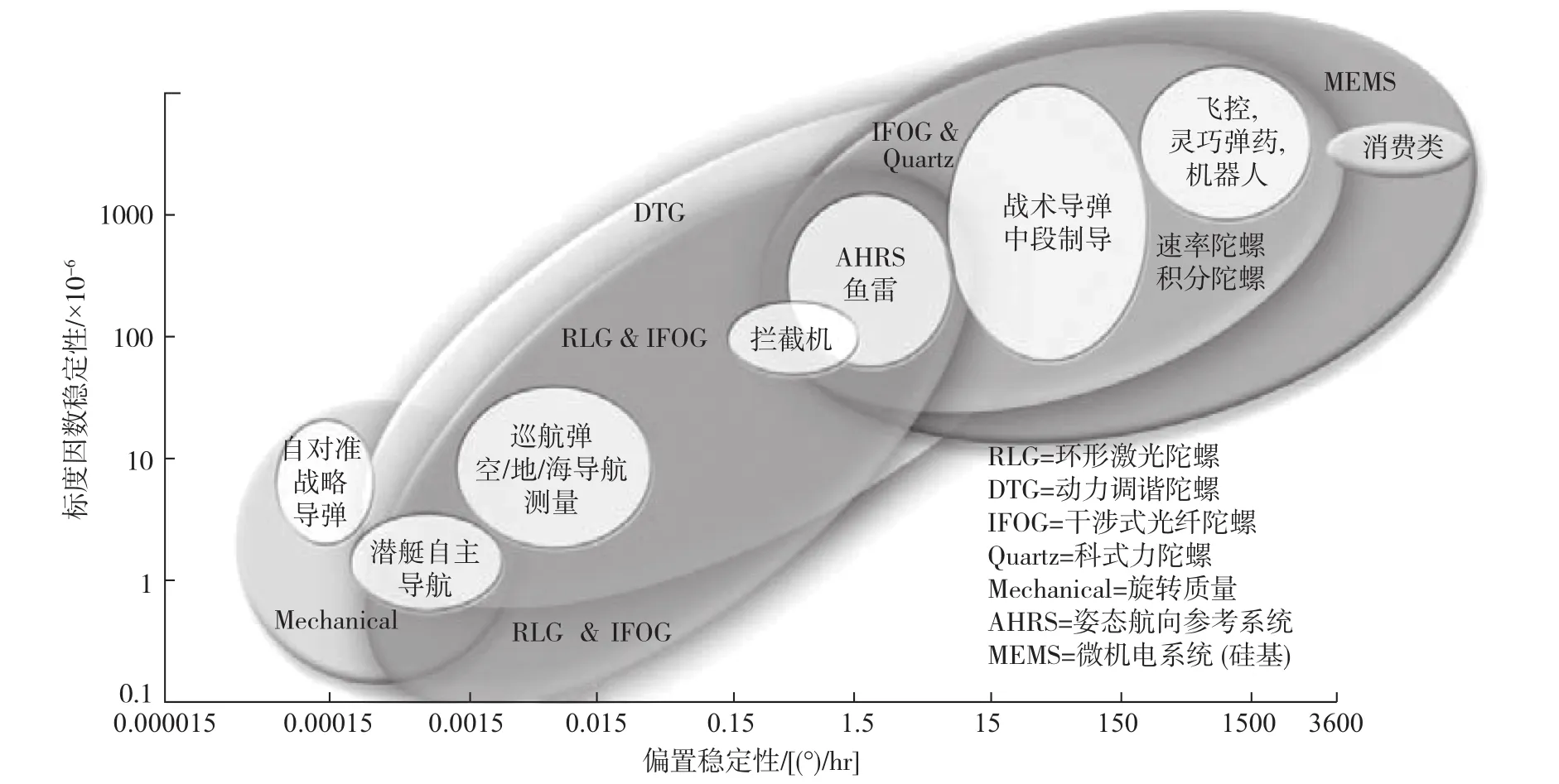
图2 陀螺仪的精度范围Fig.2 Accuracy range of gyro
旋转导弹弹体滚动轴向高速旋转,高达9000(°)/s。长期以来,旋转导弹弹旋频率一直无法直接实时测量,主要是无法满足弹体结构尺寸(小体积)和大的测量范围的要求。针对旋转导弹弹旋频率测量的需求,出现了一种大量程MEMS陀螺仪,可广泛应用于舰载防空导弹、便携式防空导弹、反坦克导弹等旋转导弹中[4]。
当导弹接近目标时,弹体抖动加大,若无角速度传感器构成的阻尼回路将导致脱靶量增加。对偏航MEMS陀螺仪提出了明确需求,用于稳定回路(阻尼回路)的角速度反馈,以增加导弹的等效阻尼系数,输出与弹体偏航轴角速度成比例的正弦波信号。
稳像技术作为精确制导武器的主要技术力量成为未来精确制导一个重要发展方向,采用辅助稳像设备的红外成像导引头是导弹的重要组成部分。MEMS陀螺仪成为辅助稳像设备的必然选择,也直接影响了稳像的质量[5]。
1.3 对环境适应性的要求
环境适应性与武器装备的战术技术性能指标一样,是衡量武器装备设计优劣以及研制质量的重要指标,直接影响到武器装备的实际作战效能。
战术导弹作战使用环境复杂,贮存周期长,可靠性要求高,飞行条件下的噪声、振动、过载、温度等环境条件恶劣,要求惯性仪表必须具有很高的性能及较好的长期稳定性。MEMS陀螺仪环境适应性强、可靠性高的特点能够较好地满足战术导弹对环境适应性的要求。
1.4 对低成本的要求
高成本一直是制约精确制导导弹大量装备与使用的一个主要因素,MEMS陀螺仪成本低、易于批量化生产的特点成为降低武器装备成本的首选。
MEMS陀螺仪占领着5(°)/h~10(°)/h的陀螺市场,如图3所示,这些MEMS陀螺仪中部分价格低至100美元。与之竞争的光纤陀螺或机械陀螺,零偏稳定性在1(°)/h~5(°)/h的,市场价格为单轴2000美元~4000美元[6]。
2 MEMS陀螺仪工作原理及发展现状
2.1 MEMS陀螺仪工作原理
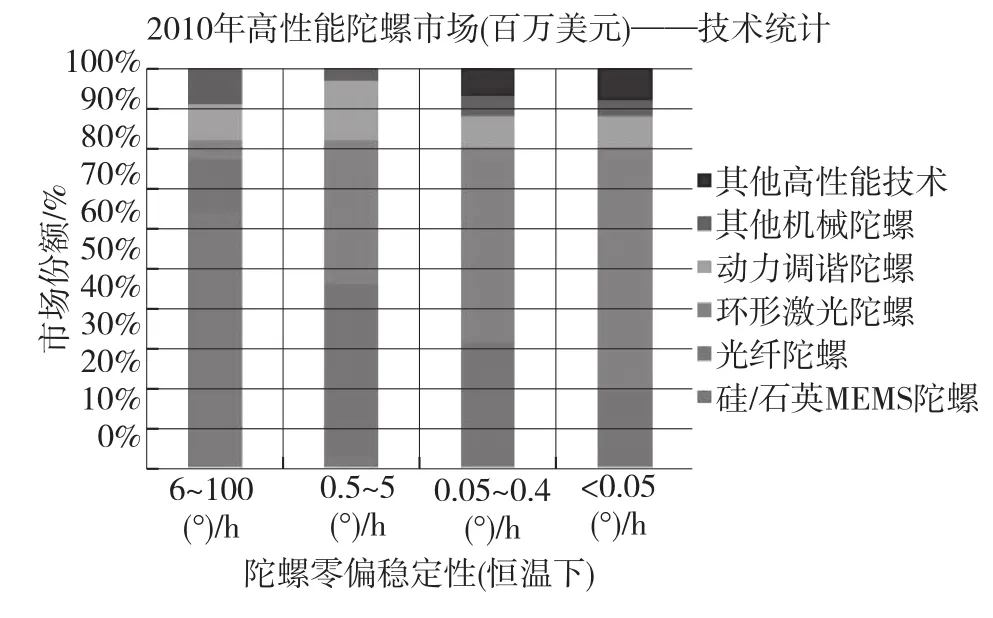
图3 高性能陀螺仪市场统计Fig.3 Statistics for high-performance gyroscope market
MEMS振动陀螺仪是利用改变振动物体振动平面的方向来产生陀螺力矩,其主体是一个作高频微幅振动的元件,利用高速振动的质量在被基座带动旋转时所产生的Coriolis效应来敏感角运动[7]。
如图4所示,质量块在X方向以速度V高频振动,与Z方向的角速率Ω相互作用,产生Y方向的哥氏加速度。振动质量在Y方向受到哥氏力作用产生强迫振动,Y方向的振动幅值就代表了哥氏力的大小,再按相应的比例关系即可解算出输入角速率的大小。
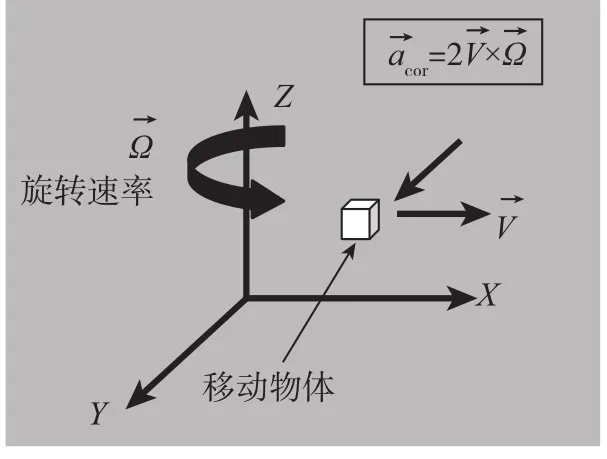
图4 振动式陀螺仪原理示意图Fig.4 Working principle of MEMS gyroscope
2.2 MEMS陀螺仪发展现状
随着对MEMS陀螺仪工作机理、内部结构、封装技术、温度补偿技术、微机械加工工艺技术等的深入研究,MEMS陀螺仪的精度得到快速提高。目前,国外公开报道精度最高的MEMS陀螺仪产品是挪威Sensonor公司的蝶形陀螺SAR500[8],采用了音叉式的工作结构,驱动和检测模态均为反相的扭转振动,如图5所示。SAR500的主要精度指标:测量范围为±500(°)/s,标度因数误差为±3×10-4,零位稳定性为0.04(°)/h,零偏重复性为0.1(°)/h。
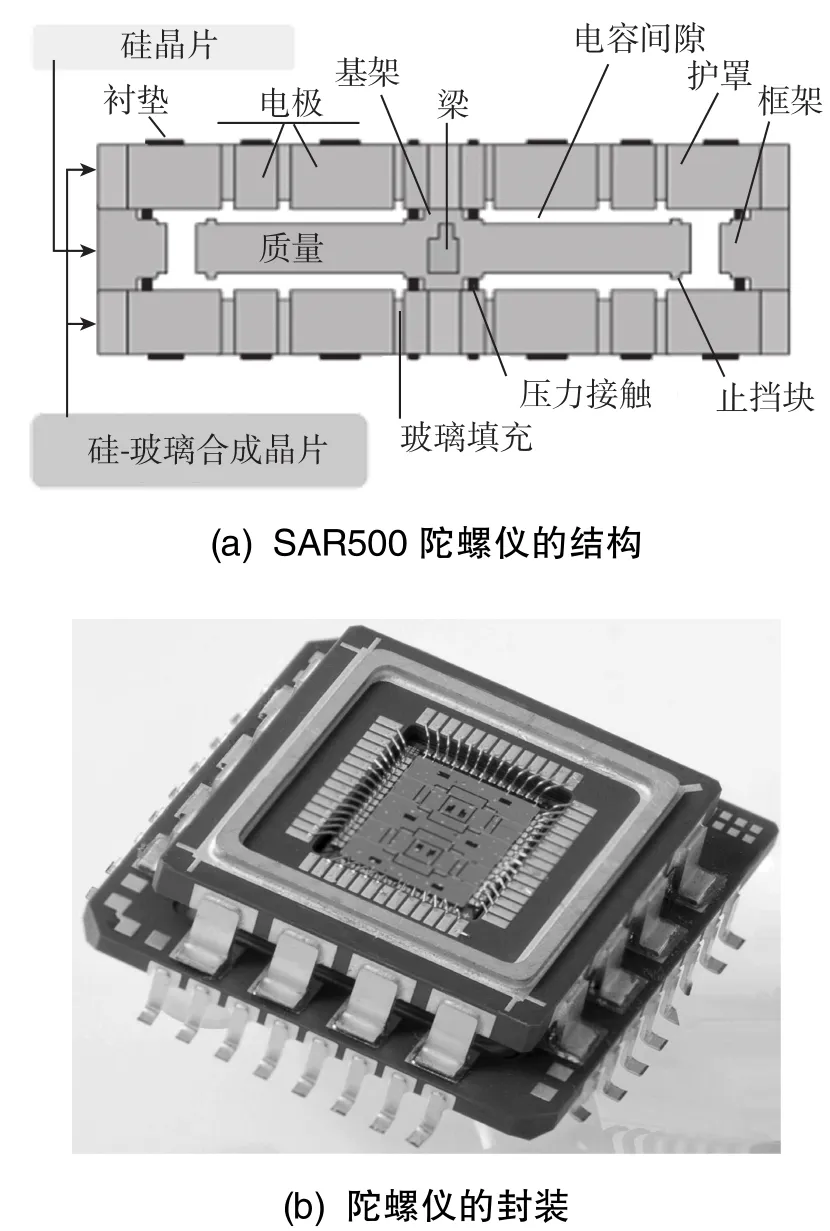
图5 SAR500陀螺仪Fig.5 SAR500 gyro
国内MEMS陀螺仪的研制始于20世纪90年代,主要研制单位有清华大学、东南大学、南京理工大学等高校,中科院上海微系统所、微电子所、半导体所等研究机构,电科13所、电科26所、航空618所、航天33所、航天13所等工程单位。目前,国内自主研发的MEMS陀螺仪零偏稳定性已优于10(°)/h,可以达到战术级精度水平,并已在战术武器中应用。
国内MEMS陀螺仪的研制工作还需要解决的主要问题包括:圆片级真空封装技术,检测力平衡技术,正交误差补偿技术,幅度、频率高精度控制技术等[9]。
2.3 MEMS陀螺仪发展趋势
在未来10年,MEMS陀螺仪的精度水平(零偏稳定性)仍有大于1个数量级的提升空间,如图6所示[10],这主要取决于微机械加工的精度、集成化的水平、敏感结构的真空封装等关键问题的解决。
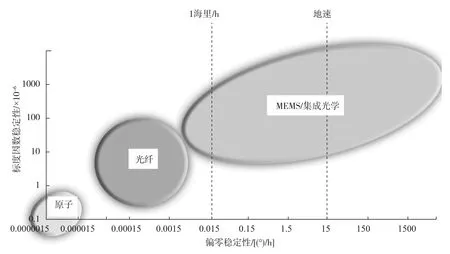
图6 未来陀螺仪技术的应用Fig.6 Applications of far-term gyro technology
3 MEMS陀螺仪关键技术
随着MEMS陀螺仪在战术武器中的应用,研制过程中暴露出许多问题。为了提高战术导弹的研制质量,向部队提供性能先进、质量优良的武器装备,MEMS陀螺仪还需要解决以下几个关键技术问题。
3.1 长期稳定工作的基础——微机械加工工艺
MEMS陀螺仪对微机械加工工艺具有高度的敏感性,加工工艺偏差、加工应力以及可靠性等对MEMS陀螺仪的成品率至关重要。整个微机械加工工艺流程是实现MEMS陀螺仪长期稳定工作的基础,必须加强微机械加工工艺过程的控制。
(1)加工精度控制
MEMS陀螺仪微敏感结构的加工精度主要体现在梳齿、弹性梁等关键结构的加工误差控制,这直接影响了MEMS陀螺仪敏感结构的对称性、谐振频率、相位以及振动稳定性等结构特性。
如图7所示,重点关注微结构高深宽比条件下,侧壁垂直度90°±0.5°,微结构关键尺寸的工艺误差±0.5μm,精确控制微结构厚度误差±2μm,在加工过程中采取有效措施进行加工精度控制。
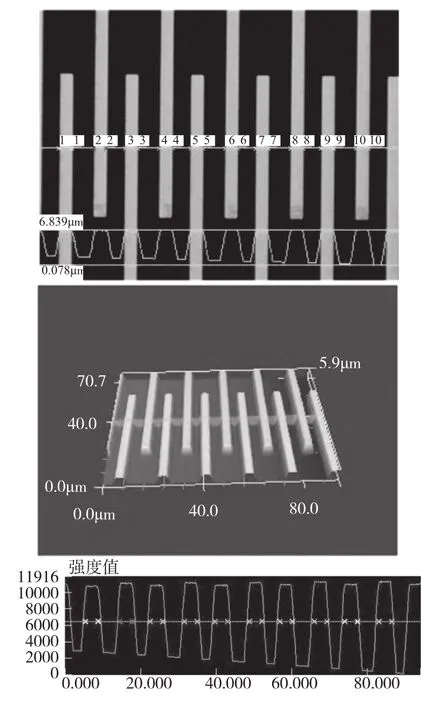
图7 微机械结构加工精度监测Fig.7 Dimension test of MEMS structure
(2)工艺参数在线控制
根据产品过程质量控制的要求,需要对整个微机械加工工艺流程进行在线控制,如图8所示。在MEMS陀螺仪微机械加工工艺复杂流程中,应识别出产品的关键工艺参数,建立一整套在线测试与质量评估方法,提高微机械加工工艺一致性和成品率,如光刻对准精度的在线监测、键合强度的在线监测、采用扫频技术测量敏感结构振动幅度与频率的关系以及装配过程的应力测试等。
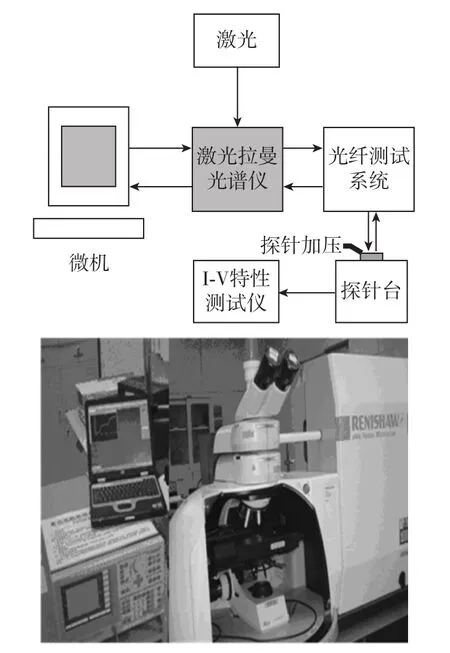
图8 工艺参数在线控制Fig.8 On-line control of process parameters
(3)环境适应性筛选
环境适应性筛选是为了早期剔除有故障的器件,MEMS陀螺仪敏感结构失效模式包括残余应力、结构断裂和疲劳等。
残余应力的存在会降低微结构的使用寿命,尤其在频繁振动和冲击的情况下会对微结构造成致命的伤害。结构断裂主要发生在梳齿或微悬臂梁处,会使器件输出非线性,同时产生的微粒还可能在器件内部形成短路。疲劳是指在低于材料弯曲或破裂强度的周期应力作用下导致器件失效,通常发生在硅微结构应力集中的部位。机械疲劳应力经过不断累积,导致可动部件的断裂,器件的寿命缩短,最终引发失效。
国内大部分MEMS试验室依据微电子可靠性试验标准,如《GJB 548B-2005微电子器件试验方法和程序》,进行环境适应性筛选试验。对于这类标准在MEMS器件中的适用性还有质疑,需要进一步开展相关研究工作[11]。
3.2 武器型号应用的瓶颈——全温性能指标
MEMS陀螺仪敏感结构是采用硅基材料加工而成的,硅基材料的温度特性直接影响着硅谐振器的谐振特性,进而影响其谐振频率、幅值以及相位,最终影响MEMS陀螺仪的全温零偏和标度因数的性能指标。
国内MEMS陀螺仪的零偏稳定性指标优于10(°)/h,但是全温(-40℃~+70℃)条件下零偏变化却增加到100(°)/h以上,此项指标直接影响到MEMS陀螺仪在战术导弹中的应用。
目前,提高MEMS陀螺仪温度性能指标采取的主要措施是建立性能指标的温度模型,并进行温度补偿,模型方程为:

式(1)中,Bi为零偏,Ki为标度因数,分别为温度Ti的2次多项式,根据补偿精度要求多项式的阶次可以更高,也可以采取分段补偿的方式进行,温度补偿原理如图9所示。
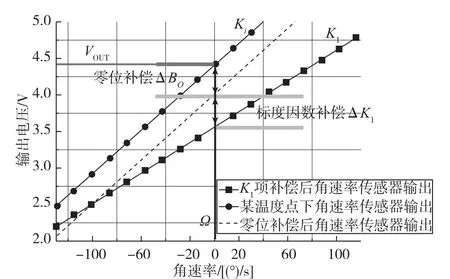
图9 温度补偿原理Fig.9 Principle of temperature compensation
按图9的温度补偿原理对MEMS陀螺仪输出进行补偿,补偿后某温度点下MEMS陀螺仪输出值如式(2)所示:

图10所示为某型号MEMS陀螺仪产品温度补偿前后的试验结果,温度补偿前零偏全温变化达1450(°)/h,通过温度补偿可以达到优于100(°)/h的结果。
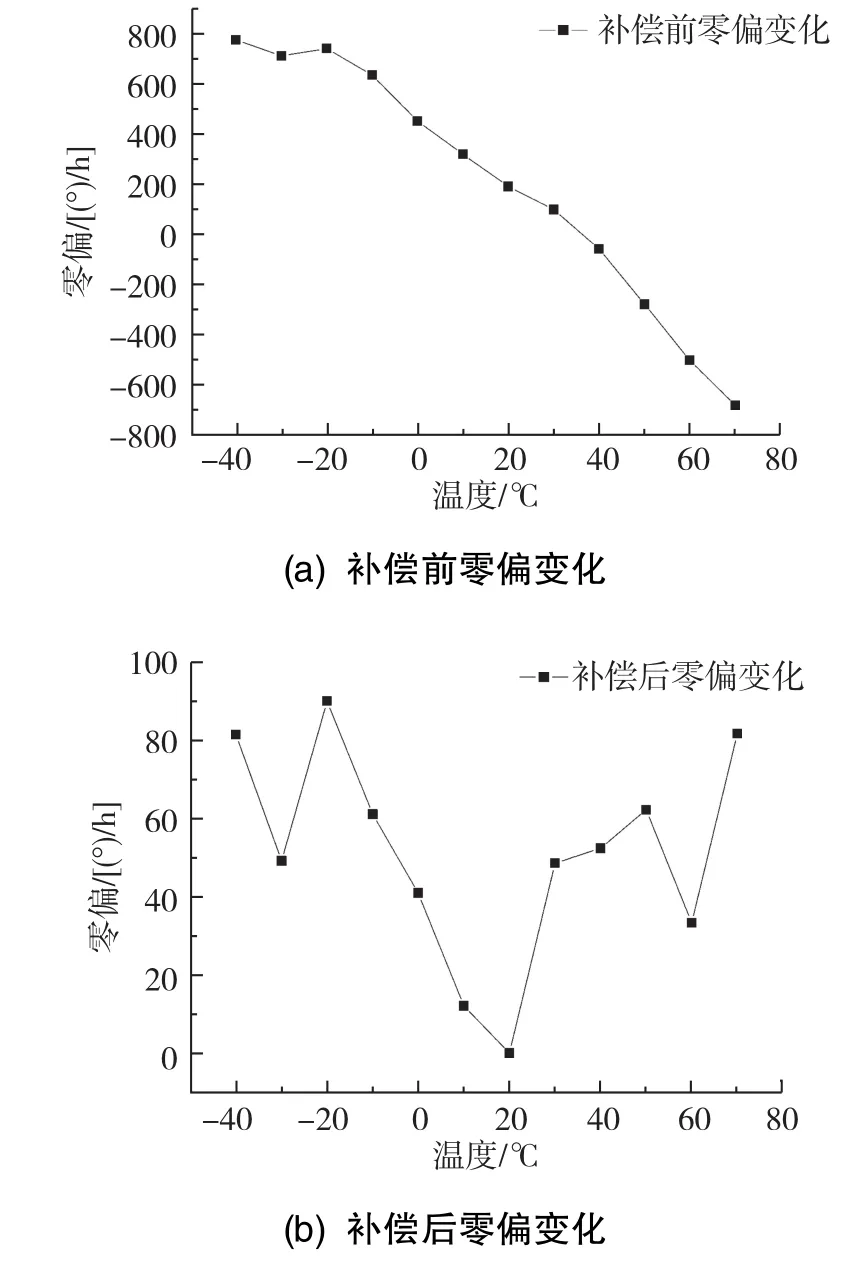
图10 温度补偿前后对比图Fig.10 Comparison before and after temperature compensation
MEMS陀螺仪温度性能指标还有待进一步提高,需要开展温度对微机械结构工作参数的影响机理研究,从源头上将温度影响因素引入整个微机械系统的研究设计中[12]。
3.3 质量与可靠性风险——复合力学环境
战术导弹在发射时的瞬时冲击、主动段飞行时发动机推力脉动产生的振动、自动驾驶仪舵机系统中的舵偏转运动产生的定频振动、超声速飞行过程中的噪声(又叫“音振”)、旋转体制战术武器的高速旋转产生的离心力等等,这些力综合作用形成飞行过程中复杂的复合力学环境。
MEMS陀螺仪作为战术导弹制导控制系统中的关键测量部件,其测量误差是制导系统主要的误差源。导弹飞行过程与地面测试存在着天地环境差,使得由地面单一环境测试得出的误差模型与实际飞行有很大的差别[13],使得MEMS陀螺仪在导弹飞行过程中复合力学条件下工作可靠性问题没有得到完全解决,使MEMS陀螺仪在战术导弹应用中存在较大的风险。
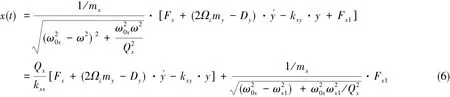
以静电梳状驱动的线振动式MEMS陀螺仪为例,其数学模型如式(3)所示:
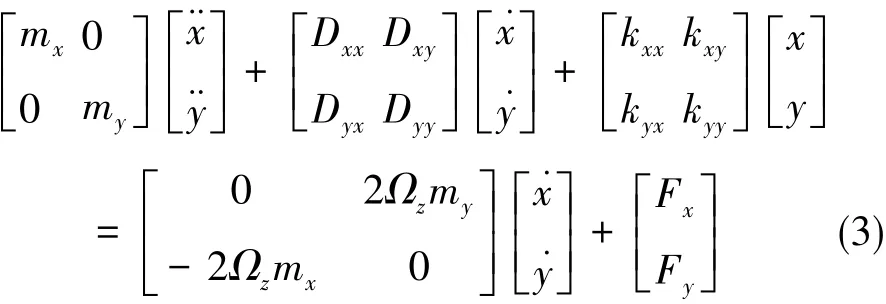
由式(3)得出MEMS陀螺仪驱动模态的运动方程:


当外部力学环境作用到驱动轴时,驱动模态的运动方程可表示为:

当MEMS陀螺仪正常工作时,驱动轴的运动工作结构谐振点ωd=ω0x,通常在15kHz以上,而外部力学环境的振动频率设为ωx1,因此驱动模态的运动位移可表示为:
由式(3)得出MEMS陀螺仪检测模态的运动方程为:

当外部力学环境作用到检测轴时,检测模态的运动方程可表示为:

由此得出检测模态的运动位移:
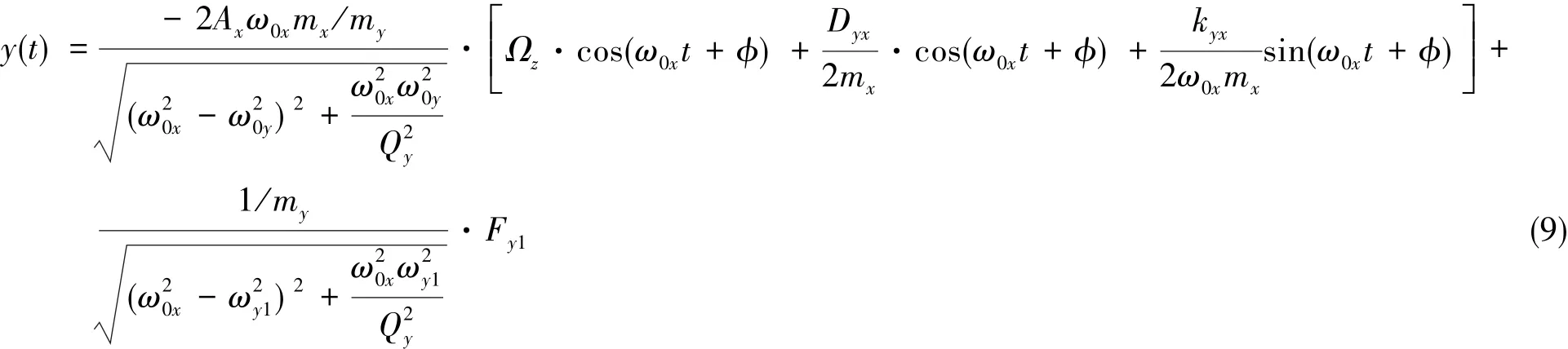
从式(6)和式(9)可以看出,外界力学环境将导致MEMS陀螺仪驱动和检测模态的运动位移发生变化,最终使MEMS陀螺仪的输出发生偏移,严重时失效。
在MEMS陀螺仪的应用过程中应充分考虑弹上复合力学环境对其影响,同时应急需开展复合力学环境下MEMS陀螺仪的失效机理、试验验证及评估技术研究。
4 结论
MEMS陀螺仪的快速发展及在战术导弹上的应用是一个系统工程问题,突破MEMS陀螺仪在战术导弹应用过程中的一系列关键技术,解决武器装备研制过程中亟待解决的问题,满足型号任务需求,形成军用核心产品,将产生巨大的社会和经济效益。
[1]文苏丽,张冬青.MEMS技术的弹载应用[J].战术导弹技术,2012(4):1-8.WEN Su-li,ZHANG Dong-qing.Applications of MEMS technology to missile systems[J].Tactical Missile Technology,2012(4):1-8.
[2]李清洲,付丽萍,梁新建,等.浅谈MEMS惯性技术在制导弹药中的应用[J].导航与控制,2012,11(1):74-78.LI Qing-zhou,FU Li-ping,LIANG Xin-jian,et al.Analysis the application of MEMS inertial technology for guided munitions[J].Navigation and Control,2012,11(1):74-78.
[3]宋海凌,马溢清.惯性技术发展及应用需求分析[J].现代防御技术,2012,40(2):55-59.SONG Hai-ling,MA Yi-qing.Developing trend of inertial navigation technology and requirement analysis for armament[J].Modern Defence Technology,2012,40(2):55-59.
[4]姚勤,潘鹤斌,孙鹏,等.大量程MEMS陀螺仪在高速旋转导弹上的应用[J].导航与控制,2017,16(2):52-57.YAO Qin,PAN He-bin,SUN Peng,et al.Application of the large scale MEMS gyroscope in rolling airframe missile[J].Navigation and Control,2017,16(2):52-57.
[5]韩颖,黄剑侠,高原.MEMS陀螺在红外成像系统中的研究应用[J].红外技术,2015,37(3):248-257.HAN Ying,HUANG Jian-xia,GAO Yuan.Application of MEMS gyroscope in infrared imaging systems[J].Infrared Technology,2015,37(3):248-257.
[6]Perlmutter M,Robin L.High-performance,low cost inertial MEMS:a market in motion![C].Position Location&Navigation Symposium,2012:225-229.
[7]庄海涵,徐宇新,邢朝洋.MEMS谐振陀螺——走向大众的惯性仪表(上)[J].海陆空天惯性世界,2016(7):150-151.ZHUANG Hai-han,XU Yu-xing,XING Chao-yang.MEMS resonator gyroscope——inertial instrument for the masses(1st)[J].NAAS&Inertial Technology,2016(7):150-151.
[8]Lapadatu D,Blixhavn B,Holm R,et al.SAR500-A highprecision high-stability butterfly gyroscope with north seeking capability[C].Position Location&Navigation Symposium,2010,37(16):6-13.
[9]王巍.新型惯性技术发展及在宇航领域的应用[J].红外与激光工程,2016,45(3):1-6.WANG Wei.Development of new inertial technology and its application in aerospace field[J].Infrared and Laser Engineering,,2016,45(3):1-6.
[10]Schmidt G T.INS/GPS technology trends[C].RTO-ENSET-116(2011),2011:1-24.
[11]张瑞霞,张魁,赵海龙.MEMS加速度计可靠性评价[J].微纳电子技术,2014,51(3):198-202.ZHANG Rui-xia,ZHANG Kui,ZHAO Hai-long.Reliability evalution technology for the MEMS accelerometers[J].Micronanoelectronic Technology,2014,51(3):198-202.
[12]刘燕锋,陈志勇,张嵘.微机械应力测试结构的温度特性和应力抑制方法[J].光学精密工程,2016,24(6):1345-1351.LIU Yan-feng,CHEN Zhi-yong,ZHANG Rong.Temperature characteristics of MEMS stress-testing structure and a stress-suppressing method[J].Optics and Precision Engineering,2016,24(6):1345-1351.
[13]彭云辉,缪栋,王跃钢,等.过载振动复合环境下液浮积分陀螺仪误差建模与仿真[J].电光与控制,2007,14(2):138-141.PENG Yun-hui,MIAO Dong,WANG Yue-gang,et al.Error modeling and simulation of liquid floated integral gyro under overloading-vibrating environment[J].Electronics Optics&Control,2007,14(2):138-141.
Research on Progress and the Key Technology of MEMS Gyroscope in Tactical Missile
LI Wei-zhong1,SUN Peng2
(1.Navy Representative Office of Aerospace Systems in Shanghai,Shanghai 201108;2.Beijing Institute of Aerospace Control Devices,Beijing 100039)
MEMS gyroscope have outstanding advantages,such as small volume,light weight,quick start,high reliability,low price,easy mass production,and able to withstand harsh environmental,et al.It is the inevitable choice of tactical missile,for example air defense missile,antitank missile,portable air defense missile,and aerial guided bomb.This paper introduced the basic principle and development status of MEMS gyroscope,analyzed the application requirements of MEMS gyroscope in tactical missile,pointed out the key technical problems,such as micromachining technology,full temperature performance index,complex mechanical environment.It has guiding significance to the application of MEMS gyroscope in tactical missile.
MEMS;gyroscope;tactical missile
V241.5+54
A
1674-5558(2017)07-01390
10.3969/j.issn.1674-5558.2017.03.017
李伟忠,男,硕士,研究方向为制导控制。
2017-04-13