2016年国外惯性技术发展与回顾
2017-06-10薛连莉陈少春陈效真
薛连莉,陈少春,陈效真
(1.北京海鹰科技情报研究所,北京100074;2.北京航天控制仪器研究所,北京100039)
2016年国外惯性技术发展与回顾
薛连莉1,陈少春1,陈效真2
(1.北京海鹰科技情报研究所,北京100074;2.北京航天控制仪器研究所,北京100039)
以惯性技术研究与应用为主线,回顾了2016年国际惯性技术发展历程和现状,概括了惯性仪表、惯性系统当前的研究现状及应用,展望了惯性技术的未来发展。
惯性技术;惯性导航;光纤陀螺;MEMS陀螺
0 引言
惯性技术是一项可自主连续、全方位、全时空、不受外界干扰,敏感控制载体姿态轨迹的技术,其产品包括陀螺仪、加速度计等惯性仪表及其构成的各类系统,以及相应的测试试验、制造技术。随着国家创新驱动发展战略和军民融合战略的深入实施,“建设同我国国际地位相称、同国家安全和发展利益相适应的巩固国防和强大军队”,从国防大国向国防强国迈进,迫切需要提高我国惯性技术研发水平,切实加快惯性敏感器、惯性导航制导、惯性测量稳定等技术的研究与成果转化。为实现上述目标,对国外惯性技术跟踪研究,对其现状、技术特点及发展趋势,进行回顾和展望,以求借鉴。
1 惯性技术的发展历程
惯性技术已有百余年历史,其发展历程如图1所示。图1中,折线下方为该阶段主要技术理论,上方为出现的惯性器件及精度,各技术发展阶段间并无完整界限。按各类陀螺仪、理论和新型传感器先后,惯性技术发展通常分为4代。
第1代,基于牛顿经典力学原理。自1687年牛顿三大定律建立,到1910年的舒勒调谐原理,第1代惯性技术奠定了整个惯性导航发展的基础。典型代表为三浮陀螺、静电陀螺以及动力调谐陀螺,特点是种类多、精度高、体积质量大、系统组成结构复杂、性能受机械结构复杂和极限精度制约,产品制造维护成本昂贵,典型产品有美国MX洲际导弹用三浮仪表平台系统。
第2代,基于萨格奈克(Sagnac)效应。典型代表是激光陀螺和光纤陀螺,特点是反应时间短、动态范围大、可靠性高、环境适应性强、易维护、寿命长。典型产品是美国斯佩里公司研制成功的Mk39系列和Mk49型激光陀螺捷联式舰船惯性导航系统、美国霍尼韦尔公司的激光捷联惯导系统。光学陀螺的出现有力推动了捷联惯性系统发展。
第3代,基于哥氏振动效应和微米/纳米技术。典型代表是MEMS陀螺、MEMS加速度计及相应系统,特点是体积小、成本低、中低精度、环境适应性强、易于大批量生产和产业化。典型产品为美国霍尼韦尔公司HG1900、HG1930系列。MEMS惯性仪表的出现,使得惯性系统应用领域大为扩展,惯性技术已不仅仅用于军用装备,更广泛用于各类民用领域。
第4代,基于现代量子力学技术。典型代表为核磁共振陀螺、原子干涉陀螺,其目标是实现高精度、高可靠、小型化和更广泛应用领域的导航系统,其特点是高精度、高可靠性、微小型、环境适应性强。目前,DARPA研制的核磁共振陀螺精度能达到0.01[(°)/h](1σ)的水平,斯坦福大学开发的原子陀螺精度可达6×10-5[(°)/h](1σ)水平。

图1 惯性技术发展历程Fig.1 Development of inertial technology
2 惯性技术的研究现状
当前,国外惯性技术已进入光学和微机电时代。随着陀螺仪精度不断提高,环形激光陀螺、干涉型光纤陀螺和MEMS陀螺等固态陀螺仪逐渐成熟,捷联式惯性导航系统在低成本、短期中精度惯性导航中逐渐取代平台式惯性导航系统,以惯性为主的组合导航也用于更多领域。DARPA、Draper实验室、诺格、霍尼韦尔、基尔福特、罗克韦尔、亚诺德半导体、泰雷兹、KVH、iXblue等公司和研究机构,对惯性技术成熟和应用做出了卓越贡献。
通过对国外各大研究机构进行跟踪、分析、研究,国外陀螺仪的发展及应用情况如图2所示。

图2 陀螺仪的发展及应用情况Fig.2 Development and application of gyro
由图2可知,国外陀螺仪精度范围覆盖1.5× 10-5(°)/h~3600(°)/h。传统的机械陀螺仪仍是当前实际应用中精度最高的陀螺,主要用于战略武器,如自对准战略导弹、自主潜艇;光学陀螺技术已成熟,在部分应用中大有取代传统机械陀螺的趋势,主要用于导航级和战术级武器,如巡航导弹、海陆空的导航与测量、拦截机及姿态航向参考系统等;MEMS陀螺则主要用于一些低精度军用和民用应用。
2.1 激光陀螺
自1975年美国霍尼韦尔公司研制出机械抖动偏频激光陀螺工程样机,激光陀螺真正进入了实用阶段,并于20世纪90年代全面投入使用,激光陀螺的部分产品如表1所示。

表1 激光陀螺部分产品Table 1 Products of laser gyro
目前,激光陀螺统治着机载这一领域,西方发达国家的军用和民用飞机大多采用环形激光陀螺作为惯性导航的核心部件。在军用领域,美军F-14、F-15A/B/C/D、F-16、F/A-18、F-22、F-35等各型战斗机、F-117隐形轰炸机、B-52H轰炸机、KC-135空中加油机和美海军陆战队的AH-1W武装直升机、美陆军的AH-64“阿帕奇”武装直升机等均采用环形激光陀螺捷联惯导系统;在民用领域,波音公司的737以上机型、空客公司的A300/310/320/330/340等飞机、麦道公司的MD-11/80以及空客A380飞机均采用环形激光陀螺捷联惯导系统。
在航海领域,目前的激光陀螺惯导系统主要有霍尼韦尔公司的SLN型舰用激光陀螺导航仪、诺格公司利铁夫公司的PL41 MK4型舰船惯性导航系统、诺格斯佩里航海公司的MK39系列和MK49船用环形激光陀螺惯性导航系统、诺格公司AN/WSN-7A、AN/WSN-7B激光陀螺惯性导航系统、基尔福特公司的KN-5051惯导系统、罗克韦尔国际公司的RLGN环形激光陀螺导航仪以及萨基姆公司基于西格玛40的萨基姆导航系统。一些攻击型潜艇和航空母舰,如法国凯旋、梭鱼、红宝石和AIP潜艇以及戴高乐号航母等采用的是萨基姆导航系统,美海军使用的则是诺格公司的AN/WSN-7导航系统。
在导弹及制导弹药领域,战斧巡航导弹BlockⅡ、BlockⅢ型号使用的是诺格公司的LN-100G激光捷联惯导系统,BlockⅣ配备了霍尼韦尔公司的HG9848激光捷联惯导系统;波音公司生产的联合攻击制导武器杰达姆装备由霍尼韦尔公司提供HG1700惯性测量单元。2016年8月,洛马公司成功完成集成了GPS/惯性导航系统的新型“双模加”激光制导炸弹飞行试验,验证了其光学、GPS/惯性制导系统以及姿态控制系统的性能。2016年9月又获得美国空军授予的价值8760万美元合同,将继续生产包括GBU-10和GBU-12在内的“宝石路”双模+激光制导炸弹的激光制导套件和气动控制尾翼。2017年3月,该公司又推出一种采用惯性导航系统/GPS导航系统的新型双模+激光制导炸弹。
目前,激光陀螺及相应的系统主要用于中高精度的应用。当前的研究重点是降低成本和小型化,美国和欧洲的一些国家都投入资金,对激光陀螺进行研究。据军事宇航2016年3月报道,美国国防后勤局陆海分部授予霍尼韦尔公司宇航分部一项合同,为美海军AN/WSN-7(V)海上导航系统研制环形激光陀螺仪,合同为期3年,金额3890万美元,这批陀螺仪将作为美国海军水面舰艇和潜艇导航系统的配件,预计2021年完成。
2.2 光纤陀螺
1996年以后,全固态结构、全数字、低功耗的光纤陀螺在国外进入工程应用阶段。此后,国外大量研究机构致力于光纤陀螺的研究与开发,典型的有美国霍尼韦尔公司、诺格公司、KVH公司,以及俄罗斯、法国、日本等国家的一些公司,部分产品如表2所示。
霍尼韦尔公司一直致力于干涉式光纤陀螺和谐振型光纤陀螺的研究,典型产品有导航级Spirit惯性测量单元与战略级高性能太空光纤陀螺HPSFOG,其中的Spirit惯性测量单元2016年仍有3个交付计划。该公司还研制了一种新型高精度干涉型光纤陀螺,专为地球和科学遥感而设计,零偏稳定性优于1×10-4(°)/h,角度随机游走达5×10-5(°)/h 。图3为霍尼韦尔公司的部分惯性产品。诺格公司也不曾间断对惯性产品的研究,图4为该公司基于光纤陀螺的惯性产品时间轴,图5为部分产品相关参数。据诺格公司官网报道,截至2016年,该公司向200多个用户交付了30000部LN-200惯性测量装置。作为光纤陀螺的重要厂商之一,KVH公司取得了巨大进步,从大型低性能光纤陀螺发展到了紧凑型光纤陀螺及光纤陀螺惯性导航系统。2009年KVH第一个使用新型光纤Thinber紧凑型光纤陀螺DSP-1750,角度随机游优于DSP-3000近5倍,偏置稳定性优于KVH DSP-3000近8倍。2016年,该公司还推出基于DSP-1750的新型三维同步卫星光纤陀螺惯性导航系统和双惯性导航系统。这些产品可为要求苛刻的无人、自主以及载人空中、地面、海洋和地下平台(如海底遥控车和采矿系统)提供全面定位与导航功能应用。此外,典型光纤陀螺产品还有iXblue公司的光纤惯性导航系统Phins C3、C5、C7系列,以及2016年6月宣布推出基于高性能光纤陀螺技术的Phins Compact光子惯性导航系统;俄罗斯的太空级光纤陀螺VOBIS-1和VOBIS-2;日本三菱精密有限公司的干涉型光纤陀螺MFG-200、MOD-Π,以及广泛用于小型卫星的TA7584。

图3 霍尼韦尔公司导航与惯性传感器组合Fig.3 Honeywell’s navigation and inertial sensing portfolio

图4 诺格公司基于光纤陀螺产品时间轴Fig.4 Fiber optic gyro based inertial product timelines grouped by product category

图5 诺格公司基于光纤陀螺的部分产品Fig.5 Northrop Grumman fiber gyro based products
目前在航海领域,一些攻击型核潜艇和航空母舰如阿联酋汉纳级导弹艇、英国伊丽莎白女王级航母、法国新型防空护卫舰等都已经选定iXblue公司基于光纤陀螺的MARINS惯性导航系统。一些小型水下航行器也已使用光纤陀螺惯导系统,如KVH公司为美海军MK 54型鱼雷提供基于光纤陀螺的TG-6000型惯性测量单元,法国iXBlue公司推出的用于水下机器人的高性能光纤陀螺惯性导航系统ROVINS NANO和基于高性能光纤陀螺的Phins Compact光子惯性导航系统。
在航空领域,2016年,诺格公司的LCR-100姿态航向参考系统用于神经元无人机试飞并获得成功,LCR-100N导航设备将确定用于比奇空中国王特种飞机。随着诺格公司以高精度光纤陀螺为重要标志的LN-251惯导系统研制成功后,又相继推出了适应飞机导航的LN-260和适应陆用的LN-270系列化产品。其中,LN-260被美空军选定为F-16多国战斗机机群进行航空电子设备更新,用于F/A-18E/F“超级大黄蜂”和EA-18G“咆哮者”战斗机的光纤惯性导航系统样机也正在研制中。
中级干涉型光纤陀螺目前在各种太空应用中使用,如日本用于HODOYOSHI卫星系列的TA7584。2014年9月,俄罗斯成功发射的地球同步轨道通信卫星Luch使用的太空级光纤陀螺VOBIS-1和VOBIS-2,零偏稳定性优于0.03(°)/h。
2.3 MEMS陀螺
MEMS惯性传感器主要用于中低精度领域,其研究和生产主要集中在美国,许多惯性器件研究机构及公司推出了工业化产品。典型代表有亚诺德半导体公司的ADI16136陀螺仪、InvenSense的高精度陀螺仪MPU-3300、挪威英飞凌(SENSONOR)公司的STIM300陀螺仪、角斗士技术公司的陆标系列组合导航系统、Crossbow公司生产的NAV440型组合导航系统和荷兰XSENS公司的MTI-G-700微型惯性测试系统等,如表3所示。
由于MEMS惯性器件具有体积小、成本低、环境适应性强、易于大批量生产和产业化等优点,目前已广泛用于军用和民用领域。在军用领域,微机电产品目前主要集中于中低精度领域,如无人机、航空制导炸弹、制导炮弹、制导弹药等的导航系统。典型产品有霍尼韦尔公司的HG1900、HG1930系列,目前已知的应用载体包括联合直接攻击弹药、雷神亚瑟王神剑制导炮弹以及基于HG1930的IGS-2××、IGS3××系列硅微惯性/卫星组合导航系统。在民用领域,微机电产品主要集中于汽车和消费领域的应用。在车辆领域的应用有导航辅助、检测冲击等;在消费领域的应用有游戏机、智能手机、无人机、照相机、虚拟现实头盔等。
MEMS惯性技术目前仍是研究热点。美国DARPA微系统技术办公室自2015年5月就开始征集“精确稳定惯性弹药导航:先进惯性微型传感器”(PRIGM:NGIMU)项目提案,旨在开发不依赖外部导航(如GPS)的制导弹药精确导航。2016年分别与诺格公司和休斯研究实验室签订合同,开发基于微机电的抗振动、抗冲击的惯性传感技术。其中要求诺格公司不仅要验证其微机电陀螺仪和加速度计是否满足性能及环境要求,同时还追加了530万美元MEMS惯性测量单元的研制合同,用于评估LR-500是否满足尺寸、质量、功率及性能参数要求。休斯研究实验室计划把一个哥氏振动陀螺的微机电传感器与一个极精准原子钟的基准频率同步,利用原子超精细跃迁频率的精确性,实现不依赖GPS的惯性传感器技术。霍尼韦尔公司一直致力于开发比现有HG1930IMU高3个数量级的精确IMU技术。2016年10月也与DARPA签订合同,关于进一步开发下一代精确惯性技术。通过与DARPA合作,霍尼韦尔公司将在惯性传感器的设计和制造中融入微机电技术,进一步实现陀螺仪和加速度计的小型化,提高IMU的性能,降低其功耗,以提供具有更高精度和更低成本的精确导航解决方案。
2.4 原子陀螺
原子陀螺作为一项新型前沿技术,目前仍处于研究阶段,技术原理成熟,主要是小型化和集成化问题。原子陀螺可分为核磁共振陀螺、无自旋交换弛豫(SERF)原子自旋陀螺和原子干涉陀螺3类,其特点如表4所示。其中,核磁共振陀螺具有高精度、小体积、低功耗和低成本等优点,并正在向芯片级尺寸、战略级精度发展,目前样机的零偏稳定性已达0.01(°)/h(1σ)的水平。
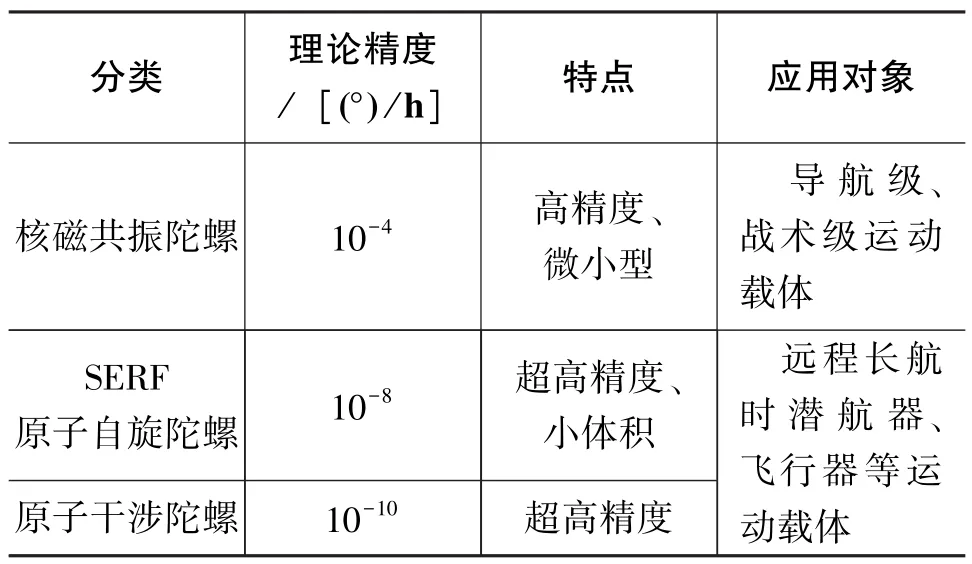
表4 原子陀螺的分类与特点Table 4 Classification and characteristics of atomic gyro
美国将基于冷原子干涉技术的原子惯性仪表技术视为下一代主导型惯性仪表。2016年,DARPA分别与物理科学公司、光电波公司、休斯研究实验室以及Draper实验室签订合同,启动“高稳定性原子钟”项目,为开发用于不依赖GPS原子导航仪的高精度原子陀螺奠定技术基础。随着原子陀螺一系列工程化难题的逐步解决,原子陀螺将成为下一代高精度惯性导航系统的核心传感器。
3 惯性技术在无人系统的应用
天上的卫星、导弹、飞船、无人机,地面的无人车、机器人,海里的无人船、潜航器……伴随着惯性技术、人工智能、遥感测绘等的发展,越来越多的无人系统应运而生。在军用领域,无人系统正全面向实战应用方向迈进,特别是智能化的武器装备,凭借其非接触、无人化、自主性的优势,将在一定程度上影响现代战争的作战理念和作战方式。在民用领域,无人系统广泛应用到公共安全、制造、交通、通信等众多行业,应用范围不断扩大。由于惯性技术具有自主连续、全方位、全时空、不受外界干扰等优点,因此,广泛用于无人潜航器、无人车、无人机、无人飞船以及机器人等各类无人系统中。
水下无人系统因造价低廉、隐蔽性强等诸多优点而得到大力发展,美国等已制定各类水下无人作战系统发展规划并开发出便携型、轻型、重型和巨型等多种水下无人作战系统,并向着提高智能化、模块化和标准化程度、拓展多平台搭载使用能力等方向发展,而惯性技术在其中发挥着重要作用。美海军的MK 54型鱼雷、美金枪鱼机器人公司的“可靠”号自主式水下航行器、Hydroid公司的REMUS 100无人水下航行器皆采用光纤陀螺惯性导航系统,实现水下航行。2016年,法国iXBlue公司推出了用于水下机器人的高性能光纤陀螺惯性导航系统ROVINS NANO和基于高性能光纤陀螺的Phins Compact光子惯性导航系统。
无人驾驶汽车已成为无人驾驶系统中发展最快的领域之一,交通专家、汽车制造商以及工程师们都预测未来无人驾驶汽车将司空见惯。2016年,KVH公司宣布为无人驾驶汽车推出基于光纤陀螺低成本传感器,同时还将引入开发人员的工具包,以支持基于光纤陀螺的传感器在无人驾驶汽车上的应用和测试。美国福特公司的自动驾驶汽车、新加坡动力公司的耶格系列无人车采用惯性技术实现导航功能。
无人机具有用途广泛、成本低、无人员伤亡风险、生存能力强、机动性能好和使用方便等优点,在现代战争中有极其重要的作用,在民用领域更有广阔的前景。在军用领域,如RQ-4A/B全球鹰无人机、MQ-9A死神无人机、MQ-4广域海上监视无人机等均采用GPS全球定位系统和惯性导航系统。2016年,巴西FT-200FH无人直升机、美国神经元无人机均选定采用诺格公司的光纤导航设备。在民用领域,无人机可用于城市环境执行危险的巡逻任务或救援队开展灾难营救行动。2016年,DARPA启动轻量自主项目(FLA),通过发展全新算法使小型无人机在无操作人员遥控信号和GPS信号介入的情况下,仅凭借自身携带的高分辨度摄像机、激光雷达、声纳或惯性测量单元,便可在房间、楼梯、走廊或其他设障环境中执行自主导航飞行等低等级的任务。
就航天领域而言,用于美国天基红外系统第五颗地球同步卫星、韩国阿里郎二号地球同步卫星和德国SARah星基雷达侦察系统导航的都是诺格公司基于半球谐振陀螺的可扩展空间惯性参考单元(SIRU),赛峰公司目前为欧洲航天局下一代运载火箭阿丽安娜-6开发的SpaceNaute惯导系统也是以半球谐振陀螺为基础,而小型卫星如LM 300卫星使用的则是光纤惯性测量装置。
4 结论
惯性传感器的发展情况直接决定了惯性系统的开发和应用,惯性传感器自身的成本、体积和功耗影响着惯性系统的相应参数指标。就全球发展现状而言,现有惯性传感器可以满足当前各种不同导航任务的指标要求,未来的主要目标是提高精确性、连续性和可靠性,降低器件的成本、体积/质量、功耗等。光学陀螺技术已经成熟,研究重点是提高精度和降低成本;MEMS技术的发展使得惯性技术在民用市场发展迅速,惯性器件不断向轻量化、小型化和微型化方向发展,新技术的出现也将使得一些新型的惯性传感器用肉眼无法识别。
[1]张炎华,王立端,战兴群,等.惯性导航技术的新进展及发展趋势[J].中国造船,2008,49(S1):134-144.ZHANG Yan-hua,WANG Li-duan,ZHAN Xing-qun,et al.The new advancement and trend of inertial navigation technology[J].Shipbuilding of China,2008,49(S1):134-144.
[2]Sanders G A,Sanders S J,Lee K S,et al.Fiber optic gyro development at Honeywell[C].SPIE Commercial+ Scientific Sensing&Imaging,2016:985207.
[3]Pavlath G A.Fiber optic gyros past,present,and future[C].22ndInternationalConferenceonOpticalFiber Sensors,2012.
[4]Napoli J.20 years of KVH fiber optic gyro technology[C].SPIE Commercial+Scientific Sensing&Imaging,2016:98520A.
[5]Korkishko Y N,Fedorov V A,Prilutskiy V E,et al.Fiber optic gyro for space applications-results of R&D and flight tests[C].IEEE International Symposium on Inertial Sensors and Systems,2016.
[6]Bergh R A,Arnesen L,Herdman C.Fiber optic gyro development at fibernetics[C].SPIE Commercial+Scientific Sensing&Imaging,2016:98520E.
[7]Mitani S,Mizutani T,Sakai S.Current status of fiber optic gyro efforts for space applications in Japan[C].SPIE Commercial+Scientific Sensing&Imaging,2016:985208.
[8]Divakaruni S P,Sanders S J.Fiber optic gyros:a compelling choice for high precision applications[C].18thInternational Optical Fiber Sensors Conference,2006.
[9]Rozelle D M.The hemispherical resonator gyro:from wineglass to the planets[C].Proceedings of 19thAIAA Space Fight Mechanics Meeting,2009,134:1157-1178.
[10]Lynch D D.HRG development at Delco,Litton and Northrop Grumman[C].Proceedings of the Anniversary Workshop on Solid-State Gyroscopy,2008:19-21.
[11]Benedict O.The SiREUS MEMS rate sensor program[C].Proceedings of the 59thInternational Astronautical Congress,2008.
[12]Wang W,He S.Development of MEMS inertial instrument technology[J].Missiles and Space Vehicles,2009,29(3):23-28.
[13]Sharma A,Zaman M F,Zucher M,et al.A 0.1(°)Hr bias drift electronically matched tuning fork micro-gyroscope[C].Proceeding of the 21stIEEE International Conference on MEMS,Tucson,USA,2008:6-9.
[14]Durfee D S,Shaham Y K,Kasevich M A.Long-term stability of an area-reversible atom-interferometer Sagnac gyroscope[J].Physical Review Letters,2006,97(24):240801.
[15]Shkel A.The chip-scale combinatorial atomic navigator[J].GPS World,2013,24(8):8+10.
[16]IXSEA military fiber optic gyroscope technology,navigation sensor systems[EB/OL].http://www.armedforces-int.com/Suppliers/Ixsea.html,2012.
[17]Products of fiber-optic inertial navigation systemOMEGA in the state research center of the Russian Federation-Concern CSRI Elektropribor[EB/OL].http://www.elektro pribor.spb.ru/prod/rmiins,2012.
[18]Aggarwal P,Syed Z,El-Sheimy N.Hybrid extended particle filter(HEPF)for integrated civilian navigation system[C].Proceedings of the 2008 Symposium on Position,Location,and Navigation,Monterey,CA:IEEE,2008:984-992.
[19]Wang L,Zhan X,Zhang Y,et al.Strapdown relative inertial navigation system design for a lunar rover[C].Proceedings of SPIE,2ndInternational Conference on Space Information Technology,2007:67953Q.[20]Zhao X,Wei J,Zhai L,et al.Improved ambiguity function method based on analytical resolution for GPSattitudedetermination[J].Measurement Science&Technology,2007,18(9):2985-2990.
Development and Review of Foreign Inertial Technology in 2016
XUE Lian-li1,CHEN Shao-chun1,CHEN Xiao-zhen2
(1.Beijing HIWING Scientific and Technology Information Institute,Beijing 100074;2.Beijing Institute of Aerospace Control Devices,Beijing 100039)
Based on the research and application of inertial technology,this paper reviews the development of inertial technology in 2016.The paper summarizes the current research status and application of inertial sensor and inertial system,and prospects for the future development of inertial technology.
inertial technology;inertial navigation;fiber optic gyro;MEMS gyro
U666.1
A
1674-5558(2017)07-01400
10.3969/j.issn.1674-5558.2017.03.018
薛连莉,女,硕士,航空宇航科学与技术专业,助理工程师,研究方向为导航、制导与控制。
2017-04-24