一种高精度多路温度采集方法研究
2017-06-10马一通王二伟
马一通,王二伟,张 浩
(北京航天控制仪器研究所,北京100039)
一种高精度多路温度采集方法研究
马一通,王二伟,张 浩
(北京航天控制仪器研究所,北京100039)
惯性平台系统是一种框架系统,主要包括平台本体、电路箱和电源箱。平台系统精度主要靠安装在平台本体的三浮陀螺和加速度计来保证。通常惯性平台的工作环境比较严酷,惯性传感器对温度有很高的敏感度,在系统正常工作时,平台内部有二级温控来保证仪表有良好的工作环境,但内部空间温度梯度变化会影响惯性传感器的精度。在温度采集过程中,铂电阻存在非线性、自热效应及热电动势等电气干扰的精度影响。采用阻值比较法,通过引入恒定激励电流来抑制温度采集电路的自热效应,并基于FPGA设计并行多通道温度采集电路。给出了系统总体设计方案、测温电路参数设计、序列激励电流控制和数字滤波补偿的具体实现方式,测试结果表明该系统可实现64路温度采集,在一定范围内测温精度能达到±0.02℃,满足精度要求。
惯性平台;温度采集;FPGA;LabView
0 引言
在惯性平台系统中,一般要求惯性仪表在固定的环境温度下能正常工作,而在地面模拟导航、自标定和自瞄准时,本体转位过程中会引起仪表所处环境的温度波动。这样仪表的输出精度就发生了变化,进而影响到整个平台系统导航精度。
为了减小平台内温度变化对于精度的影响,需对惯性仪表温度敏感项的参数进行补偿。在平台温度场模型建立的仿真阶段,需要对仪表关键位置进行温度测量。在平台系统温度补偿的测试阶段,实时对陀螺关键位置的温度信息,发送给计算机进行温度计算。随着惯性平台系统需求量的提升,要求仪表生产、测试有较高的效率。在惯性平台的生产测试阶段,要做温度场实验,也要对平台系统内部环境温度进行检测。因此,设计高精度、宽范围、多通道温度自动测量系统对于陀螺加速度计和整个平台系统的研发、设计、测试、生产具有重要的意义。
本文基于惯性平台仪表的温度敏感点,设计了用于惯性平台温度场有限点测试的多路温度采集方案,完成了惯性平台在地面模拟导航、自标定和自瞄准过程中仪表周围的多点温度测试,为陀螺及加速度计参数的精度补偿提供了有效测试数据支撑。
1 多路测温总体方案
平台温控系统应用于惯性平台系统,主要对平台台体、陀螺和陀螺加速度计等惯性仪表进行恒温控制,为惯性仪表提供最佳的工作温度环境,以提高惯性仪表及平台系统的使用精度。平台台体的恒温点为+60℃±1℃,温控点波动量精度为±0.5℃;在仪表周围环境温度稳定的条件下,仪表温控电路(包含传感器)实现以下温控精度:温控点±0.3°C,波动量≤0.03°C。在精度实验攻关过程中,需要对平台内部空间进行温度监测,空间温度采集方法如图1所示。

图1 空间点温度采集方法Fig.1 Method of temperature-point sampling
2 多路测温电路的设计与实现
2.1 多路测温切换原理
多路温度采集模块完成对多个温度测量点的温度检测,并转换为数字量传送给FPGA。以铂电阻温度传感器和精密电阻设计温度检测电路,多通道选择开关选择对应的铂电阻接入温度检测电路,将相应铂电阻传感器的信号送入A/D转换器,A/D转换器将温度检测电路输出的模拟信号转换为FPGA能识别的数字信号。测温系统硬件原理如图2所示。
8片模拟选择开关ADG658对64个铂电阻进行切换,每片ADG658为8路单通道选择开关;另外8片模拟选择开关ADG658对8路AD7793输出的恒流源进行切换;8片AD转换芯片AD7793对64个铂电阻进行循环模拟量采集;1路RS-422串口传递采集到的温度数据。

图2 测温系统原理框图Fig.2 Structure of the temperature sampling system
2.2 高精度温度采集原理
1)温度传感器。本设计采用阻值比较法进行温度测量,AD输出的恒流源通过温度传感器铂电阻与精密电阻,由于通过两者的电流相同,铂电阻温度的阻值可由两者的比值乘以精密电阻的阻值算出。恒流源的输出不要求重复性和长期稳定性,只要在通道切换的短时间内激励电流未改变,就可消除激励电流对温度测量的影响,具体如图3所示。在温度检测电路中精密电阻选用精度为0.01%,温漂为1×10-7,标称阻值为1kΩ的精密电阻,当环境温度变化小于30℃时,精密电阻的温漂引入误差小于0.001℃。在精度测量时,铂电阻引线电阻对温度测量的影响不可忽略。铂电阻的引线连接方式包括两线制、三线制和四线制,这里选取两线制,由此引起的误差将在后续分析。

图3 FPGA测温切换原理图Fig.3 Connection of FPGA hardware
2)A/D转换器。AD7793是ADI的一款高性能Σ-Δ型,包含同步串行SPI接口的24位A/D转换器,它的最高有效分辨率可以达到23位。本设计采用外部2.5V参考电压源,内置增益运算放大器,AD采集更新三浮选123Hz。高精度的AD7793不仅保证了温度测量精度,而且内部集成了低噪声仪表运算放大器、激励恒流源、校准寄存器,使外围电路简化。
多路温度采集电路板如图4所示,所有芯片采用小封装且双面布置来减小印制板面积,缩短恒流源走线,以减小路径阻抗。

图4 硬件实物图Fig.4 Hardware of test system
2.3 测温精度分析
多路温度采集系统的器件主要包括:测温铂电阻Pt1000、ADG658八路单通道模拟开关、AD7793模拟数字信号转换器、XC3S200AN可编程逻辑门阵列。
1)温度采集电路。本系统采用的两线制的铂电阻线径0.7mm、最长50mm,实测内阻≤0.08Ω。常用的Pt1000铂电阻温度传感器的电阻变化率为3.851Ω/℃,铂电阻温度传感器的引线电阻会产生小于0.02℃的误差。
2)模拟开关切换电路。ADG658的漏电流仅为5pA,而恒流源的输出为420μA。ADG658的导通电阻为2.5Ω,而AD7793的输入阻抗超过1GΩ,因此可以忽略多路复用器ADG658的漏电流和导通电阻对温度测量精度的影响。
3)A/D转换电路。当温度变化0.001℃时,铂电阻两端的电压值变化2μV,经AD内置运算放大器将模拟信号放大4倍后为8μV,当AD的输出更新三浮为123Hz时,最小分辨电压为3.4μV,小于6.4μV,满足分辨率0.02℃的要求。
3 系统软件设计与实现
3.1 温度采集模块软件设计
温度采集模块的FPGA硬件描述语言功能模块包括:同步复位分频、AD配置及转换、通道切换、阻值和温度换算、平均滤波、串行数据发送,RTL如图5所示。
FPGA要从AD7793中正确地读取A/D转换值,首先要进行初始化操作。AD7793的初始化主要是对SPI接口时序的初始化,以及对AD7793内部寄存器的配置。A/D转换器AD7793是通过同步串行接口SPI协议与FPGA进行通信的,状态关系转移图如图6所示,硬件描述语言功能仿真如图7所示。

图5 硬件描述语言RTL图Fig.5 Simulation of parallel bus

图6 A/D转换的VHDL状态转移图Fig.6 State machine of A/D transform
数据采集程序先采集精密电阻的数据,然后通过模拟开关选择各通道铂电阻温度传感器接入AD7793的模拟输入通道,采集各通道温度传感器的数据。由于设置AD7793的数据更新三浮为39μs,需要的A/D转换时间为42ms,当模拟开关选择通道改变时,进行50ms的延时,使读取结果为模拟输入信号稳定后的A/D转换值。数据采集程序采集温度传感器的阻值保存在一个全局数组变量中,通过全局变量传递给数据处理模块。

图7 硬件描述语言的功能仿真图Fig.7 Simulation of sampling operation
3.2 温度数字滤波及曲线拟合
由于环境温度不会产生突变,为了抑制随机高频噪声对温度测量精度的影响,采用平均滤波对采集的数据进行滤波;受到铂电阻和A/D转换器的非线性的影响,铂电阻的测量值与实际的温度值在上位机采用最小二乘法进行温度曲线拟合。
理论上系统可以通过读取A/D转换器两个通道的转换值,计算出接入铂电阻的阻值。但由于计算中使用的精密电阻的阻值与实际阻值存在误差,以及由于多通道模拟转换开关漏电流和导通电阻等因素的影响,计算出的阻值与实际铂电阻的阻值会存在误差。为了消除电子元器件等因素引入的误差,本系统使用测量值进行温度曲线拟合。具体实现方法为:在温度测量20℃~90℃的范围内,每隔2℃使用高精度温度校准仪模拟输出铂电阻在不同温度下的电阻值,将高精度温度校准仪的输出代替铂电阻温度传感器接入温度测量系统进行测量。为了减少系统的运算量,在进行拟合前不进行温度换算,只通过读取两个通道的A/D转换值测量出电阻值,然后使用测量的电阻值与实际的温度值进行温度曲线拟合。
3.3 通信模块软件设计
多路温度采集系统的上位机平台用NI公司的LabView软件开发,主要包括温度数据接收、数据分析预处理、结果显示及存储3部分,如图8所示。
1)温度数据接收。采集计算到的温度数据流经过RS422发送到串口板卡,通过上位机的LabView软件可以实时监测平台内部的温度。通信协议:分别以帧头识别不同位置的温度数据,为保证数据正确性,进行CRC的数据校验。通信三浮:完成64路温度测试所需时间。AD采集完成一路的时间为0.8ms,6路并行采集,每一路进行8通道依次切换,所以测试一次的时间为0.5s。串口波特率为921.6Kbps。
2)数据分析预处理。本文对温度的标定及计算在采集板的FPGA内部实现,温度标定和温度曲线拟合的控制指令通过上位机下发,上位机串口板卡程序如图9所示。由于测量的温度数据为浮点型,而串口不能以浮点数据发送,测量温度的分辨率为0.005,需要温度数据小数点后保留3位,将温度数据乘以1000后,可以将温度数据转换为整型数据。

图8 温度采集与存储Labview框图Fig.8 Structure of temperature data getting and saving

图9 软件显示存储前面板Fig.9 GUI of the program
3)结果显示及存储。仪表温度控制系统实际用到的测温电阻仅有4个测试点,不能完全反应仪表内部的温度分布情况。为进一步了解平台内部温度场分布情况,实现仪表在实际工作条件下温度场分布的均匀性,本设计中将串口板卡收到的温度数据相对应的仪表位置显示并进行记录。当串口接收到数据后会产生接收数据事件,接收数据程序将串口缓存中的数据读取至温度数据缓存中,然后判断温度数据缓存中的数据是否有与协议符合的一段数据,并计算温度值。读取温度数据后,清理相应的缓存区,然后保存温度数据至数据文件中。同时,将测试点位置分布间距、量程范围、精度范围等常用参数连接至前面板。
针对本设计中较大的数据量,温度采样速度较低的特点,选用TDMS格式数据文件对数据存储,且对温度数据添加时间轴,这为软件操作人员使用和后期分析温度数据的空间分布提供便利。
4 测试数据验证
(1)温度曲线显示验证
如图10所示,表示某一固定位置仪表的温度数据波动。
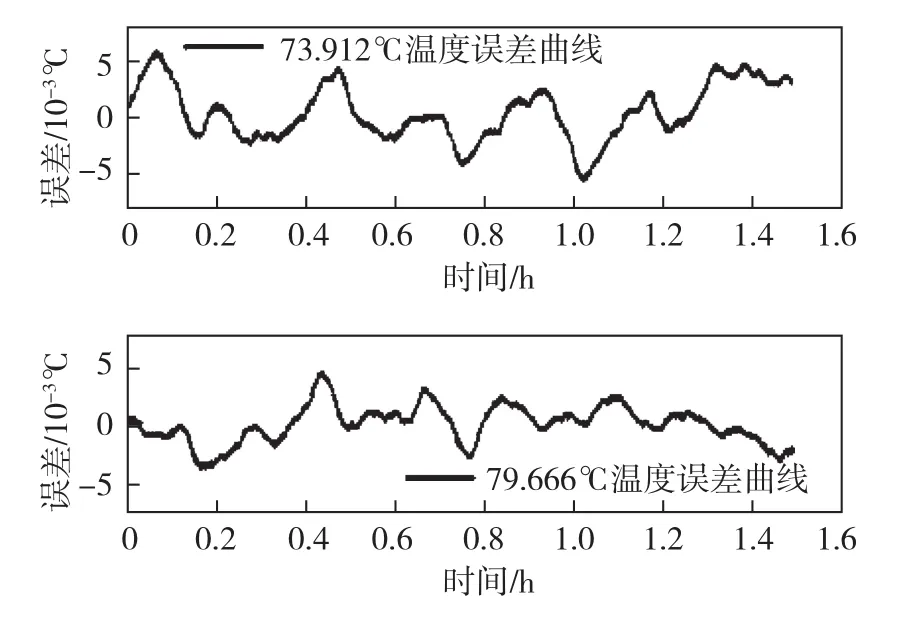
图10 温度误差曲线Fig.10 Curve of the temperature deviation
如表1所示,根据测试结果可得出台体及仪表的温度控制效果,为控制系统偏移补偿提供参数;可根据仪表周围温度分布为仪表温度模型建模提供数据支持;可根据温度控制较差点进行分析,调整台体加热功率的分布;分析仪表工作温度的线性度,为提高陀螺精度提供有效测量参数。

表1 温度单点1h测试结果Table 1 Test results of temperature in an hour
(2)测温系统测量精度验证
温度测量系统各个通道除铂电阻温度传感器外,各个通道的温度信号都经过同一个器件,现以单通道测量的温度数据进行精度验证。固定电阻的阻值可以通过Agilent 3458A型高精度万用表测量得到,查找铂电阻的分度表可以得到对应的实际温度,通过测量的温度值与实际值比较验证温度测量精度。Agilent 3458A对10K以下的阻值测量精度能达到0.005Ω,对应的温度约为0.00026℃,能达到0.02℃温度测量精度的验证。
5 结论
本文使用精密温度测量板和LabView上位机平台完成了空间温度测试,测试精度满足需求;开展了对现有温度采集系统的测温模块在硬件电路、测温补偿等方面的改进设计;完成了仪表工作环境中有限温度点的连续切换测试,为后续仪表温度漂移补偿提供有效数据。对于提高现有温控系统的测温精度、控温精度、抗干扰能力和稳定性以及最终提高整个惯性平台系统的精度具有重要意义。
[1]陆元九.惯性器件[M].北京:中国宇航出版社,1990.LU Yuan-jiu.Inertial device[M].Beijing:China Aerospace Press,1990.
[2]邓益元.静压液浮陀螺平台系统[M].北京:中国宇航出版社,2012.DENG Yi-yuan.Hydrostatic liquid-bearing gyro stabilized platform[M].Beijing:China Aerospace Press,2012.
[3]陈树学.LabView宝典[M].北京:电子工业出版社,2011.CHEN Shu-xue.LabView collection[M].Beijing:Electronics Industry Press,2011.
[4]马建国.FPGA现代数字系统设计[M].北京:清华大学出版社,2010.MA Jian-guo.Modern digital system design of FPGA[M].Beijing:Tsinghua University Press,2010.
[5]田耘,徐文波.Xilinx FPGA开发实用教程[M].北京:清华大学出版社,2008.TIAN Yun,XU Wen-bo.Developing practical course of Xilinx FPGA[M].Beijing:Tsinghua University Press,2008.[6]任爱峰.基于FPGA的嵌入式系统设计[M].西安:西安电子科技大学出版社,2005.REN Ai-feng.Embedded system design based on FPGA[M].Xi'an:Xidian University Press,2005.
[7]薛清华.高精度多通道温度测量技术研究[D].华中科技大学,2007.XUE Qing-hua.Research on high-accuracy multi-channel temperature measurement technology[D].Huazhong University of Science and Technology,2007.
[8]罗立成.光纤陀螺精密温度控制系统的设计及其研究[D].哈尔滨工程大学,2011.LUO Li-cheng.Research and designing of high-precision temperature control system for FOG[D].Harbin Engineering University,2011.
Research on the Multiple-channel Temperature Sampling Method
MA Yi-tong,WANG Er-wei,ZHANG Hao
(Beijing Institute of Aerospace Control Devices,Beijing 100039)
Inertial platform system is a framework system which consists of platform,circuit box and power box.The precision of platform system is influenced by inertial meters on platform body.Because of the temperature sensitivity about inertial meters,two zones of temperature control system is designed to ensure a fine working environment for the instrument,but temperature gradient of the platform internal space changes will affect the precision of system.The precision is affected by the nonlinear of platinum resistance,self-heating and thermoelectric interference.The method of resistance value comparison and constant excitation current is employed in this paper to overcoming the self-heating effect.Furthermore,the design of parallel acquisition for the multi-channel temperature was based on FPGA.This paper provides the system design methods for the temperature measurement through the realization of sequence current,compensation and digital filter.The testing results show that the 64 channels of temperature acquisition fulfills the accuracy requirements in a certain range can be realized.
platform inertial;temperature sample;FPGA;LabView
U666.12
A
1674-5558(2017)02-01320
10.3969/j.issn.1674-5558.2017.03.008
马一通,男,硕士,助理工程师,研究方向为惯性平台电路设计。
2016-09-07