航天器在轨微振动测量单元设计及地面标定技术
2017-01-11杨金禄孙永进赵振昊霍红庆
杨金禄,孙永进,赵振昊,霍红庆
(1.中国空间技术研究院 载人航天总体部,北京 100094;2.兰州空间技术物理研究所,兰州 730000)
航天器在轨微振动测量单元设计及地面标定技术
杨金禄1,孙永进1,赵振昊1,霍红庆2
(1.中国空间技术研究院 载人航天总体部,北京 100094;2.兰州空间技术物理研究所,兰州 730000)
针对航天器在轨微振动环境测量,文章分析了微振动的来源及其对空间科学实验和对地成像载荷的影响,设计了典型微振动测量单元,提出了微振动测量单元标度因数和偏值的地面标定方法,利用精测设备进行了地面测试验证,结果表明微振动测量单元各轴测量误差小于5×10-3g0,验证了微振动测量单元的设计和地面标定方法的正确性。
航天器;微振动;测量;标度因数;偏值;地面标定
0 引言
航天器在轨运行中,大气阻力、微重力梯度、潮汐力、太阳辐射压、航天器姿轨控推力、舱段对接和分离振动、航天员活动、航天器内部设备工作等因素,造成了在轨航天器的微振动环境,将对航天器精密有效载荷的工作和科学实验产生一定的扰动。根据扰动特性,可以将航天器在轨微振动分为准稳态加速度、瞬变加速度和振动加速度[1]。因此,有必要研制一套航天器在轨微振动测量单元,以实时获取在轨微振动数据。为了能够准确地测量在轨微振动,开展微振动测量单元的标定技术研究至关重要。
针对国际空间站在轨微振动环境的测量,美国NASA研发了航天器在轨微振动测量装置,主要包括空间加速度测量系统(SAMS-II)和高级微重力加速度测量系统(AMAMS)。其中:SAMS-II采用了 QA-3100石英挠性加速度传感器,其分辨率可达0.1 µg,可用于0.01~400 Hz频率范围的振动加速度和瞬态加速度测量[2];AMAMS采用微电子机械(MEMS)加速度传感器,其测量范围更广,包括准稳态、振动和瞬变的加速度测量。针对高精度光学载荷,欧空局研发了微振动测量系统,其带宽为0.5~1000 Hz[3]。我国从20世纪80年代中期开始致力于空间微振动的研究,研制了相关产品,用于返回式卫星的微振动测量;之后又针对空间微重力科学实验,研制了新型产品以用于载人飞船微振动环境的实时监测[4]。关于在轨微振动测量系统的地面标定方法,国内外研究主要集中于加速度传感器的标定,而对于微振动测量系统整体的标定研究和公开报道较少。
本文分析航天器在轨微振动来源及其对微重力科学实验载荷及高分辨率对地观测成像载荷的影响,设计研制在轨微振动测量单元,针对测量单元提出一种地面标定方法并开展标定评估。
1 航天器在轨微振动来源及影响分析
1.1 航天器在轨微振动来源
根据扰动特性可以将航天器在轨微振动分为以下3类[1]:
1)准稳态加速度,指频率不大于0.01 Hz的微重力加速度,其量值一般不超过10-6g0量级(其中g0为地球重力加速度)。其来源主要是大气阻力、微重力梯度、潮汐力、太阳辐射压等的变化。
2)瞬变加速度,指发生瞬时跳变的微重力加速度,其量值一般大于 10-4g0量级,持续时间为0.01~100 s。其来源主要包括姿轨控推力、舱段对接和分离振动、航天器内部设备工作、航天员活动等。
3)振动加速度,指时域变化表现为随机涨落、衰减振荡或稳态正弦响应的微重力加速度,其量值一般大于10-6g0量级,频率范围为0.1~100 Hz。其来源主要包括仪器设备的振动干扰以及航天器内部扰动所引起的结构动力学响应。
上述3种航天器在轨微振动中,准稳态加速度一般适用于大气阻力、高空地球重力场、电推进器推力等领域的评估研究,由于量值相比较小,因此对测量技术的要求很高,通常采用静电悬浮加速度计,并且需要进行在轨标校。由于瞬变加速度和振动加速度的量值或频率较高,相比准稳态加速度而言,对空间微重力科学实验和高分辨率对地成像载荷的影响较大,需要重点关注。
1.2 在轨微振动对航天器任务的影响
1)空间微重力科学实验
微重力环境是宝贵的空间资源,科学家利用空间微重力环境设计了流体、材料、生命等多种科学实验载荷。航天器在轨微振动水平则成为指导科学实验过程和评估科学实验结果的重要依据。以国际空间站为例,为了保障在轨微重力科学实验项目的顺利开展,专门设计了飞行模式,空间站在该模式下2类加速度的限值分别为[5]:
①准稳态加速度在载荷设备的中心,其量值不超过10-6g0;在垂直于轨道加速度矢量方向上的分量不超过0.2×10-6g0。
②单独瞬时干扰源引起的各轴瞬变加速度量值不超过10-3g0;多个瞬时干扰源综合作用时,各轴在任意10 s内的加速度积分不超过10-5g0·s。
③国际空间站规定了舱体与国际标准有效载荷机柜(ISPR)机械接口间的振动加速度限值:当振动频率范围在0.01~300 Hz之间时,在任意100 s内振动加速度的方均根值的极限如图1所示。
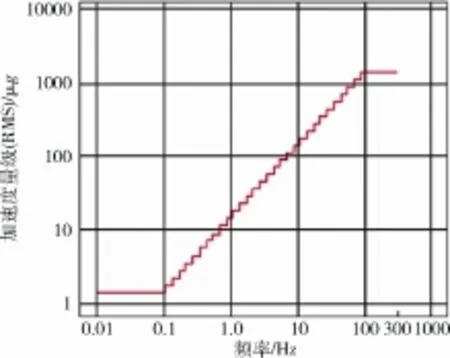
图1 国际空间站与ISPR接口间的振动加速度限值Fig.1 Limits of vibratory acceleration between International Space Station and ISPR
2)高分辨率对地成像载荷
航天器微振动会造成成像载荷与目标之间存在相对运动,使图像模糊不清,分辨率下降,甚至导致载荷无法成像。以Hymap成像光谱仪图像为例,图2(a)为无微振动扰动的原始成像;引入微振动扰动后,图像明显变模糊,如图2(b)所示[6]。

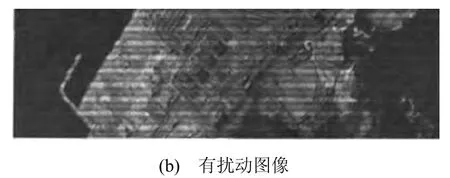
图2 Hymap成像光谱仪的图像数据Fig.2 Image from Hymap imaging spectrometer
目前成像载荷的指向精度一般要求小于1 µrad,部分载荷甚至要求达到0.05 µrad。干涉仪若受10-3g0以上的外部振动干扰,则可能丧失成像能力[6]。
2 微振动测量单元设计及测量模型
1)微振动测量单元
微振动测量单元一般由微振动传感器模块、控制与数据处理模块和地面数据处理模块组成,如图3所示。其中传感器模块选用技术较成熟的石英挠性加速度计,并构成三轴加速度传感网络;控制与数据处理模块用于对传感器采集信号的模数转换、数据初步处理以及与航天器平台的通信,接收控制指令并发送微振动数据;所采集的微振动数据经控制与数据处理模块及相关链路传输至地面,由地面数据处理模块进行计算处理,给出在轨微振动水平。同时,为了提高微振动测量单元的通用性并减少对航天器平台的约束,需完成传感器模块和控制与数据处理模块集成设计。

图3 微振动测量单元的组成及工作模式Fig.3 Configuration of the micro-vibration measurement unit and its working mode
微振动测量单元的关键部件是石英挠性加速度计,其性能直接影响测量单元整体指标。石英挠性加速度计由机械表头和混合集成电路共同组成,如图4所示。加速度计内部摆片用挠性梁支撑,以使加速度计在输入轴方向上的刚度极小(几乎为无约束的自由状态),但在其他轴向的刚度极大。因此,当加速度ai沿加速度计输入轴方向作用,且摆片位置发生变化时,则会导致差动电容传感器的电容值变化。此时,伺服电路检测到电容值变化并产生一个再平衡电流输入给力矩器,所产生的力矩又会使摆片回到初始位置。对流过采样电阻的电流进行测量,便可以得到石英挠性加速度计输入的加速度[7]。

图4 石英挠性加速度计原理Fig.4 Principle of quartz flexible accelerometer
2)测量模型
对于石英挠性加速度计来说,其加速度输出模型可表示为

式中:A为加速度计测得的加速度,g;U为加速度计输出电压,V;K0为加速度计的偏值,g;K1为加速度计的标度因数,V/g;K2为加速度计的二阶非线性系数,g/g2;ai为加速度计的输入加速度,g。
航天器在轨运行过程中,加速度扰动量值远小于石英挠性加速度计的量程,根据扰动量值范围可将加速度计测量范围限制在 10-2g0~10-1g0,在此范围内石英挠性加速度计输出模型可近似为线性关系,式(1)中的二阶非线性系数可忽略。则加速度输出模型为

由于微振动测量单元对石英挠性加速度计输出的电信号处理是模数转换的线性处理,而测量目标是获取输入加速度,所以微振动测量单元的测量模型可表示为

式中:ai为微振动测量单元的输入加速度,是待测量值;u为微振动测量单元输出的传感器信号数字量;k定义为微振动测量单元的标度因数;k0定义为微振动测量单元的偏值。
微振动测量单元的标度因数和偏值除了受石英挠性加速度计自身特性影响外,还与微振动测量单元整体电路设计、安装方式有关。影响标度因数的因素主要包括控制与处理模块中模拟电路处理增益及模数转换增益。影响偏值的因素主要包括传感器模块坐标系与测量单元本体坐标系的安装误差及控制与处理模块中模拟电路零偏。
3 微振动测量单元地面标定方法
为了获取航天器在轨微振动水平,将微振动测量单元安装于航天器内部,并且其本体坐标系应与航天器舱体坐标系保持平行。微振动测量单元测量得到各轴加速度输出值,再将输出值输入公式计算出测量单元的输入加速度,即航天器各轴在轨微振动水平。由式(3)可知,为了通过u计算出ai,需k(标度因数)和k0(偏值)已知即可,而k和k0仅与微振动测量单元及内部石英挠性加速度计自身特性有关。因此,需在地面对微振动测量单元进行标定试验,以获取标度因数和偏值。本文以典型微振动测量单元(三轴测量、测量范围±10-1g0)为例,设计一种实用的地面标定方法。
该标定方法是利用地球引力作用,通过改变微振动测量单元的倾斜角度来获得精确的输入加速度,如图5所示。

图5 微振动测量单元标定示意Fig.5 Schematic diagram of calibration method of microvibration measurement unit
由图5可得输入加速度为

式中βi为水平面和校准台面的夹角。
将式(3)代入式(4),可得

式中ui为夹角βi时微振动测量单元的数字量输出。
由式(5)可知,为了求得k和k0,只要获取 2个倾角即可求解方程组。但是,考虑到消除随机误差和评估测量模型线性度的需要,取微振动测量单元测量范围内的多个倾角输出结果进行拟合,最终可得出微振动测量单元的标定因数和偏值。按照线性拟合的要求,一般至少取7个等距测点,则由式(5)可得7组测点为

将式(6)进行拟合,得出系数k′和k0′,则微振动测量单元测量模型可写为

标定测试设备选用高精度分度转台。根据航天器在轨微振动水平,微振动测量单元的典型测量范围约为±10-1g0,则根据式(4),可得最大倾角约为6°。为了能够精确控制倾角,同时为保证标定的准确性,要求转台倾角误差应比微振动测量单元测量精度高1个数量级。
微振动测量单元用夹具固定在高精度分度转台上,为了验证标定的正确性及消除安装误差及偏值的非对称性,每轴采用摆态、门态、正和反共4种安装方式进行标定。微振动测量单元本体坐标系如图6所示。

图6 微振动测量单元本体坐标系Fig.6 Coordinates of micro-vibration measurement unit
具体标定方法如下:
1)调整高精度分度转台台面成水平状态;
2)安装微振动测量单元使y轴与转台旋转轴平行,z轴垂直向上;
3)连接微振动测量单元供电、数据输出电缆,做好数据采集准备;
4)分别转动转台至-6°、-4°、-2°、0°、2°、4°、6°,每个测点稳定后进行一次数据采集,采集时间不少于30 s;
5)对每个测点30 s的采集数据进行平均,按照式(6)进行排列,则得出一组待拟合测点数据;
6)对步骤 5)得出的测点数据进行拟合,得出系数k1′和k01′;
7)转动转台180°使z轴垂直向下;
8)重复步骤4)~6),得出系数k2′和k02′;
9)调整微振动测量单元安装方式,使z轴与转台旋转轴平行,y轴垂直向上,重复步骤4)~6),得出系数k3′和k03′;
10)转动转台180°使y轴垂直向下,重复步骤4)~6),得出系数k4′和k04′;
11)分别对上述4个标定因数和偏值取平均,得出x轴最终的标度因数和偏值;
12)按照上述步骤分别得出y轴和z轴的标度因数和偏值。
本文设计的微振动测量单元采用上述标定方法进行了标定测试,结果如表1所示,可见每种安装方式下拟合线性度均超过 0.999 9,摆态和门态一致性好,验证了标定方法的正确性。

表1 某型号微振动测量单元标定结果Table 1 Testing results of the calibration for a micro-vibration measurement unit
4 测试验证
为进一步验证微振动测量单元和地面标定方法的设计,对微振动测量单元进行地面测试。
1)基本原理
微振动测量单元可感知三轴微重力水平,由于地球重力加速度的存在,微振动测量单元在地面可对重力加速度在三轴的重力分量进行测量,得出微重力测量值。同时,利用精测设备对微振动测量单元坐标系与大地坐标系之关系进行精测,可计算出微重力理论值。将测量值和理论值进行比对,即可对微振动测量单元和地面标定方法进行验证。
2)验证方案
由于地面重力加速度远大于微振动测量单元测量范围,为防止测量值出现饱和,采用2种放置方法,即z轴向上、xy平面水平放置和y轴向上、xz平面水平放置。为了获得微振动测量单元与大地坐标系的关系,在微振动测量单元侧壁安装立方镜,如图7所示。利用光学经纬仪精测得到立方镜与大地坐标系之间的关系,进而得出微振动测量单元与大地坐标系之间的关系。为了减小测量误差,选用经纬仪测量精度为40″,此误差对各轴的微振动的影响约为2×10-4g0。具体验证方法如下:
①将微振动测量单元z轴向上、xy平面平置,放置稳定后利用上节的标定结果得出x轴和y轴的测量值,而z轴反向饱和。利用光学经纬仪测得的精测数据,计算得出x轴和y轴的微重力理论值。
②将微振动测量单元y轴向上、xz平面平置,放置稳定后利用上节的标定结果得出x轴和z轴的测量值,而y轴反向饱和。利用光学经纬仪测得的精测数据,计算得出x轴和z轴的微重力理论值。

图7 微振动测量单元与立方镜位置图Fig.7 Position of micro-vibration measurement unit and cubic mirror
3)验证结果
从表2中的测量值与理论值比对结果可看出,各轴测量误差小于5×10-3g0,这验证了微振动测量单元设计和地面标定方法的正确性。
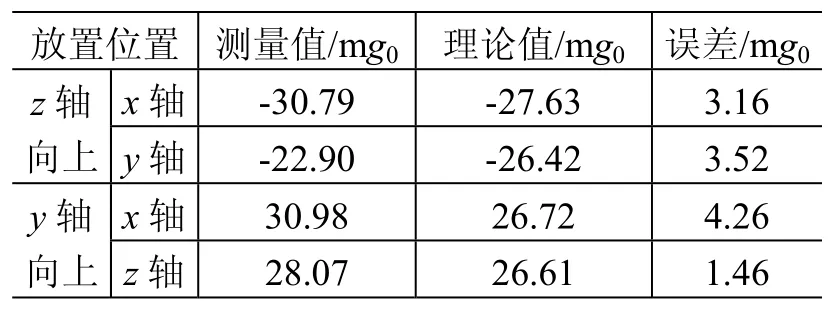
表2 某型号微振动测量单元验证测试结果Table 2 Verification testing results of the calibration for a micro-vibration measurement unit
5 结束语
航天器在轨微振动不可避免,其大小直接影响空间科学实验效果评价及对地成像载荷的分辨率。为测量航天器在轨微振动水平,设计了典型微振动测量单元,并提出测量单元的地面标定方法。通过测试结果验证,该标定方法能够准确获取标度因数和偏值,具有较高应用前景和工程价值。
(
)
[1]赵伟.航天器微振动环境分析与测量技术发展[J].航天器环境工程, 2006, 23(4): 210-214 ZHAO W.Analysis on micro-vibration environment of spacecraft and measurement technology[J].Spacecraft Environment Engineering, 2006, 23(4): 210-214
[2]JULES K, LIN P P, WEISS D S.Monitoring the microgravity environment quality on-board the International Space Station using soft computing techniques[R].[2016-04-22].http://www.ntrs.nasa.gov
[3]SICKER R J, THOMAS J.Advanced microgravity acceleration measurement systems(AMAMS) being developed[R].[2016-04-22].http://www.ntrs.nasa.gov
[4]薛大同, 雷军刚, 程玉峰, 等.“神舟”号飞船的微重力测量[J].物理, 2004, 33(5): 355-356 XUE D T, LEI J G, CHENG Y F, et al.Microgravity measurement of spaceships “Shenzhou”[J].Physics, 2004, 33(5): 355-356
[5]杨彪, 胡添元.空间站微重力环境研究与分析[J].载人航天, 2014, 20(2): 179-180 YANG B, HU T Y.Study and analysis of microgravity environment onboard manned space station[J].Manned Spaceflight, 2014, 20(2): 179-180
[6]王晓燕, 唐义, 唐秋艳, 等.卫星平台振动对色散型光谱仪光谱成像质量的影响分析[J].光谱学与光谱分析, 2011, 31(12): 3408-3409 WANG X Y, TANG Y, TANG Q Y, et al.Analysis of influence of satellite platform vibration on spectral imaging quality of dispersive imaging spectrometer[J].Spectroscopy and Spectral Analysis, 2011, 31(12): 3408-3409
[7]王珂.石英挠性加速度计偏值和标度因数稳定性研究[D].哈尔滨: 哈尔滨工程大学, 2012: 5-9
[8]薛大同.静电悬浮加速度计的地面重力倾角标定方法[J].宇航学报, 2011, 32(3): 689-693 XUE D T.On-ground calibration methods of electrostatically suspended accelerometers with gravity inclination[J].Journal of Astronautics, 2011, 32(3): 689-693
[9]王泽宇, 邹元杰, 焦安超, 等.某遥感卫星平台的微振动试验研究[J].航天器环境工程, 2015, 32(3): 278-284 WANG Z Y, ZOU Y J, JIAO A C, et al.The jitter measurement and analysis for a remote sensing satellite platform[J].Spacecraft Environment Engineering, 2015, 32(3): 278-284
(编辑:许京媛)
Design of on-orbit micro-vibration measurement unit and ground calibration method
YANG Jinlu1, SUN Yongjin1, ZHAO Zhenhao1, HUO Hongqing2
(1.Institute of Manned Space System Engineering, China Academy of Space Technology, Beijing 100094, China; 2.Lanzhou Institute of Space Technology Physics, Lanzhou 730000, China)
For the on-board micro-vibration of a spacecraft, the disturbance source and the micro-vibration effect on the space scientific experimental instruments and the earth-imaging payloads are analyzed.A typical configuration of the micro-vibration measurement unit is designed.A method of on-ground calibration for the scale factor and the offset value is proposed and verified by accurate alignment tests.The testing result shows that the measurement error in each axis is less than 5×10-3g0and the design and the calibration method are feasible.
spacecraft; micro-vibration measurement; scale factor; offset value; ground calibration
V441
:A
:1673-1379(2016)06-0680-06
10.3969/j.issn.1673-1379.2016.06.020
杨金禄(1981—),男,博士学位,主要从事载人航天器空间技术试验技术研究。E-mail: yangjinluy2k@sina.com。
2016-05-23;
:2016-11-24